






 本文提出了一种利用Koopman算子和扩展动态模态分解的算法,解决四旋翼无人机的非线性控制系统问题。通过非欧拉角的观测和SE(3)流形表示,EDMD模型能准确预测并推广至多验证集。设计的MPC控制器能实现实时跟踪,有效应对模型不确定性。
本文提出了一种利用Koopman算子和扩展动态模态分解的算法,解决四旋翼无人机的非线性控制系统问题。通过非欧拉角的观测和SE(3)流形表示,EDMD模型能准确预测并推广至多验证集。设计的MPC控制器能实现实时跟踪,有效应对模型不确定性。
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
摘要
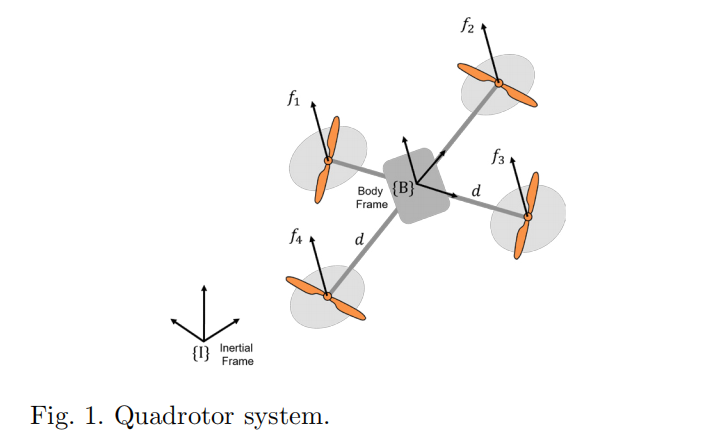
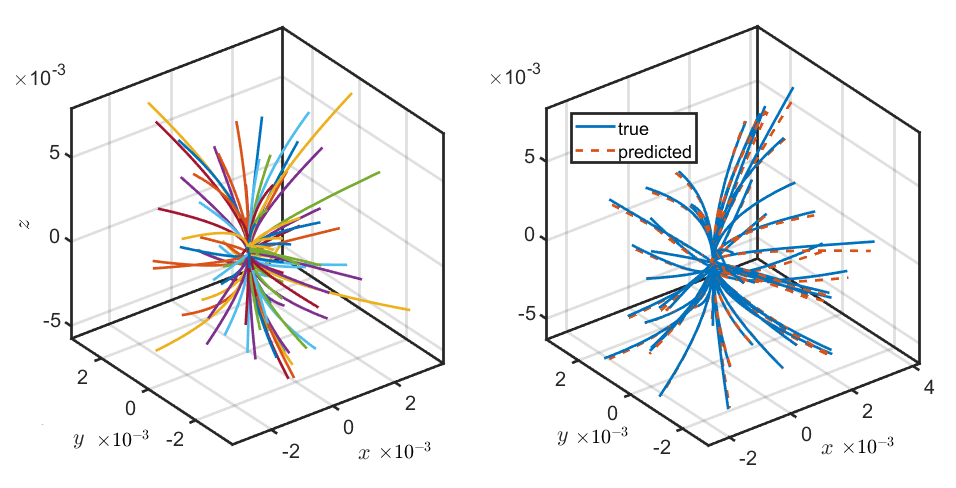
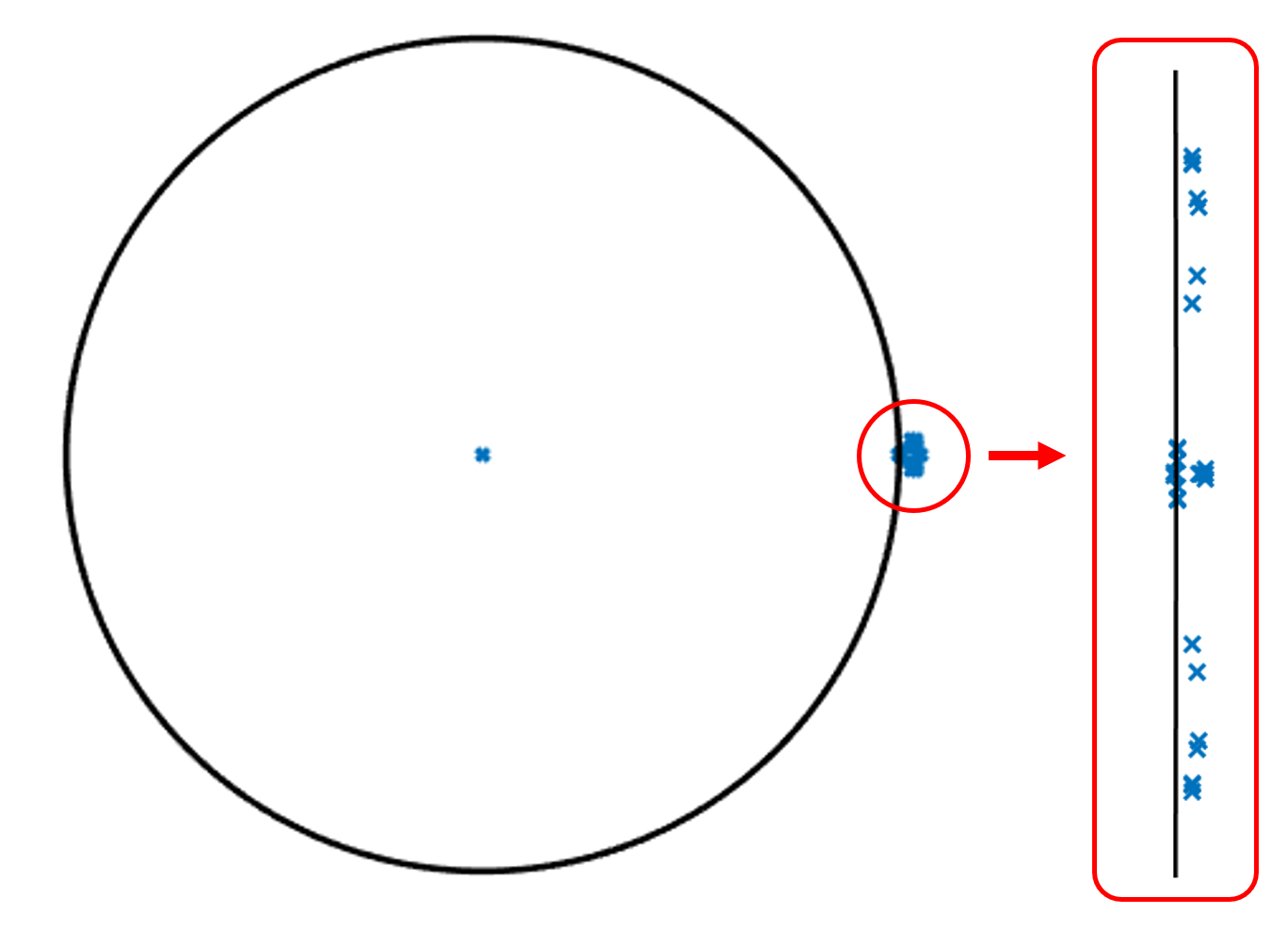
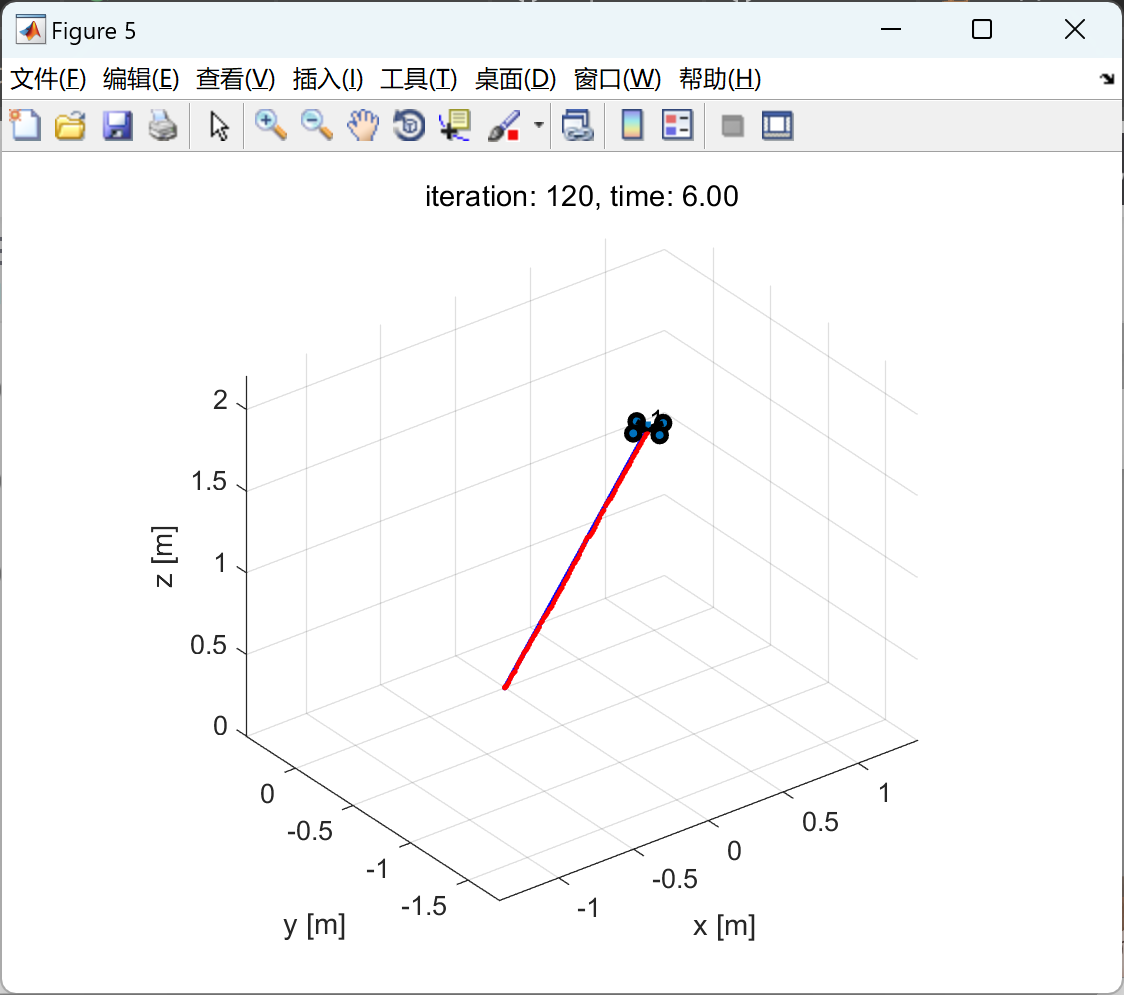
本文提出了一种基于Koopman算子和扩展动态模态分解(EDMD)的四旋翼无人机学习和控制的新型数据驱动方法。基于常规方法如欧拉角(表示方向)构建EDMD的可观测量已知涉及奇异性。为解决这一问题,我们采用基于非线性系统底层拓扑的一组信息物理可观测量。我们使用旋转矩阵直接表示方向动态,并在SE(3)流形中获得非线性四旋翼动态的抬升线性表示。这种EDMD模型能够进行准确预测,并且能够推广到多个验证集。此外,我们基于提出的EDMD模型设计了一个线性模型预测控制器(MPC)来跟踪敏捷的参考轨迹。模拟结果显示,所提出的MPC控制器的运行速度可达100赫兹,并且能够以很高的准确性跟踪任意参考轨迹。
设计非线性机器人系统的最优控制器是一个具有挑战性的问题。目标是开发一个能够稳定系统并遵循参考轨迹的控制器,同时遵守由系统动态和执行器限制引起的约束。模型预测控制(MPC)是一种基于优化的方法,可以用于实现这一目标(Rawlings等人(2017);Berberich等人(2022))。指定性能指标和约束的能力使得在设计非线性系统控制器时非常直观。尽管最近优化技术和计算能力的进步(Kouzoupis等人(2018);Gros等人(2020))已经使得实时实现非线性模型预测控制器(NMPC)成为可能,但它们仍然需要足够精确的数学模型,并且无法处理模型不确定性。为了解决其中一些问题,Hou和Wang(2013);Hewing等人(2019);Krolicki等人(2022)已经开发了数据驱动技术,而Lusch等人(2018);Han等人(2020);Wang等人(2021)则开发了基于学习的方法来识别系统的潜在模型。然而,这些方法计算密集且不能应用于一般的高维非线性系统。为了克服与NMPC相关的问题,我们提出了一种基于Koopman算子的方法,用于学习受控非线性动态系统的线性预测器。Koopman算子控制一组可观测函数的演变,这些函数可以被解释为非线性。
📚2 运行结果



🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
Sriram S.K.S. Narayanan ∗, Duvan Tellez-Castro ∗, Sarang Sutavani ∗, Umesh Vaidya















 738
738











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









