






欢迎大家关注我的B站:
偷吃薯片的Zheng同学的个人空间-偷吃薯片的Zheng同学个人主页-哔哩哔哩视频 (bilibili.com)
目录
1 自主导航框架的基本介绍
在移动机器人领域往往进行模块化的开发,自主导航系统的功能分为感知、规划、控制,明确他们之间的输入输出关系。在信息共享的基础上就能进行协同导航,从而单机系统延伸为集群系统。

研究现状:目前的无人机单机系统运行速度慢,只能应对比较稀疏的简单环境。对本身系统的建模,需要对物理系统的动力学系统精准描述,同时又需要对环境进行建模,从感知中得到的数据怎么处理成规划模块读得懂的数据结构是一个非常重要的问题。
规划等于开环的控制,控制等于闭环的规划。这是对于初学者值得思考的一个问题。

2 无人系统的自主导航
2.1 快速重规划

根据前面讲的自主导航框架快速生成轨迹,应用于室内外全自主飞行。
2.2 高机动轨迹生成

两个基本的planner: 一个是微分平坦,根据障碍物的空间分布,让障碍物产生推力,把这个梯度信息叠加在生成的轨迹上(类似人工势场),代价函数传导到轨迹空间里变成优化问题。还有一个planner是用FreeSpace,也就是用安全凸空间的叠加来表征环境空间。机器人不care那些不可通行而更关注哪里可以关注。两种方法出发点不同。
2.3 具有时间最优运动原语的超轻量级规划器



2.4 实时交互的自主航拍系统




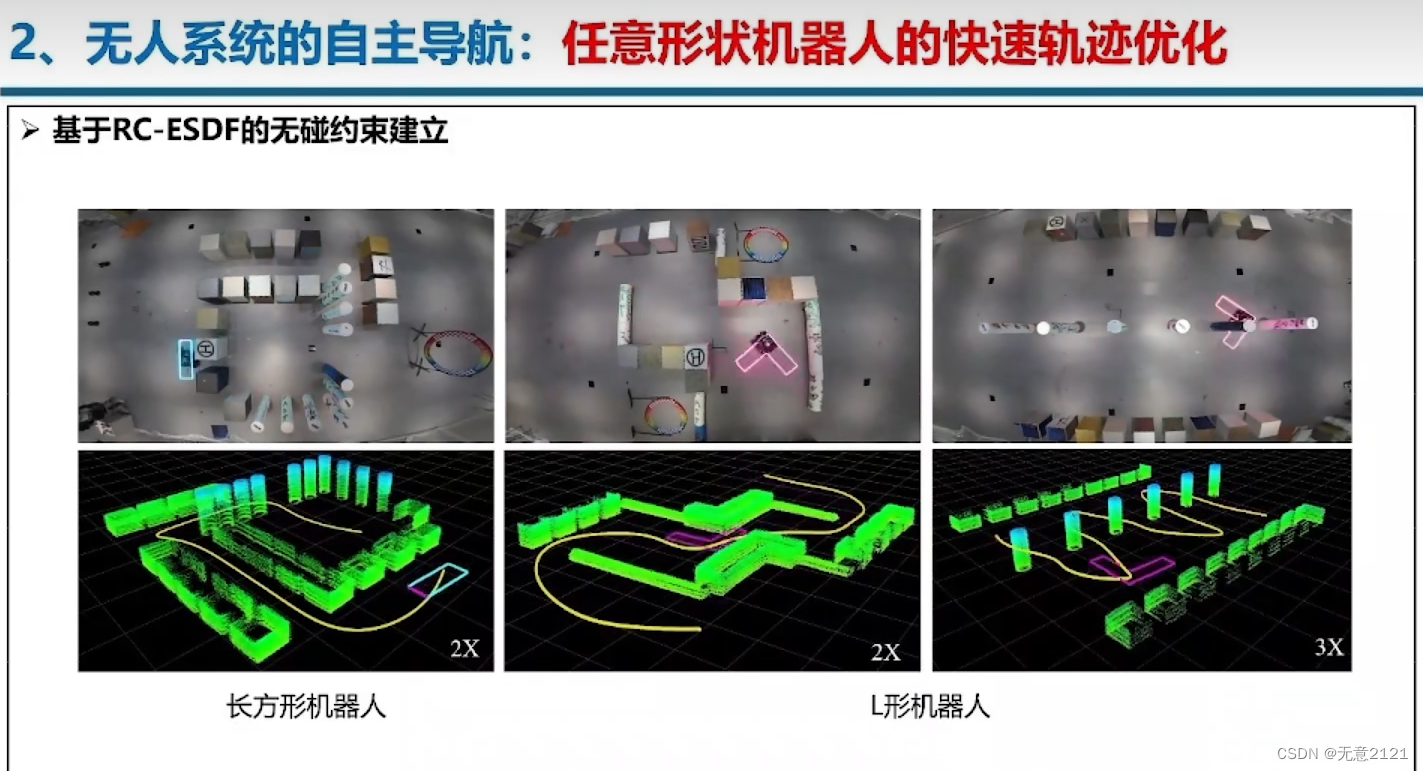
2.5 任意形状机器人的快速轨迹优化
提出L型机器人,可以应用于矩形机器人也就是car-like robot,传统方法把机器人离散成很多点,把每个点的ESDF信息叠加去处理,现在是离线处理,先把机器人的ESDF图确定,其实就是反过来,机器人是确定的但环境是不确定的。

2.6 超越2D环境的地面移动机器人
工作环境不一定是平坦地面,可能是崎岖地形或多层结构,新结构的机器人有高度方向的主动运动功能



2.7 基于微分平坦的无人车轨迹生成
无人车的分层规划框架:一种思路是全状态的最优控制,既保持解全状态空间MPC,全维度的最优控制序列,还有一种是小车作为质点作frenet坐标系下的径向和切向的运动分解。这两张是传统方法,高飞提出借鉴无人机中微分平坦的方法,应用到阿克曼转向的小车上作规划,作微分平坦空间中全尺寸的规划。静态避障用安全走廊,动态障碍物用符号距离。两个凸的符号距离函数近似表示


 3 复杂环境集群自主协同
3 复杂环境集群自主协同
3.1 全自主微型无人机集群系统










3.2 非质点地面移动机器人的去中心化集群




















 1378
1378

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











