









经过前一段时间的积累,目前暂时成功实现了用自己的数据测试实现Vins-fusion+GPS融合,其实放在数据采集处理上的时间比较多,踩了很多坑,效果在一些部分还不是很好,后期持续优化吧
 其中黑色轨迹为VIO的输出轨迹,没加回环节点的,同时毛刺还比较多,不平滑,应该是我的双目相机标定的不好,但真是目前我标定得到的最佳数据了,唉~~~
其中黑色轨迹为VIO的输出轨迹,没加回环节点的,同时毛刺还比较多,不平滑,应该是我的双目相机标定的不好,但真是目前我标定得到的最佳数据了,唉~~~
紫色轨迹,被绿色基本覆盖的是RTK数据,中间存在丢帧及浮点解,因为围绕大楼,RTK浮点解数据还是偏多的
绿色的就是融合后的轨迹啦,其实已经大大优化了VIO的定位情况,但在部分地方出现很明显的折点情况,造成的原因无非RTK不好或VIO数据不好了,应该还有数据上的同步问题
×符号标注的地方是WGPS_T_WVIO更新点
融合轨迹:
evo_traj tum vio_global.txt -p

evo评测下吧~
由于没有同时采集真值,所以暂且和RTK数据比较下吧
evo_ape tum GPS.txt vio_global.txt -va --plot

APE w.r.t. translation part (m)
(with SE(3) Umeyama alignment)
max 3.483001
mean 0.582088
median 0.433857
min 0.060866
rmse 0.789349
sse 138.321790
std 0.533146
暂时只是先实现的基本的融合目标,优化之路道阻且长呀~
后续更新:
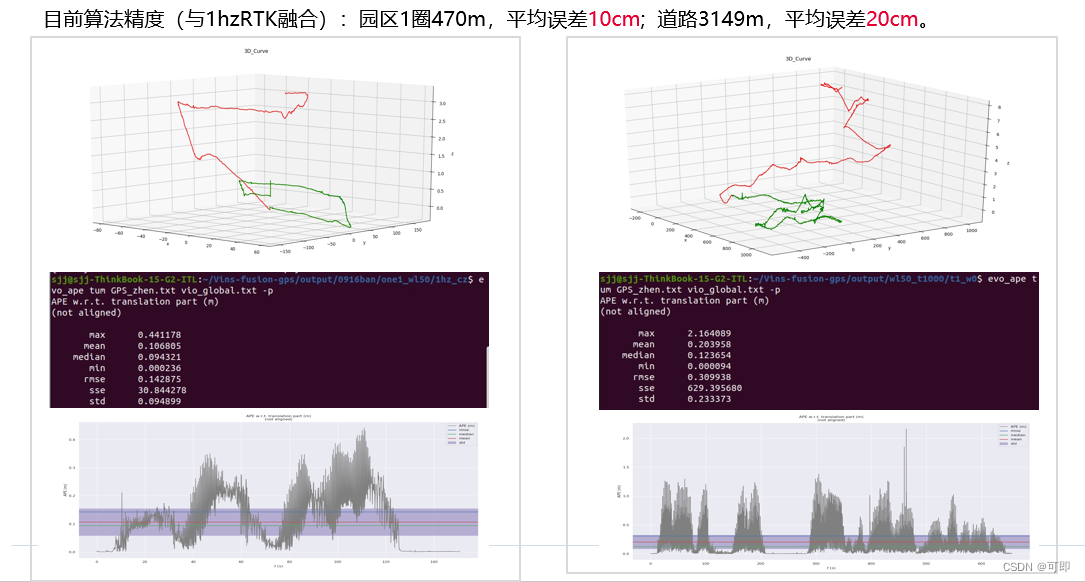
经过后期优化相机标定及算法bug,并上车测试后,目前定位精度可达到:
相机标定结果目前仍然较粗糙,需要专业的标定器材及专业的方式继续优化…















 9991
9991











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









