






本章目标,学会用config来保存rviz的配置,每次都要重新去用挺麻烦的。
比如添加配置。
那么只需要进行如下几步:
首先,把当前配置保存进config目录
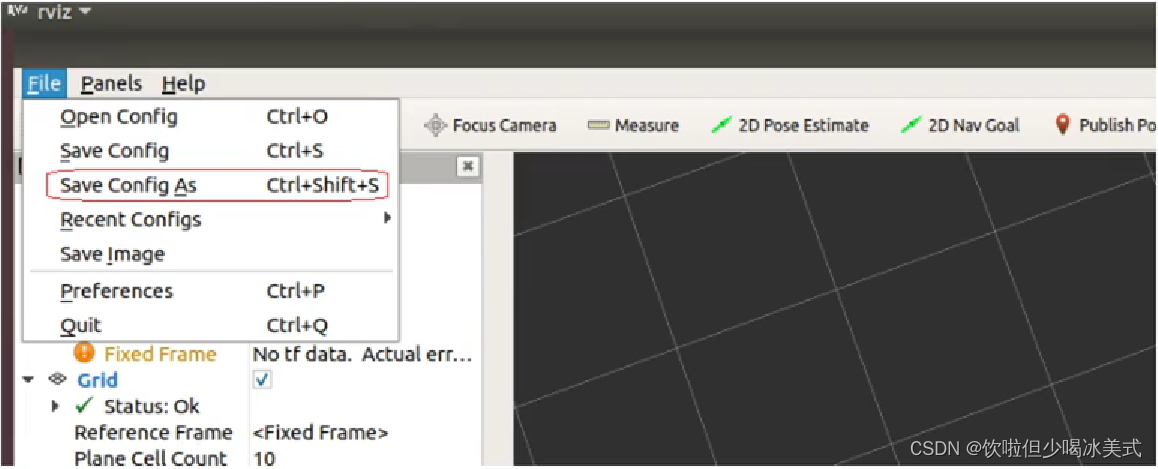
比如保存为show_mycar.rviz, 然后如果别的launch要用的时候,就在launch文件中 Rviz 的启动配置添加参数:args,值设置为-d 配置文件路径。
<launch>
<param name="robot_description" textfile="$(find 包名)/urdf/urdf/urdf01_HelloWorld.urdf" />
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find 报名)/config/rviz/show_mycar.rviz" />
</launch>
再启动时,就可以包含之前的组件配置了,使用更方便快捷。















 592
592











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









