







 本文详细介绍了GPS模糊度固定的过程,包括FCB模式、宽巷和窄巷模糊度的处理,以及整数钟和非组合bia产品的使用。重点强调了数据质量和控制的重要性,以及在不同阶段可能出现的问题和解决策略。此外,还提到了MG-APP软件在模糊度固定中的应用,并分享了使用不同数据源进行模糊度固定的效果。
本文详细介绍了GPS模糊度固定的过程,包括FCB模式、宽巷和窄巷模糊度的处理,以及整数钟和非组合bia产品的使用。重点强调了数据质量和控制的重要性,以及在不同阶段可能出现的问题和解决策略。此外,还提到了MG-APP软件在模糊度固定中的应用,并分享了使用不同数据源进行模糊度固定的效果。
当前模糊度固定方法
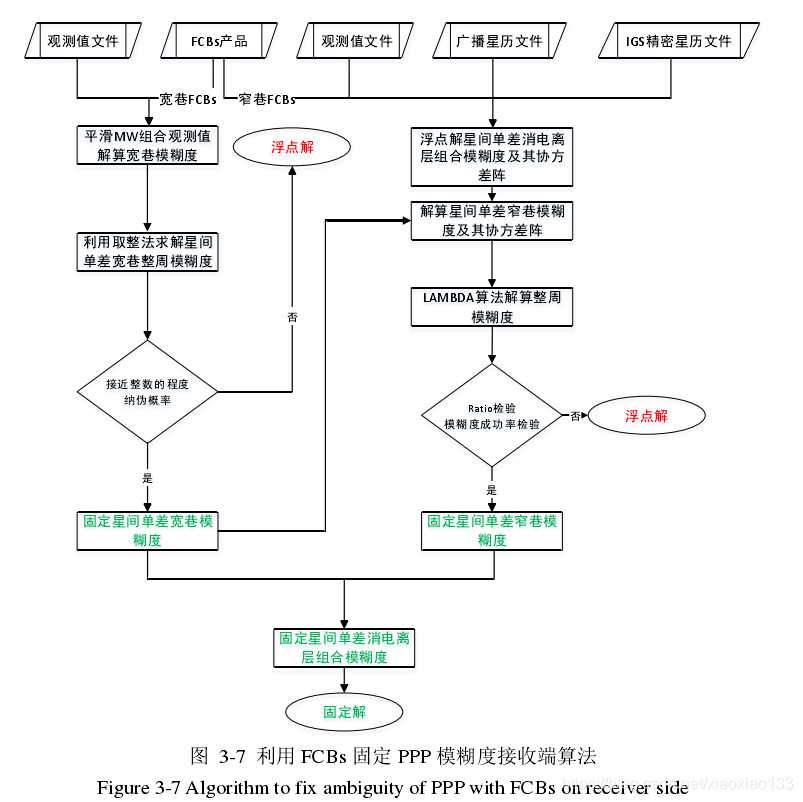
- FCB模式:非差消电离层模糊度解出来,选择一个参考星组合成星间单差。然后分解宽巷改正宽巷偏差,hatch平滑固定。浮点单差减去宽巷偏差得到浮点窄巷(需要改正窄巷偏差),最后固定了星间单差模糊度,求出固定浮点消电离层模糊度,然后带回方程约束求解
- 整数钟

(以上模糊度固定流程图来源于—马效申硕士论文《模糊度固定 PPP 与 INS组合定位研究》)
质量控制
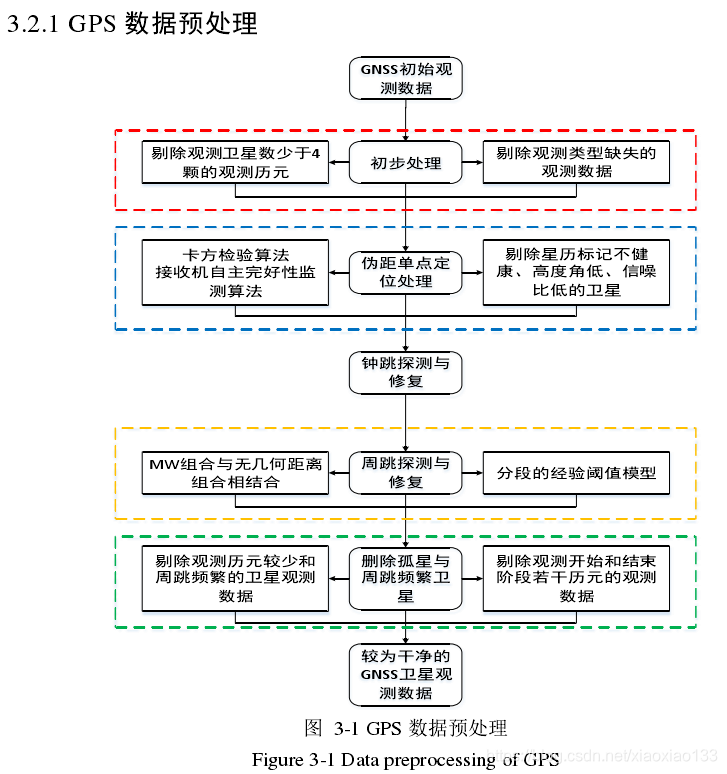
(以上GPS数据预处理流程图来源于马效申硕士论文《模糊度固定 PPP 与 INS组合定位研究》)
模糊度固定需要注意点
下面讨论的模糊度,宽窄巷等都是星间单差模糊度。
- grg、FCB等产品一定要用P1码或者C1+P1C1改正,不要用C1码,这样宽巷5分钟所有卫星就可以小于0.25周。
- 至于窄巷是个难点:
1、保证浮点解PPP模糊度精度(与解算产品时候模型接近或一致)。
2、当PPP滤波稳定后窄巷浮点模糊度绝大多数接近整数说明固定流程计算正确。
3、FCB存储的宽巷(86cm)和窄巷(10.7cm)的周单位产品。FCB固定窄巷没区别只是窄巷固定后还原浮点模糊度方式不太一样,下面用示意代码展示还原过程,注意星间单差FCB( SDnl_FCB )。使用FCB产品这一条很重要!!!
double SDnl_FCB = (oneSat.nl_FCB - refSat.nl_FCB);// 单差窄巷FCB(单位:周)
double Nwl_fix = oneSat.SD_WL_int, N1_fix = oneSat.SD_NL_int + SDnl_FCB;// 注意固定的窄巷要加上单差窄巷FCB(单位:周)
double AmbLCFixed = ((M_C*F2/(F1*F1 - F2*F2))*Nwl_fix + (M_C/(F1+F2))*N1_fix)/lamdaIF;//还原固定的浮点模糊度(单位:周)
4、对于非组合bia产品需要改正到对应的观测值上面,如果用的C1C改正,此时不要在用P1C1的DCB再把C1C码改成C1W码。非组合bia产品也可以组合消电离层模式进行模糊度固定。
5、使用整数钟产品不需要IGS的钟差改正到伪距上,因为伪距影响较小。虽然整数钟与IGS伪距钟差异10-20m但伪距权影响很小,也可以不使用。
6、窄巷在坐标误差大于10cm很难固定,需要寻找新方法。
7、固定窄巷协方差矩阵是个关键因素,选择高度角最大的卫星作为参考星可以lamda进行LD分解计算ratio。但是使用轮换星策略经常会无法LD分解,导致无法进行lamda搜索。所以我选择了固定参考星策略(这是我个人遇到的问题,可能别人没有)。
模糊度固定产品下载
-
grg下载:ftp://ftpsedr.cls.fr/pub/igsac/
里面*.wsb存了每天的GPS或者Gaileo卫星的宽巷偏差。不过只有GPS的宽巷
grg也可以在CDDIS下载:ftp://cddis.gsfc.nasa.gov/pub/gps/products/2048/下载
也可以在ftp://igs.gnsswhu.cn/pub/gps/products/2048/ -
WUM的FCB下载:
武汉大学提供的FCB产品:https://github.com/FCB-SGG/FCB-FILES/ 模糊度固定需要对应的fcb文件(例如gbm的sp3和clk使用 sgg20145_gbm.fcb)
最新的FCB下载(新格式): http://igmas.users.sgg.whu.edu.cn/products/download/directory/products//upd -
WUM的相位钟下载:
武汉大学提供的相位钟/偏差产品: ftp://igs.gnsswhu.cn/pub/whu/phasebias/ 模糊度固定需要下载CODE的sp3,武大提供的clk(相位钟差)和bia(宽巷偏差)
PRIDE Lab homepage: http://pride.whu.edu.cn -
CNES后处理数据下载:
http://www.ppp-wizard.net/products/POST_PROCESSED/ 模糊度固定需要下载sp3,clk和bia
所需要的GBM产品下载ftp://ftp.gfz-potsdam.de/GNSS/products/mgex/2098 -
CNES实时产品下载:
http://www.ppp-wizard.net/products/REAL_TIME/ 模糊度固定需要下载sp3,clk和bia -
DCB使用CODE产品(网速有点慢):ftp://ftp.aiub.unibe.ch/CODE/2020
使用MG-APP固定模糊度目前结果如下
- 星间单差(PPP求解每颗卫星浮点模糊度,选择参考星做差得出单差浮点模糊度)宽巷和窄巷分布图(接近整数分布=WL-round(WL)) 浮点解减去四舍五入数值。下面实验数据用的NNOR测站,grg开头的sp3和clk文件。结果如下图:




下面又对ALGO测站进行固定,坐标效果图如下:

 下面又对JFNG测站进行固定,坐标效果图如下:
下面又对JFNG测站进行固定,坐标效果图如下:


简洁知识点
-
消电离层组合模糊度分解成宽巷(WL)和窄巷(NL)。
AmbIF = (0.3774825111*WL + 0.106953378*NL)/0.1902936728
NL = (AmbIF*0.1902936728 - 0.3774825111*WL)/0.106953378其中0.1902936728是GPS的L1波长(注意:也是消电离层组合的波长), 0.106953378是窄巷波长。
-
专业名词
uncalibrated phase delay: UPD
-
事后PPP-float & 事后PPP-AR
24h静态PPP-float ENU-RMS: 2.85, 1.68, 5.68 mm,
24h静态PPP-AR ENU-RMS: 1.43, 1.59, 5.31 mm.24h动态PPP-float ENU-RMS: 1.08, 0.92, 2.51 cm,
24h动态PPP-AR ENU-RMS: 0.77, 0.83, 2.32 cm (mean fixing rate of 98.36%)数据来源:PRIDE PPP‑AR: an open‑source software for GPS PPP ambiguity resolution
说明
目前MG-APP软件可以使用grg、gbm_bia、FCB产品按照实时模式滤波做模糊度固定,CNT产品正在测试中。MG-APP具备了基本的PPPAR功能,但是再数据处理质量控制方面还有很多不足,观测数据质量不高就会引起固定失败,卫星变化也会引起mm级别的跳动,因此还需要进一步优化处理,有关问题可以评论。
如果你也关注MG-APP软件的功能的进展,请在Github给我们一个Star。
https://github.com/XiaoGongWei/MG_APP

如有关于本博客的不足之处或者建议请在下面评论留言。
附录:
FCB产品、CNES的事后处理bia产品、CNES的实时产品cnt,固定模糊度如下,分别是坐标误差,每颗卫星宽巷、窄巷小数周数:



图1. 上图是FCB-gbm产品固定模糊度,中图是CNES的事后处理bia产品固定模糊度,下图是CNES的实时产品cnt的bia(虚线是浮点PPP,加深的颜色是固定的PPP)


 图2. 上图是FCB-gbm产品宽巷,中图是CNES的事后处理bia宽巷,下图是CNES的实时产品cnt的bia宽巷
图2. 上图是FCB-gbm产品宽巷,中图是CNES的事后处理bia宽巷,下图是CNES的实时产品cnt的bia宽巷
宽巷在第1000个历元左右发生了问题,也导致下面的窄巷也在第1000历元左右难以固定。因此看了一下1000历元的载波残差和伪距残差如下两个图

 可能还是数据质量没有得到很好地控制,前期载波残差很小,因此宽巷和窄巷都能很好收敛固定,后面载波残差很大因此出现了问题。
可能还是数据质量没有得到很好地控制,前期载波残差很小,因此宽巷和窄巷都能很好收敛固定,后面载波残差很大因此出现了问题。



图3. 上图是FCB-gbm产品窄巷,中图是CNES的事后处理bia窄巷,下图是CNES的实时产品cnt的bia窄巷
感觉宽、窄巷收到数据质量问题影响较大,还有很多内容需要继续优化。有问题可以在评论区讨论!!!
使用实时数据流固定模糊度
初步使用CNES的CLK93对IGS的BRST测站进行静态PPPAR,GPST:2020.10.07 3:50:00 - 2020.10.07 6:01:00
 上图可能数据问题导致1小时并未固定,逐渐误差收敛到5cm左右开始固定。
上图可能数据问题导致1小时并未固定,逐渐误差收敛到5cm左右开始固定。
使用CLK93在BRST测站进行PPPAR。N和U方向固定后效果不明显,效果主要体现在E方向,下面是部分截图(虚线是实时PPP消电离层结果,圆圈是实时PPPAR结果):



自洽的大气产品(电离层+对流层)对PPP影响

图像来源:An Open-source PPP Client Implementation for the CNES PPP-WIZARD Demonstrator
专有名词
- UPD存在于卫星端和接收机端,并且比较稳定能够被估计。模糊度固定解算的坐标精度,在东方向与IGS周解产品提高了30%。
但是文章并未提及PPPAR能够加速收敛时间的问题(快速收敛)。我自己也认为PPPAR能够在东方向大幅度提升精度。如果收敛指标NEU同时小于0.1m将不能提高收敛时间,若收敛指标是3~5cm有可能提高收敛时间(论文经验:5cm才能参与PPPAR,只有进入5cm才能有效利用PPPAR)
以上结论来源于: Ge M , Gendt G , Rothacher M , et al. Resolution of GPS carrier-phase ambiguities in Precise Point Positioning (PPP) with daily observations[J]. Journal of Geodesy, 2008, 82(7):389-399.


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











