






- 微空科技MTF-01光流调试
PX4光流调试参考文档:https://docs.px4.io/main/en/sensor/optical_flow.html
微空MTF-01光流:https://micoair.cn/docs/MTF01-guang-liu-ce-ju-yi-ti-chuan-gan-qi-yong-hu- shou-ce
warning:目前MTF-01智能使用telem口
1.14.x-
MAV_1_CONFIG TELEM n
重启飞控
MAV_1_MODE Normal
SER_TELn_BAUD 115200 8N1
EKF2_OF_CTRL Enabled
EKF2_RNG_CTRL Enabled
EKF2_HGT_REF Range sensor
重启飞控
SENS_FLOW_ROT No rotation (1.14及以后版本该参数默认值如此,无需设置)
重启飞控,一切正常的话,在QGC的MAVLink Inspector页面中应该能看到DISTANCE_SENSOR和OPTICAL_FLOW_RAD消息。注意,QGC上显示的消息由飞控发出,消息频率并不等同于传感器的数据频率,这个频率由飞控的设置和数据链路的速度决定,主要用于观察,消息频率多少并不重要。
如果地面站是通过某些数传连接飞控时,由于数据链路速率较低,飞控会选择性发出数据,导致在QGC有可能看不到某些消息帧比如OPTICAL_FLOW_RAD,因此这一步建议使用USB连接飞控。
- 解锁报错:error:resolve system health failures first
原因1:罗盘未校准
原因2:电池未校准,比如电池电压未校准,6s电池总电压计算得出四十多V,需要校准。
电池校准https://docs.qgroundcontrol.com/master/en/qgc-user-guide/setup_view/power.html
- 飞控上电调校准报错:time out error
需要给电调直接供电,不能经过电流计。电流计内部有大电容,直接给其供电时,会先给大电容充电后,再 给电调供电。
设置Altitude mode:只靠PX4飞控内部气压计也可以进入定高模式,当然使用单点激光雷达更好。可以在定高模式下起飞。
在PX4的**Altitude mode(高度模式)**下,油门推到62.5%以上的行为是根据当前状态和配置决定的,具体如下:
### **1. 正常情况下(已经解锁并在地面时):**
- **缓慢起飞(平稳爬升)**:
- 在Altitude mode中,油门的作用是调节垂直速度,而不是直接控制电机功率。
- **中位油门(50%)**:保持当前高度(不升、不降)。
- **高于中位油门(>50%)**:飞行器开始上升,油门越大,上升速度越快。
- **低于中位油门(<50%)**:飞行器开始下降。
当油门推到62.5%时,上升速度会加快,但起飞过程依然是**平稳爬升**,而不是立即快速起飞。
### **2. 特殊情况(如一键起飞模式):**
- 如果你通过地面站或遥控器触发了**一键起飞**(Takeoff Command),飞行器会按照预设的起飞流程(通常是稳定爬升到一定高度)起飞,此时油门控制被飞控接管。
- Altitude mode本身并不直接支持"一键起飞",需要配合命令触发。
### **关键点:**
- **62.5%的油门**不会触发"一键起飞",只是表示让飞行器以较快的速度爬升。
- 起飞速度的快慢主要取决于飞控的配置,如最大爬升速率(`MPC_Z_VEL_MAX_UP`)和油门分布(`MPC_THR_HOVER`)。
### **检查参数:**
你可以检查以下PX4参数,了解或调整Altitude mode下的性能:
1. **`MPC_THR_HOVER`**:
- 设置悬停油门值(通常为50%)。
- 确保飞行器在50%油门时能够稳定悬停。
2. **`MPC_Z_VEL_MAX_UP`**:
- 最大上升速度(默认约2-3 m/s)。
- 如果上升速度太慢或太快,可以通过调整该参数优化。
3. **`MPC_Z_VEL_MAX_DN`**:
- 最大下降速度。
4. **`MPC_TAKEOFF_ALT`**(一键起飞模式下的目标高度):
- 如果通过地面站或遥控器触发了一键起飞,飞行器会爬升到此参数设定的高度。
如果你观察到62.5%以上油门引发的行为与预期不符,可以提供飞控日志进一步分析。
设置Position mode:需要提供局部位置估计的传感器(e.g.光流,VINS,激光雷达,动捕,GPS/RTK),可以在Positon mode模式下起飞,油门推至62.5%左右。
设置return mode:RTL_RETURN_ALT``RTL_DESCEND_ALT参考:https://docs.px4.io/main/zh/flight_modes_mc/return.html
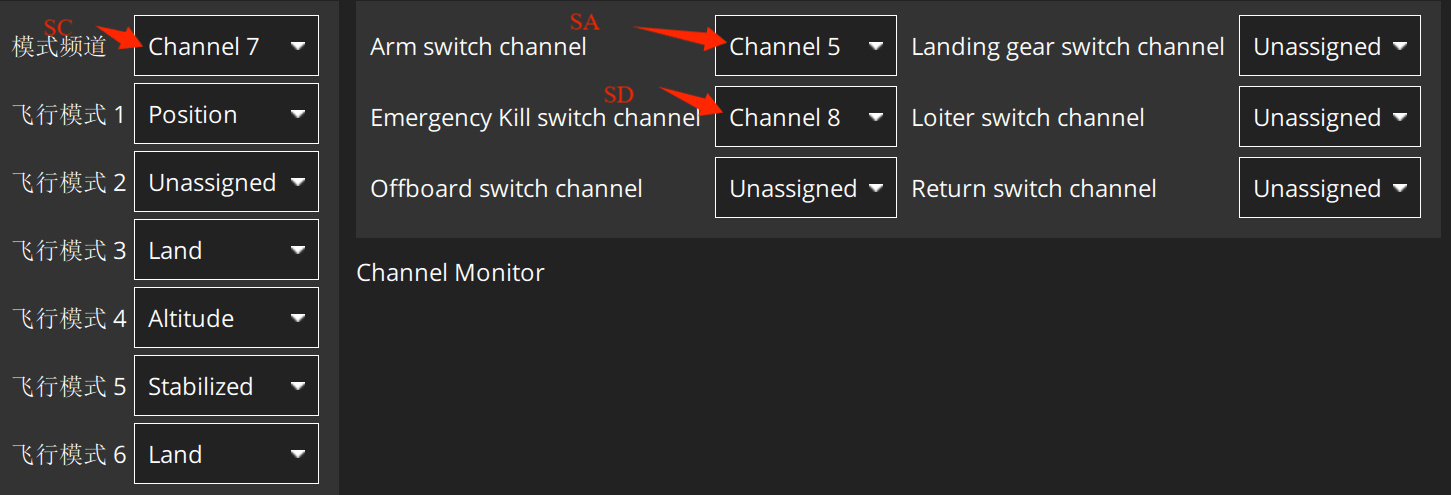
Arm switch channel:需要油门低位+按键。
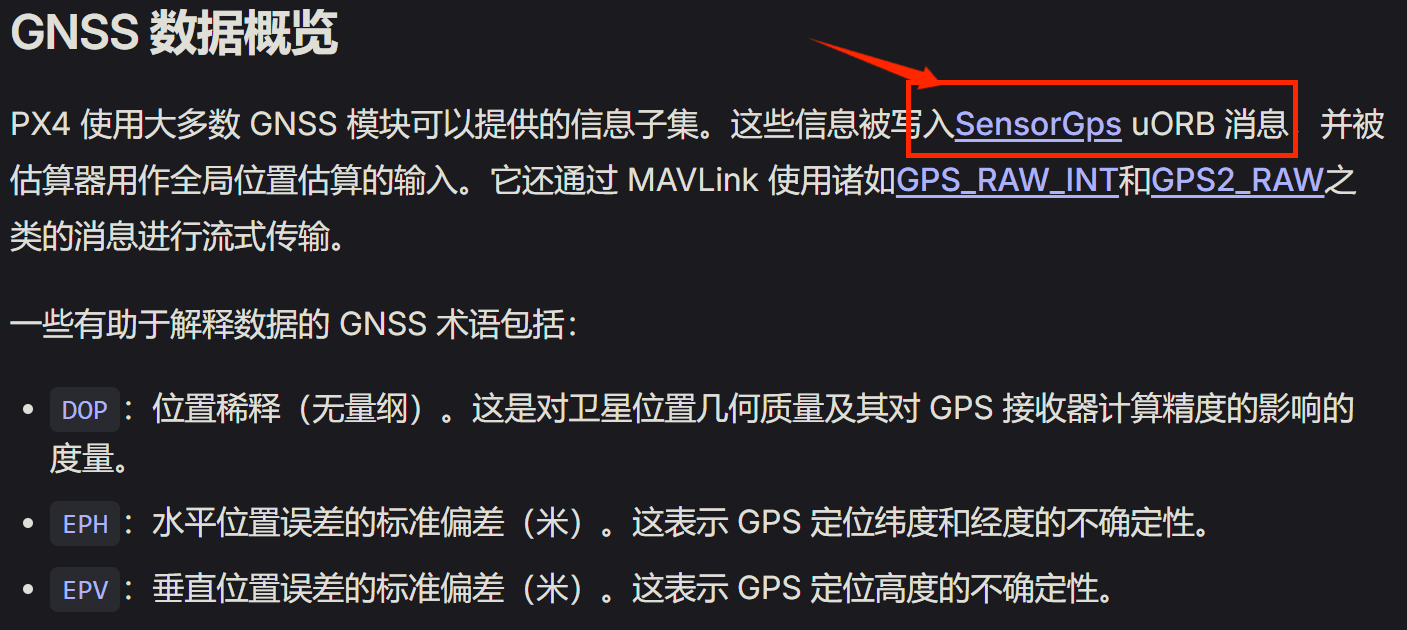
1). 位置(GNSS)丢失故障保护
PX4全局位置估计的质量较低,会触发该保护。
COM_POSCTL_NAVL:
选择Altitude/Manual:假设遥控器可控,则会进入定高模式(高度估计正常)或者手动模式
选择Land/Descend:假设遥控器不可控,则会进入降落模式(局部位置估计正常)或者紧急迫降
2). 遥控器丢失信号故障保护
QGC地面站安全里边设置为Land mode模式。
3). 地理围栏故障保护
设置飞行区域为rh = 20m10m,冲出围栏则设置为land mode模式。
4). 飞控外部控制连接丢失故障保护
飞控外部控制连接丢失,则可以自动切换到position mode 或者 land mode等模式
COM_OF_LOSS_T:连接丢失时间后保护
COM_OBL_RC_ACT:如果遥控器连接正常,则触发保护后飞行模式切换至position mode 或者其他。
COM_OF_LOSS_T设置为0.5s
COM_OBL_RC_ACT设置为position mode
5). 强风故障保护
暂时不设置。
- RTK-GPS(雷迅)使用

b. RTK相关信息:https://docs.px4.io/main/en/advanced/rtk_gps.html
EKF2_GPS_P_NOISE = 0.2
EKF2_GPS_V_NOISE = 0.2
c. 接上RTK-数传后,显示的是3D DGPS fixed而不是RTK DGPS fixed,猜测可能是因为数据下行太慢,可以在地面站上将MAV通道0的速度放开,同时将波特率设置到最大,在MAVLink控制台输入mavlink status查看相关状态。参考:https://docs.px4.io/main/en/advanced/rtk_gps.html#uplink-datarate
https://docs.qgroundcontrol.com/master/en/qgc-user-guide/setup_view/firmware.html
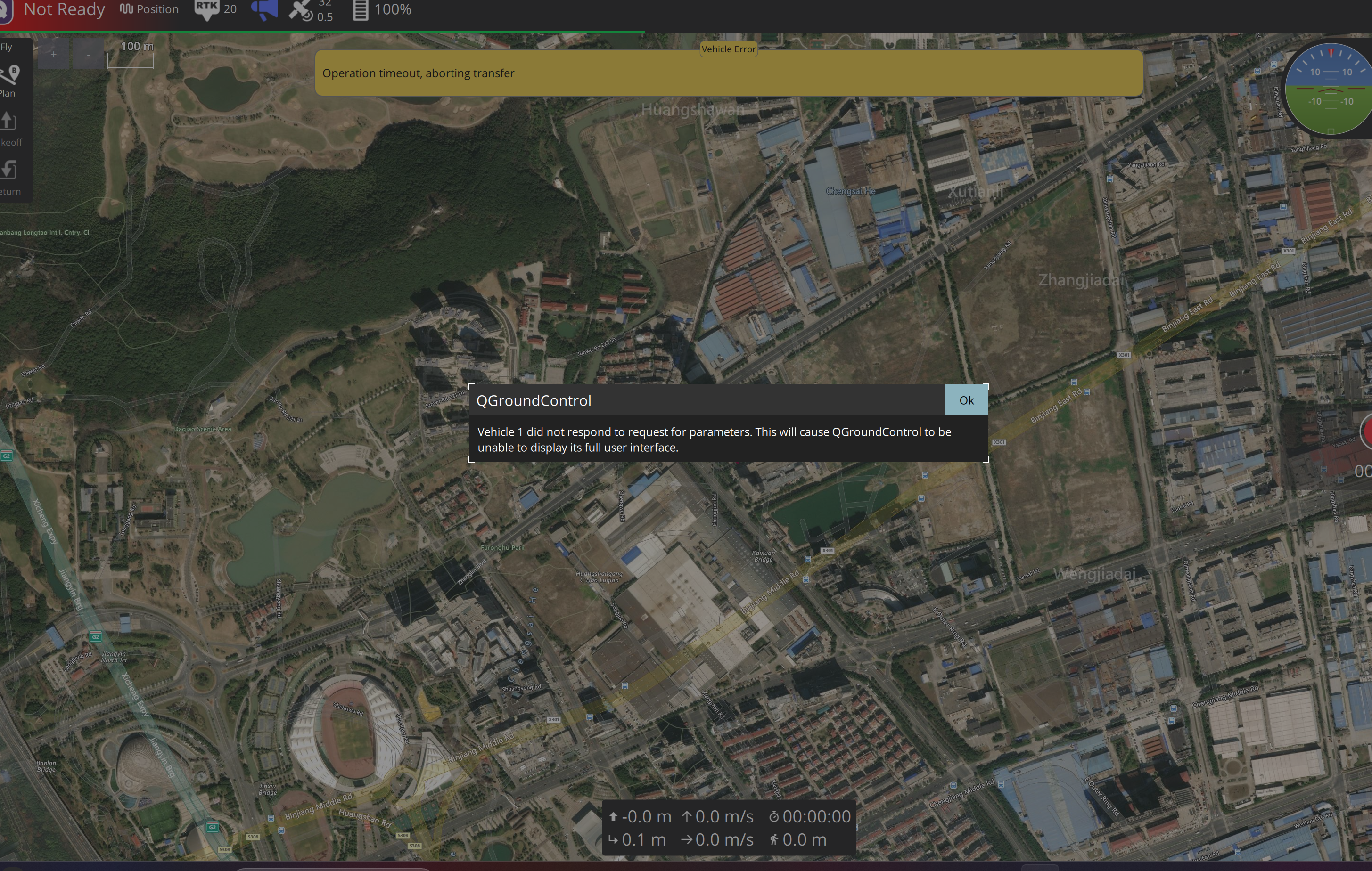
数传的数据传输太慢引起
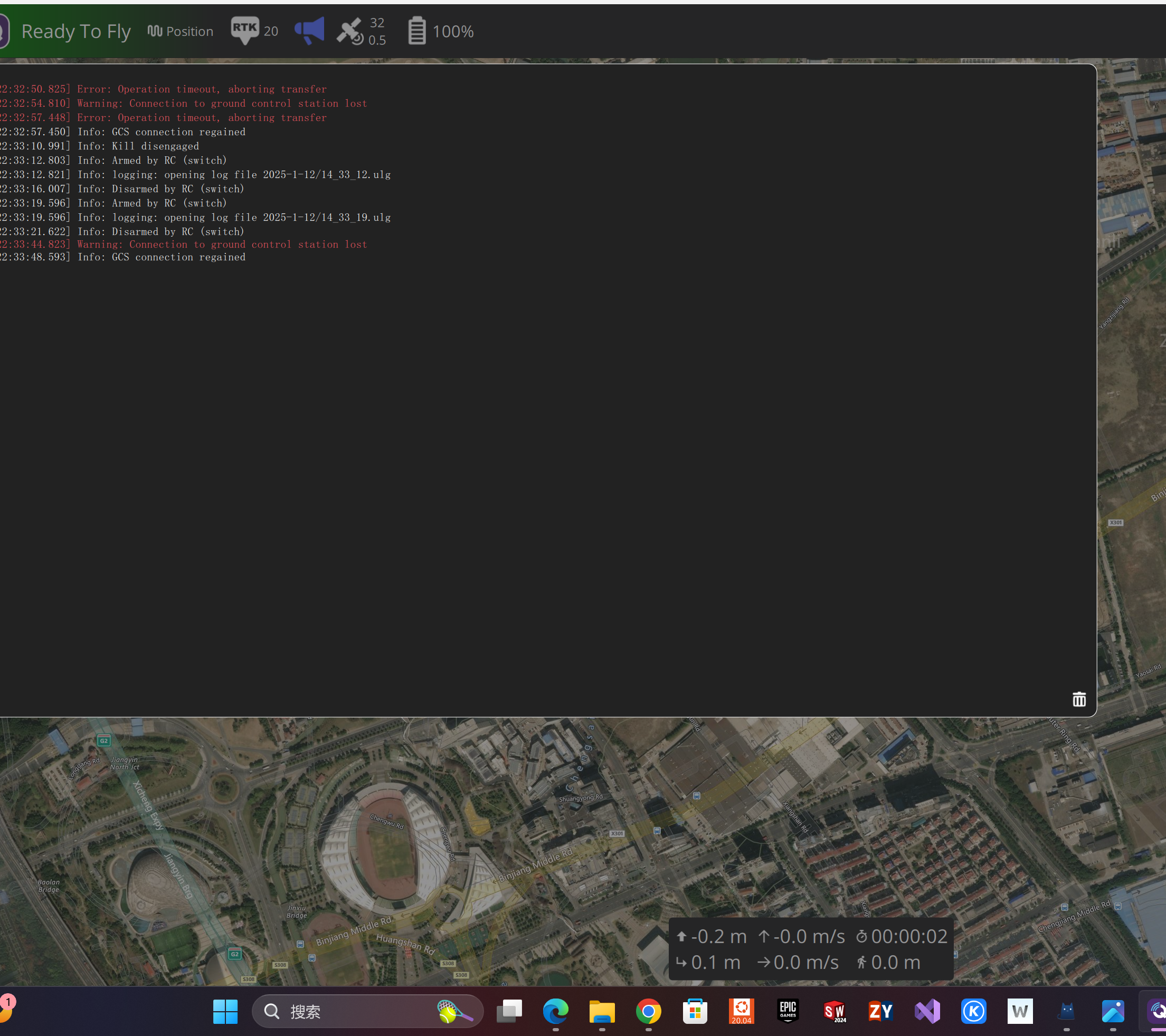
d. 使用Type-C口连接地面站仍然不行,目前猜测手持底面站关于Type-C通信固件有些问题,即便转成了串口,但是其通信带宽太小,从传输不了关于RTK的数据,同时地面站接受飞控的数据也会受影响,时不时会通信丢失WARNING:Connection to ground control station lost。因此将数传通信方式可以改成UDP,以规避改问题。
e. PX4无人机上电后,搜不到星, 图标一直显示0或者None,或者重启多次后卫星信息质量差,搜星不到30颗,
图标一直显示0或者None,或者重启多次后卫星信息质量差,搜星不到30颗, 移动端馈线的头部在使用时间较长或者弯折受力后容易虚焊,导致信号接收不良。
移动端馈线的头部在使用时间较长或者弯折受力后容易虚焊,导致信号接收不良。
- 飞控解锁后,推油门无人机自动断电问题。电源总线处接触不良,XT90接头(可能因为比较难插拔等原因)未完全插上,可承载的电流较小。

















 2363
2363

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









