







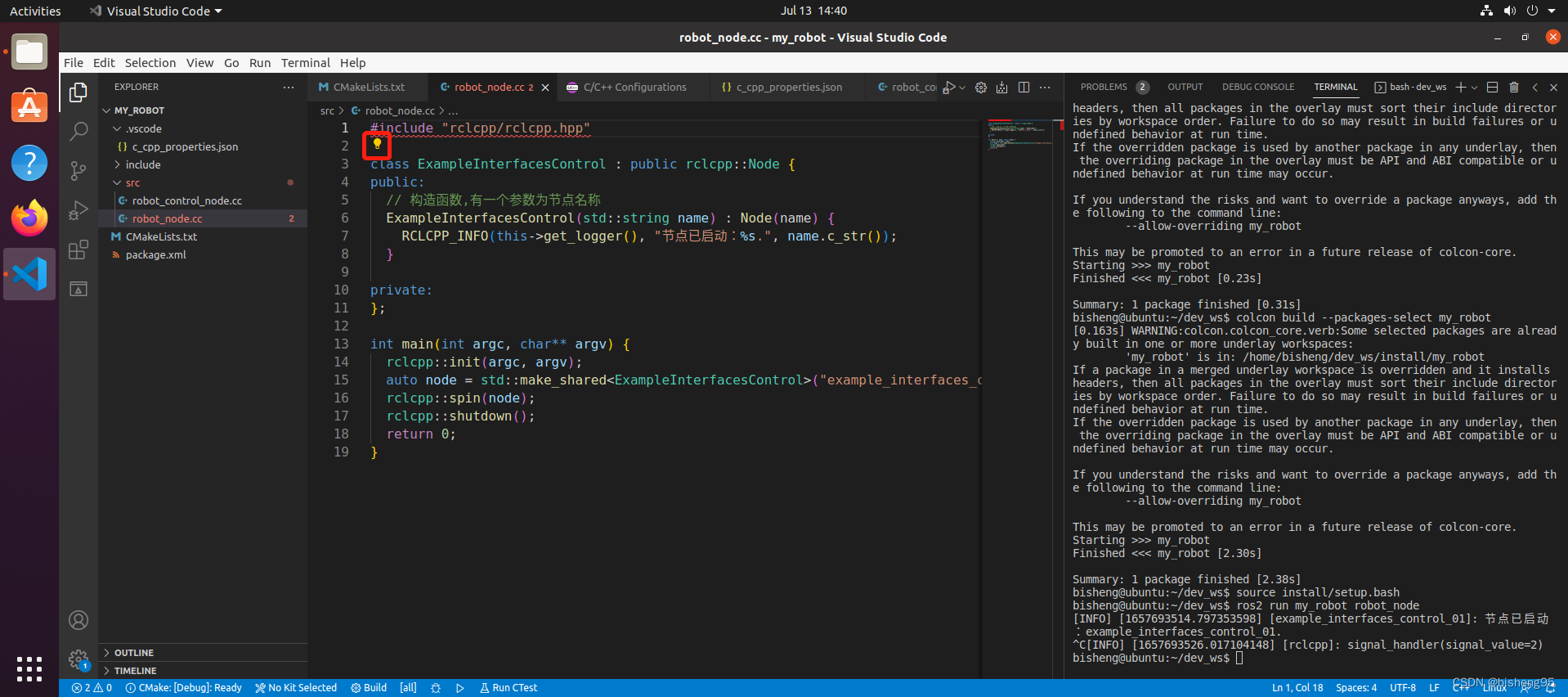
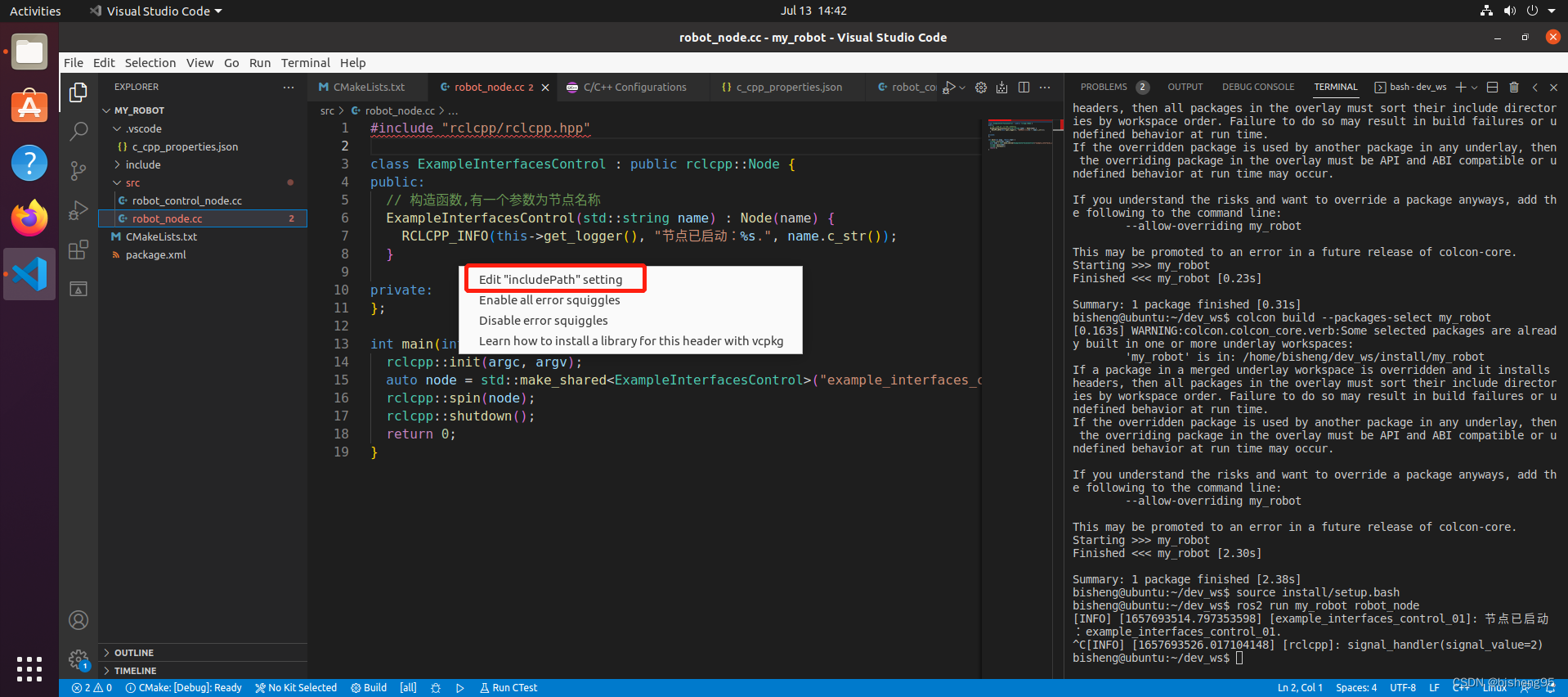
添加ros2头文件提示错误,如下图所示,点开小灯泡
Edit “includePath” setting
会出现c_cpp_properties.json
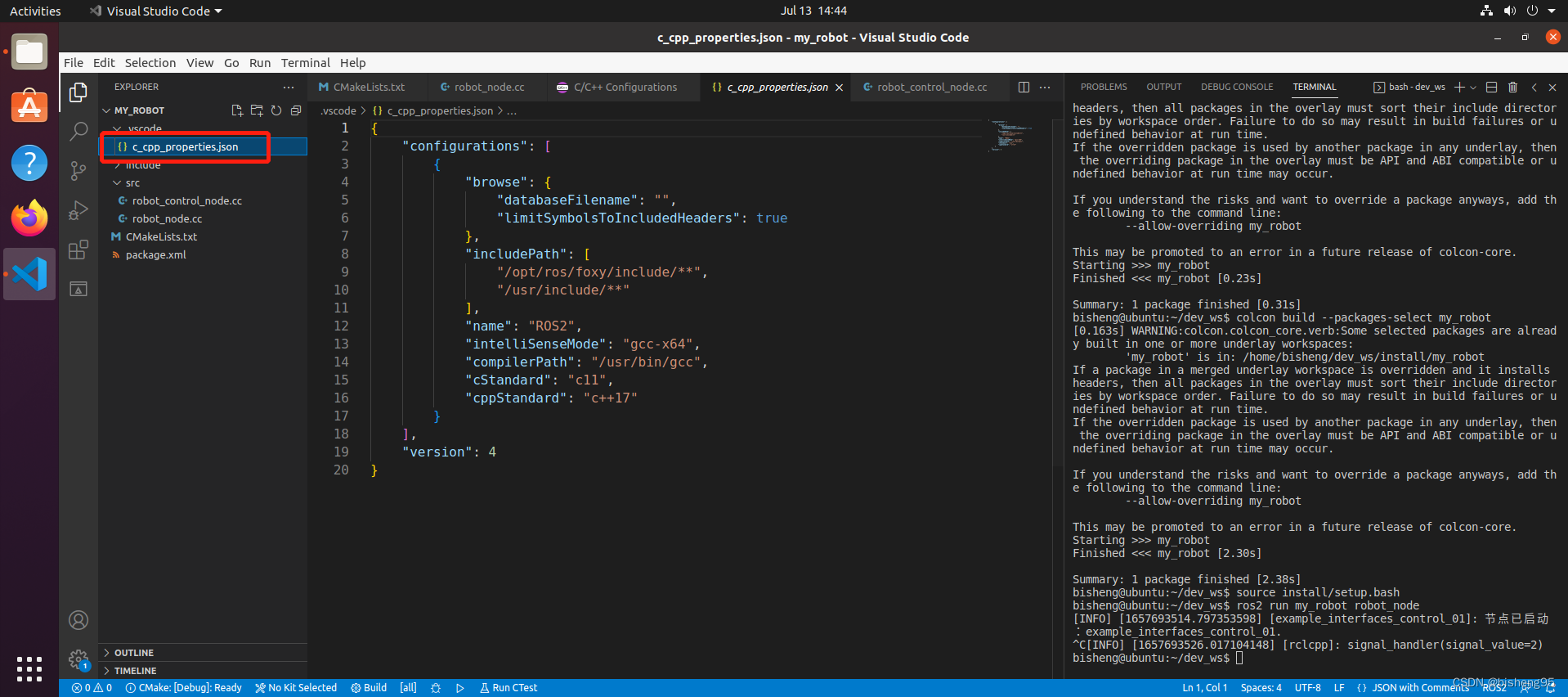
用以下代码替换原来配置,保存即可
{
"configurations": [
{
"browse": {
"databaseFilename": "",
"limitSymbolsToIncludedHeaders": true
},
"includePath": [
"/opt/ros/foxy/include/**", //ros2安装的头文件
"/home/bisheng/dev_ws/install/robot_interface/include/**", //自己定义的消息包的头文件
"/usr/include/**"
],
"name": "ROS2",
"intelliSenseMode": "gcc-x64",
"compilerPath": "/usr/bin/gcc",
"cStandard": "c11",
"cppStandard": "c++17"
}
],
"version": 4
}















 2067
2067











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









