







【ROS】发布点云资料
把kitti中的点云资料发布到点云空间中。
在代码 kitti.py 中新建一个发布点云的publisher。然后读取资料,并发布出去。
ROS中有一种格式叫 PointCloud2 专门用来发布点云。
点云数据位于 velodyne文件夹中。
每个bin文件里面都是一些点,每个点有4个数据。
把数据通过numpy读入:
point_cloud = numpy.fromfile(os.path.join(DATA_PATH,'velodyne_points/data/%010d.bin'%frame), dtype = numpy.float32).reshape(-1,4)
下一步,将点云用PointCloud2的形式发布出去。需要使用point_cloud2的资料库。由ros提供,可以import进来。
import sensor_msgs.point_cloud2 as pcl2
pcl_pub.publish(pcl2.create_cloud_xyz32(header,point_cloud[:,:3])) #取前三个数据,不用反射率
pcl2.create_cloud_xyz32函数表示xyz坐标都是float32格式数据。会把这个矩阵转换成PointCloud2的形式。
在使用该函数之前,需要通过Header添加数据的信息,包括时间和frame名称,名称可以自定义。
from std_msgs.msg import Header
header = Header()
header.stamp = rospy.Time.now()
header.frame_id = 'map'
完整代码:
#!/usr/bin/python
import cv2
import os
import numpy
import rospy
from std_msgs.msg import Header
from sensor_msgs.msg import Image,PointCloud2
import sensor_msgs.point_cloud2 as pcl2
from cv_bridge import CvBridge
DATA_PATH = '/home/ros/Documents/ros-kitticlass/2011_09_26/2011_09_26_drive_0005_sync'
if __name__ == '__main__':
frame = 0
rospy.init_node('kitti_node',anonymous=True)
cam_pub = rospy.Publisher('kitti_cam',Image,queue_size=10)
pcl_pub = rospy.Publisher('kitti_point_cloud', PointCloud2, queue_size=10) #PointCloud2
bridge = CvBridge()
rate = rospy.Rate(10)
while not rospy.is_shutdown():
# img = cv2.imread(os.path.join(DATA_PATH,'image_02/data/%010d.png'%0))
img = cv2.imread(os.path.join(DATA_PATH,'image_02/data/%010d.png'%frame))
point_cloud = numpy.fromfile(os.path.join(DATA_PATH,'velodyne_points/data/%010d.bin'%frame), dtype = numpy.float32).reshape(-1,4)
cam_pub.publish(bridge.cv2_to_imgmsg(img,"bgr8"))
header = Header()
header.stamp = rospy.Time.now()
header.frame_id = 'map'
pcl_pub.publish(pcl2.create_cloud_xyz32(header,point_cloud[:,:3]))
rospy.loginfo("published")
rate.sleep()
frame+=1
frame%=154
通过rosrun命令运行代码:
rosrun kitti_tutorial kitti.py
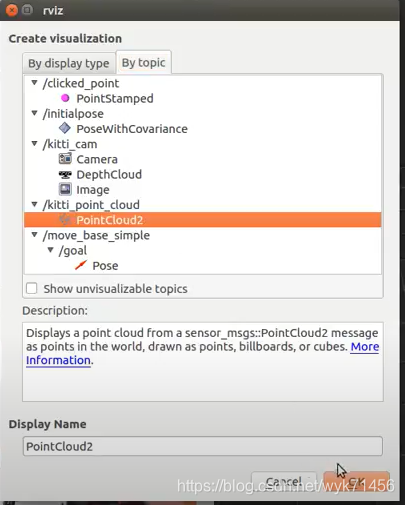
点击Add,添加PointCloud2
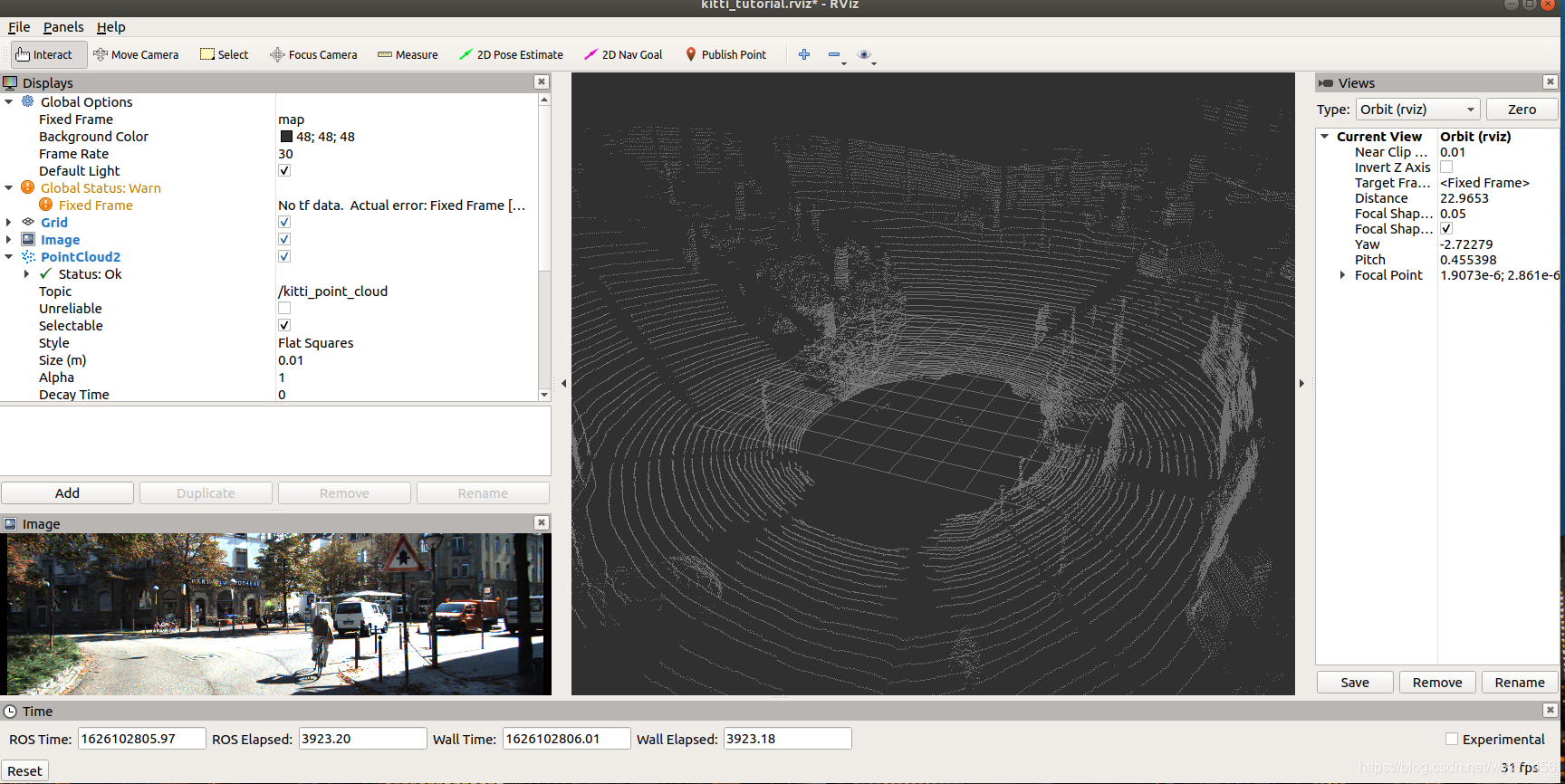
显示点云效果:














 4379
4379











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









