










文章目录
欧拉角(Euler)
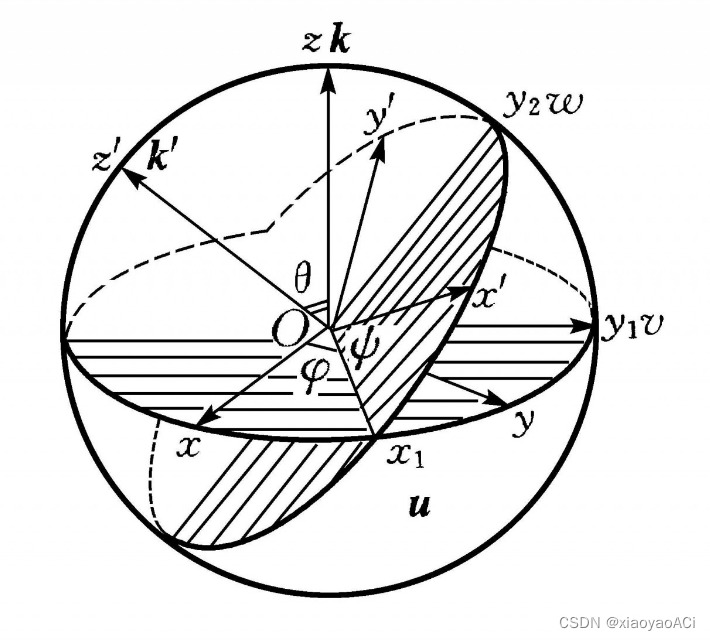
什么是欧拉角?百科上是这样解释的:用来确定定点转动刚体位置的3个一组独立角参量,由章动角θ、旋进角(即进动角)ψ和自转角φ组成,为欧拉首先提出而得名。
很难理解吧?其实我们没有必要把欧拉角想得太复杂。
对于开发者来说,欧拉角就是用一个Vector3变量来记录物体沿着x、y、z轴的旋转。注意,虽然这是一个Vector3变量,但它并不是向量,这个变量的x、y、z三个分量是用来描述旋转的。
欧拉角特点:
- 使用3个角度来保存方位。
- x 与 z沿自身坐标旋转,y 沿世界坐标旋转。
- API:Vector3 eulerAngle = this.transform.eulerAngles;
万向节
万向节,也叫平衡环架(Gimbal),具有枢纽的装置,使得一物体能以单一轴旋转。由彼此垂直的枢纽轴所组成的一组三只平衡环架,则可使架在最内的环架的物体维持旋转轴不变。常常应用于船上的陀螺仪、罗盘、饮料杯架等。
在飞行器的航行中,进行XYZ三个方向旋转的旋转有专业的术语,见下图:
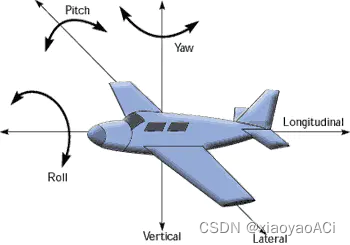
沿着机身右方轴(Unity中的+X)进行旋转,称为pitch,中文叫俯仰。
沿着机头上方轴(Unity中的+Y)进行旋转,称为Yaw,中文叫偏航。
沿着机头前方轴(Unity中的+Z)进行旋转,称为Roll,中文叫桶滚。
欧拉角旋转特性
欧拉角的旋转就是沿着万向节的轴旋转的。目前人类最常用也最容易理解的方式是先沿着X轴旋转,再沿着Y轴旋转,最后沿着Z轴旋转,最后达到目标旋转角度。如下图所示:
这时候可能就有人会有疑问了,为什么不能三个轴同时旋转呢?
实际上,如果三个轴同时旋转,将会无法达到你预期的旋转效果。为什么呢?因为物体是一个整体,当某一个轴进行旋转时,其他的轴是跟着物体一起动的,如果还是按照原来的旋转角度旋转则会随着其他轴的转动形成偏移,如下图所示:
我们想要的其实只是让箭头指向我们,但三个轴同时旋转却使这个旋转轨迹划出了一个不应该有的弧线。
所以我们要了解的是,欧拉旋转是一定要有顺序的。这样的问题其实是无法避免的,但是我们可以根据物体的旋转情况对此进行优化,这个优化的方法就是给三个轴指定一个新的层级顺序。
当然这并不是真正的解决了问题,只是尽量避免了问题而已。欧拉角的问题是无法彻底解决的,
欧拉角优点
- 仅使用三个数字表达方位,占用空间小。
- 沿坐标轴旋转的单位为角度,符合人类思考方式。
- 任意三个数字都是合法的,不存在不合法的欧拉角。
欧拉角缺点
方位的表达方式不唯一
对于一个方位,存在多个欧拉角描述,因此无法判断多个欧拉角代表的唯一是否相同。
例如:
- 角度 0, 5, 0 与角度 0, 365, 0
- 角度 0, -5, 0 与角度 0, 355, 0
- 角度 250, 0, 0 与角度 290, 180, 180
为了保证任意方位都只有独一无二的表示,Unity引擎限制了角度范围,即沿x轴旋转限制在 -90 ~ 90 之间,沿 y 与 z 轴旋转限制在 0 ~ 360 之间。
万向节锁(Gimbal Lock)
当物体沿 x 轴旋转
±
90
°
\ \plusmn 90°
±90° ,自身坐标系z轴与世界坐标系y轴将重合,此时再沿y轴或z轴旋转时,将会失去一个自由度。
Unity的优化方案:在万向节死锁的情况下,规定沿z轴完成绕竖直轴的全部旋转,即此时y轴旋转为0。
关于万向节锁的讲解视频:https://v.youku.com/v_show/id_XNjk1MTkzMTM2.html#paction
在使用欧拉旋转的情况下,万向节锁的情况是无法避免的,为了更好的表示旋转,Unity引入了四元数的概念。
四元数(Quaternion)
四元数在3D图形学中代表旋转,由一个三维向量 / [ x , y , z ] / [x, y, z] /[x,y,z] 和一个标量 / w / w /w 组成。
旋转轴为
V
V
V ,旋转弧度为
θ
\theta
θ ,若使用四元数表示,则四个分量为:
x
=
S
i
n
(
θ
/
2
)
∗
V
.
x
y
=
S
i
n
(
θ
/
2
)
∗
V
.
y
z
=
S
i
n
(
θ
/
2
)
∗
V
.
z
w
=
C
o
s
(
θ
/
2
)
x = Sin(\theta / 2) * V.x \\ y = Sin(\theta / 2) * V.y \\ z = Sin(\theta / 2) * V.z \\ w = Cos(\theta / 2)
x=Sin(θ/2)∗V.xy=Sin(θ/2)∗V.yz=Sin(θ/2)∗V.zw=Cos(θ/2)
四个分量的值都在 -1 到 1 之间。
几何应用:四元数与向量相乘,可以实现向量的旋转。
代码:
// 获取四元数
Quaternion qt = this.transform.rotation;
// 使用四元数做旋转
this.transform.rotation = Quaternion.Euler(0, 50, 0);
// 或者调用Rotation方法实现旋转
this.transform.Rotation(0, 50, 0);
四元数旋转角度相加需要用 * 乘法,而不是加法。
四元数转轴角
Transform 中的 rotation 使用的是四元数,有时我们需要获取 Transform 沿某一个轴旋转的角度,此时可以用下面的代码进行计算:
Quaternion q = transform.rotation;
// 计算X轴旋转角度
float angleX = 0;
float siny_cosp1 = 2 * (q.w * q.x + q.z * q.y);
float cosy_cosp1 = 1 - 2 * (q.y * q.y + q.x * q.x);
float radian1 = Mathf.Atan2(siny_cosp1, cosy_cosp1); // 求出弧度
angleX = radian1 * Mathf.Rad2Deg; // 转化角度
Debug.Log("=============" + angleX);
// 计算Z轴旋转角度
float angleZ = 0;
float siny_cosp2 = 2 * (q.w * q.z + q.x * q.y);
float cosy_cosp2 = 1 -2 * (q.y * q.y + q.z * q.z);
float radian2 = Mathf.Atan2(siny_cosp2, cosy_cosp2); // 求出弧度
angleZ = radian2 * Mathf.Rad2Deg; // 转化角度
Debug.Log("=============" + angleZ);
上述方法适用于物体只在一个轴上做了旋转的情况,Y轴的计算方法以此类推。
四元数优点
避免万向节死锁,完全沿自身轴(而不是全局轴)旋转。
四元数缺点
难于使用,且存在不合法的数值。
Quaternion类
Unity中提供了Quaternion类来处理四元数相关操作,该类的使用方法可以参考我的另外一篇文章:【Unity】Unity常用类:向量Vector3、四元数Quaternion
本文万向节部分内容参考了塞北烟云大神的文章,地址如下:https://www.jianshu.com/p/9f45e91a2391
更多内容请查看总目录【Unity】Unity学习笔记目录整理















 3019
3019

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









