







 提出FUEL,一种支持无人机在复杂未知环境中高效探索的分层框架。通过边界信息结构(FIS)维护重要信息并逐步更新,结合分级规划策略实现全局最优路径规划与局部视点优化,最终生成最短时间轨迹。
提出FUEL,一种支持无人机在复杂未知环境中高效探索的分层框架。通过边界信息结构(FIS)维护重要信息并逐步更新,结合分级规划策略实现全局最优路径规划与局部视点优化,最终生成最短时间轨迹。
论文阅读 FUEL: Fast UAV Exploration using Incremental Frontier Structure and Hierarchical Planning
港科最新的一篇关于无人机探索建图的 RAL2020
不得不说他们出文章速度太快了
这篇看的比较粗浅,只简单记录一下
问题
这篇针对的也是无人机探索环境建图的,和之前的基于边界的方法和基于信息增益的方法相比,他们一般都是基于贪心策略,比如最大化中间的信息增益或者移动到最近的未知区域,忽略了全局最优性,而这个方法特殊在考虑全局最优性并且速度是真的快(3-8倍)。
摘要
对于无人机的各种应用,自主探索是一个基本问题。然而,由于缺乏有效的全局覆盖,保守的运动计划和较低的决策频率,现有方法被证明勘探效率不足。在本文中,我们提出了FUEL,这是一种分层框架,可以在复杂的未知环境中支持“快速UAV挖掘”。我们通过边界信息结构(FIS)在勘探计划所需的整个空间中维护重要信息,该信息可以在探索空间时逐步更新。在FIS的支持下,分级计划者分三步计划勘探活动,这些活动将寻找有效的全球覆盖路径,完善局部视点集并依次生成最短时间轨迹。我们提供了广泛的基准测试和实际测试,其中,与最新方法相比,我们的方法以前所未有的效率(快3-8倍)完成了勘探任务。我们的方法将开源。
主要贡献
- frontier-information-structure FIS 边界信息结构
- a hierarchical planner: global exploration + local refinement + minimun time trajectory generation
方法
FIS
边界被定义为已知free并且与未知栅格相邻的栅格
检测并提取边界为后续规划使用
在FIS里,对于每个边界簇,存储所有属于该簇的边界栅格C以及其平均位置P,还有一个轴对齐的边框B,以及覆盖这个边界簇的候选视角,和一个存储该边界簇到其他边界簇连接成本的双向链表
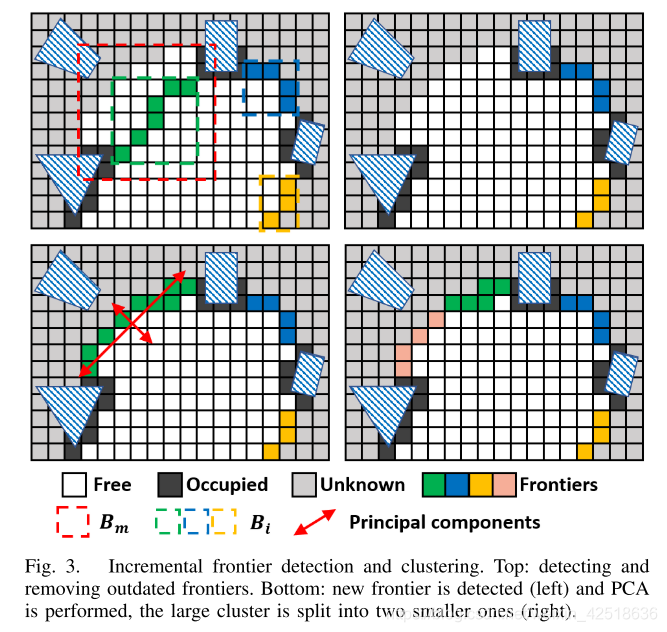
增量更新FIS
红色的Bm是更新后边界区域的AABB框。
- 遍历所有的边界集群,返回Bi与Bm相交的点。
- 对返回的集群进行精确检查,其中包含不再属于边界单元的集群将被删除
- 对每个簇执行PCA分析如果最大特征值超过阈值,将其沿第一主轴分成两份,这样可以把大的边界递归地分解为小的边界
 ### 采样viewpoint并计算成本
### 采样viewpoint并计算成本
使用一个极坐标系,中点在簇的中心,在极坐标系内行均匀采样来找到VPi
对每个VP根据使覆盖范围最大来确定yaw角
覆盖范围的计算是根据传感器模型,与已占用的栅格不冲突的边界栅格的数量
根据覆盖的大小递减排序,最多留前N个点
并且计算两个viewpoint的最短时间
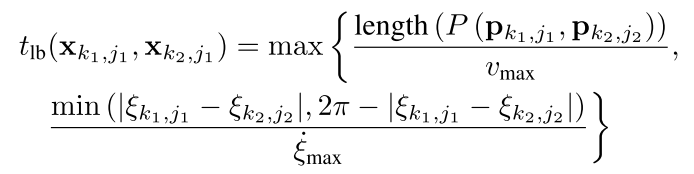 公式里写错了,应该都是j1的
公式里写错了,应该都是j1的
因为排序后,覆盖最大的排在第一位,所以分别用第一位之间的最短时间来估计两个边界的间距,P是两个点之间用A*规划出的路径
EXPLORATION PLANNING
全局规划
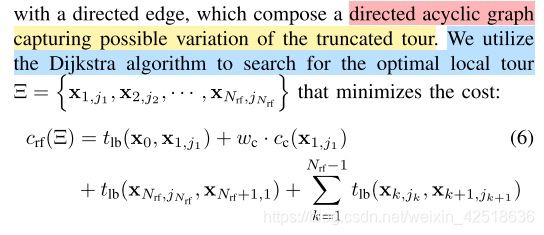
全局规划的目标是把检测到的各个边界以最优的顺序串起来,当做一个旅行商问题(TSP)
文中提到的受启发的那篇文章我也看过,但是为什么自己想不到呢
把这个问题简化为一个标准的非对称TSP
通过找到最优的闭环回路并检索其等价的开环回路来获得最优的开环回路

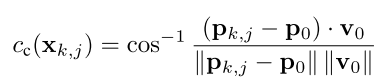
后面这个是运动一致性成本,来惩罚运动方向的改变
局部改善
emm我的理解是局部给了更多的点来考虑
emmm其实没有很理解
最小时间B样条轨迹
和他们之前用的方法很像
进一步优化B样条的所有参数,从而使总轨迹时间最小化
平衡平滑度和总体时间,并且保证了安全和运动可达

fs 平滑度成本
 T是时间
T是时间
fc 是通过惩罚到障碍物的距离来保证安全
fv 和 fa 保证运动学可达性,其实就是最大速度和加速度
实验
实验的话和传统的基于边界 uzh提出的fast基于边界的 nbvp进行了对比
传感器用的是RealSense D435i
效果的确好,用的时间很短,并且看轨迹的话,也少了那些来回往复的轨迹


















 1003
1003

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









