









💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
一个可靠的控制器对于自动驾驶汽车的安全和平稳操纵的执行至关重要。控制器必须对外部干扰(如路面、天气、风况等)具有鲁棒性。它还需要处理车辆子系统的内部变化,包括动力系统效率低下、测量误差等。
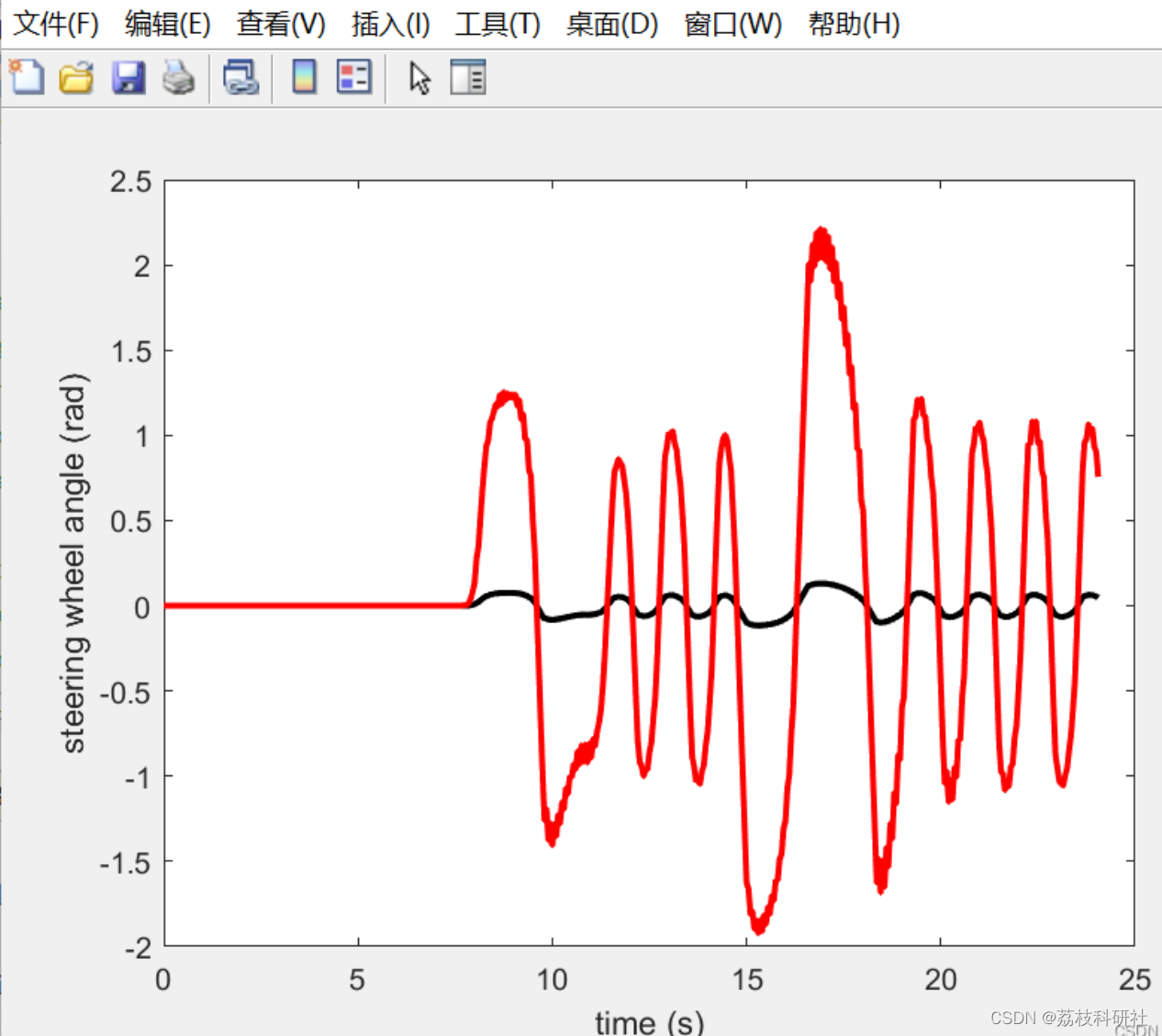
📚2 运行结果




部分代码:
% 测试工作空间
% plot(x_real.data,y_real.data,'r-',x_predict.data,y_predict.data,'k-')
% input1是MPC输出的期望前轮转角,2是实际速度,3是方向盘转矩,4是方向盘角速度,5是期望1-实际4的差值
% output是0.2s后的期望delta-实际delta
% save NNdata290.mat
% load NNdata80.mat
% 由于zero-orderd的原因,delta_real的t时刻记录的数据其实是t-1时刻的,记录错位了0.05s
% 但实际延迟还是0.2s,只是input的记录延迟了,real(t=6)= predict(t=1)
clc; clear;
load double_lane_change_0.2s_0.02_2.mat
% load double_lane_change_0.2s_0.02.mat
% 24s*20=480 延时0.1s,周期0.05s 所以预测未来2步的
% 步数差距越小越好预测,所以可以采用小延时,改动△u来增大误差
input1 = delta_predict.data(1:360,1);
%input2 = v_real.data(1:360,1);
input3 = steer_torque.data(1:360,1);
input4 = omega.data(1:360,1);
% input4 = delta_real.data(1501:5795,1);
% input5 = delta_predict.data(1:360,1) - delta_real.data(1:360,1);
% input_train = [input1, input2, input3,input4, input5]';
input_train = [input1, input3, input4]';
input_train = con2seq(input_train);
future_err = (delta_predict.data(5:364,1) - delta_real.data(6:365,1))';
output_train = con2seq(future_err);
n=3; % 应该是x的输入数据为,x(t-0) ——> x(t-3)
m=0;
net1 = timedelaynet(m:n,[3]); % 依赖于过去x,y的两个时间单位的值,隐含层10个节点
% narxnet(inputDelays,feedbackDelays,hiddenSizes,trainFcn) takes these arguments,
% inputDelays Row vector of increasing 0 or positive delays (default = 1:2)
% feedbackDelays Row vector of increasing 0 or positive delays (default = 1:2)
% hiddenSizes Row vector of one or more hidden layer sizes (default = 10)
% trainFcn Training function (default = 'trainlm')
net1.divideFcn = '';
net1.trainParam.min_grad = 1e-15;
net1.trainParam.epochs = 25;
% net1.trainParam.lr = 0.005;
[Xs,Xi,Ai,Ts] = preparets(net1,input_train,output_train); % 数据准备
% Prepare input and target time series data for network simulation or training
% [Xs,Xi,Ai,Ts,EWs,shift] = preparets(net,Xnf,Tnf,Tf,EW) takes these arguments,
% p Xs Shifted inputs 2x4289 cell 每个cell是3+1
% Pi Xi Initial input delay states 2x6 cell 初始化输入
% Ai Ai Initial layer delay states 没用上
% t Ts Shifted targets 1x4289 目标值
net1 = train(net1,Xs,Ts,Xi); % 训练,没用上 Ai
% save ('newdata+buchang80_2_TDnet') % 只用了第二次迭代跑的80s的数据
% view(net1)
% net2 = removedelay(net1,m); 不用removedelay?
% view(net2)
net2 = net1;
% 加入后可以不输入output_test了?
% save ('net_narx290_removedelay')
gensim(net2, 0.05)
% 换了输入输出又来一遍,测试集?
% input_test1 = delta_predict.data(1:1495,1);
% input_test2 = v_real.data(1:1495,1);
% input_test3 = steer_torque.data(1:1495,1);
input_test1 = delta_predict.data(1:475,1);
% input_test2 = v_real.data(1:477,1);
input_test3 = steer_torque.data(1:475,1);
input_test4 = omega.data(1:475,1);
% input_test4 = delta_real.data(1:1495,1);
% input_test5 = delta_predict.data(1:475,1) - delta_real.data(1:475,1);
% input_test = [input_test1, input_test2, input_test3, input_test4, input_test5]';
% input_test = [input_test1, input_test2, input_test3]';
input_test = [input_test1, input_test3, input_test4]';
input_test = con2seq(input_test);
% future_err_test = (delta_predict.data(5:1499,1) - delta_real.data(6:1500,1))';
future_err_test = (delta_predict.data(5:479,1) - delta_real.data(6:480,1))';
output_test = con2seq(future_err_test);
[Xs1,Xi1,Ai1,Ts1] = preparets(net2,input_test,{}); % 数据准备
predict_err = sim(net2,Xs1,Xi1); % 仿真,yp是预测的误差
[Xs1,Xi1,Ai1,Ts1] = preparets(net2,input_test,output_test); % 数据准备
e = cell2mat(predict_err)-cell2mat(Ts1); % 为什么要用cell2mat??输出(估计)误差 - 期望(实际)误差
% x = (5+n:1499)/20;
x = (5+n:479)/20;
figure(1)
plot(x,e,'b')
xlabel('t/s')
ylabel('delta error/rad')
legend('err_err')
🌈3 Matlab代码实现
🎉4 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]侯忠生,许建新.数据驱动控制理论及方法的回顾和展望[J].自动化学报,2009,35(06):650-667.















 1407
1407











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









