









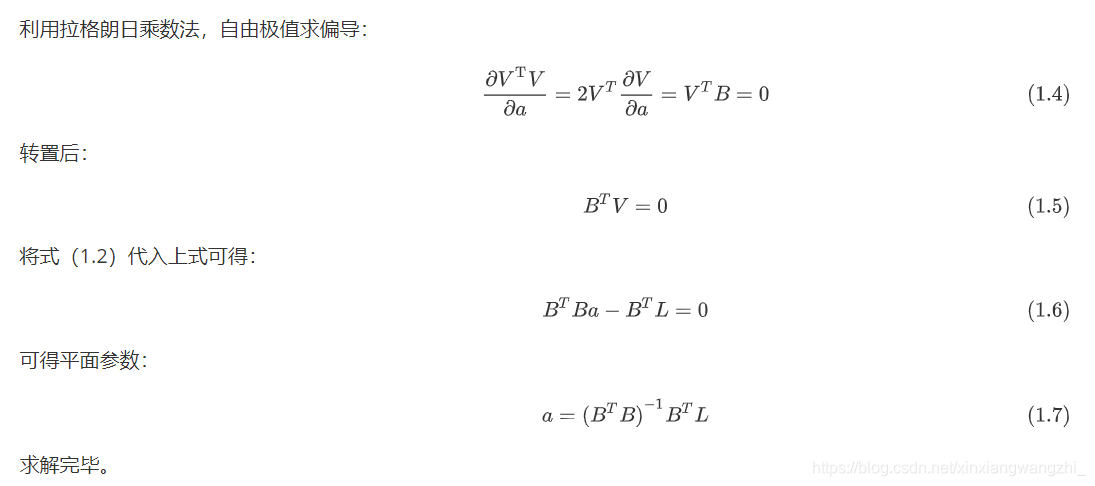
 该博客介绍了使用C++和Eigen库实现线性最小二乘法来拟合平面,包括直接解法和矩阵分解方法(LU、SVD)。通过示例展示了对预设点集和平面点云数据的处理,并验证了算法的正确性。
该博客介绍了使用C++和Eigen库实现线性最小二乘法来拟合平面,包括直接解法和矩阵分解方法(LU、SVD)。通过示例展示了对预设点集和平面点云数据的处理,并验证了算法的正确性。
csdn对latex语法支持不完整啊,太不友好了,那我只好上图片了。我把文档已经上传到csdn了,免积分,链接。
本文采用线性最小二乘直接解法(即对矩阵求逆),当矩阵维度大时,可能耗时比较多,可以采用矩阵分解方法缓解(文中已实现)。也可以把最后一步的求逆求解过程,换成迭代过程,即可变为线性最小二乘的迭代解法(未实现)。

4show the codes
// 10最小二乘拟合平面.cpp : 此文件包含 "main" 函数。程序执行将在此处开始并结束。
//
/********************
作者:xx
时间:2021.06.15
程序功能:c++实现点云最小二乘平面拟合
依赖项:pcl1.9
函数功能:fitPlane()为了验证最小二乘原理的正确性,设平面方程为x+2y+3z+4=0,假设有五个点分别为(-1,0,-1),(-2,-1,0),(0,1,-2),
(-4,3,-2),(3,-2,1),根据五个点求解Ax+By+Cz+D=0
cloudPlane()输入点云实现平面参数与法线输出
注意事项:最小二乘对噪声敏感,请保证数据干净
*********************/
#include <iostream>
#include<string>
#include<stdexcept>
#include <Eigen/Dense>
#include<pcl/io/pcd_io.h>
#include<pcl/point_cloud.h>
#include<pcl/point_types.h>
#include <pcl/console/parse.h>
#include <pcl/filters/filter.h>
#include <pcl/filters/voxel_grid.h>
typedef pcl::PointXYZ pointT;
typedef pcl::PointCloud<pointT> cloud;
void fitPlane(const std::string & decomposition ="lu")
{
//系数矩阵
Eigen::Matrix<double, 5, 3> b_mat;
b_mat(0, 0) = -1;
b_mat(0, 1) = 0;
b_mat(0, 2) = 1;
b_mat(1, 0) = -2;
b_mat(1, 1) = -1;
b_mat(1, 2) = 1;
b_mat(2, 0) = 0;
b_mat(2, 1) = 1;
b_mat(2, 2) = 1;
b_mat(3, 0) = -4;
b_mat(3, 1) = 3;
b_mat(3, 2) = 1;
b_mat(4, 0) = 3;
b_mat(4, 1) = -2;
b_mat(4, 2) = 1;
std::cout <<"系数矩阵:\n"<< b_mat << std::endl;
//列向量
Eigen::Matrix<double, 5, 1> l_mat;
l_mat(0, 0) = -1;
l_mat(1, 0) = 0;
l_mat(2, 0) = -2;
l_mat(3, 0) = -2;
l_mat(4, 0) = -1;
std::cout << "列向量:\n" << l_mat << std::endl;
Eigen::Matrix<double, 3, 1> a_mat;
if (decomposition =="lu")
{
//lu分解求逆,对于大型矩阵加速。
a_mat = ((b_mat.transpose() * b_mat)).lu().solve(b_mat.transpose() * l_mat);
}
else if (decomposition == "svd")
{
//SVD结果稳定特别是对于矩阵接近病态,但速度慢。
a_mat = ((b_mat.transpose() * b_mat)).bdcSvd(Eigen::ComputeThinU | Eigen::ComputeThinV).solve(b_mat.transpose() * l_mat);
}
else
{
//直接解法
a_mat = (b_mat.transpose() * b_mat).inverse() * b_mat.transpose() * l_mat;
}
std::cout << decomposition << "平面方程系数:a0,a1,a2:\n"<<a_mat << std::endl;
}
bool cloudPlane(const cloud::Ptr &cloud_origin, Eigen::Matrix<double, 3, 1> &aa_mat, const std::string& decomposition = "lu", const bool& downsample = false)
{
//点云拟合平面
cloud::Ptr cloud_in(new cloud);
//************实例验证***********
//cloud_in->points.push_back(pointT(-1, 0, -1));
//cloud_in->points.push_back(pointT(-2, -1, 0));
//cloud_in->points.push_back(pointT(0, 1, -2));
//cloud_in->points.push_back(pointT(-4, 3, -2));
//cloud_in->points.push_back(pointT(3, -2, -1));
//cloud_in->height = 1;
//cloud_in->width = 5;
//cloud_in->resize(5);
//************实例验证***********
//去除nan点
std::vector<int> indices;
pcl::removeNaNFromPointCloud(*cloud_origin, *cloud_in, indices);
//下采样,加快拟合速度,一般不需要这么多点,可选
if (downsample)
{
pcl::VoxelGrid<pointT> sor;
sor.setInputCloud(cloud_in);
sor.setLeafSize(0.01f, 0.01f, 0.01f);
sor.filter(*cloud_in);
}
//最小二乘平面拟合
std::size_t cloud_size = cloud_in->points.size();
std::cout << "方程个数:"<<cloud_size << std::endl;
try
{
if (cloud_size < 3)//小于三个点无法计算
{
throw std::runtime_error("方程个数少于未知量个数,请检查数据");
}
}
catch (std::runtime_error err)
{
std::cerr << err.what() << std::endl;
return false;
}
Eigen::MatrixXd B;
B.resize(cloud_size, 3);
Eigen::MatrixXd L;
L.resize(cloud_size, 1);
for (size_t row = 0; row < cloud_size; ++row)
{
B(row, 0) = cloud_in->points[row].x;
B(row, 1) = cloud_in->points[row].y;
B(row, 2) = 1;
L(row, 0) = cloud_in->points[row].z;
}
if (decomposition == "lu")
{
aa_mat = ((B.transpose() *B)).lu().solve ( B.transpose() * L);
}
else if (decomposition == "svd")
{
aa_mat = ((B.transpose() * B)).bdcSvd(Eigen::ComputeThinU | Eigen::ComputeThinV).solve(B.transpose() * L);
}
else
{
aa_mat = (B.transpose() * B).inverse() * B.transpose() * L;
}
std::cout <<decomposition<< "点云平面拟合结果\n" << aa_mat << std::endl;
return true;
}
int main()
{
std::cout << "***********一般最小二乘平面拟合实验:************\n";
fitPlane("svd");
std::cout << "**************点云平面拟合实验:**************\n";
cloud::Ptr cloud_in(new cloud);
Eigen::Matrix<double, 3, 1> aa_mat;
if (pcl::io::loadPCDFile<pointT>("plane.pcd", *cloud_in) < 0)
{
PCL_ERROR("点云文件读取失败");
}
else
{
std::cout << "点云数量:" << cloud_in->size() << std::endl;
if (cloudPlane(cloud_in, aa_mat, "lu"))
{
std::cout << "平面对应的法向量:\n"
<< -aa_mat(0, 0) << " " << -aa_mat(1, 0) << " " << 1 << std::endl;
}
}
std::cout << "Hello World!\n";
}
5结果
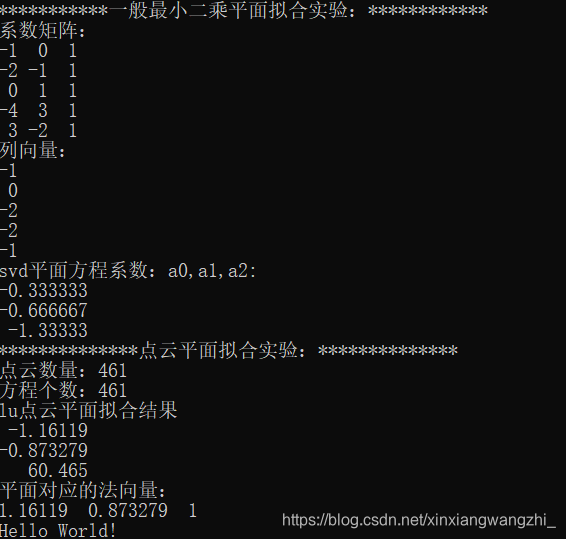
可以发现:
fitPlane函数与假设值一致,验证了理论和程序的正确性。
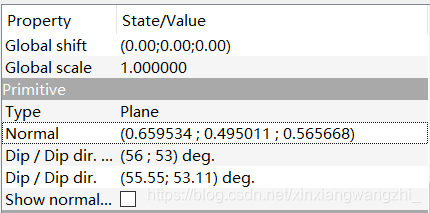
对于cloudPlane函数计算的法向量结果与CC拟合得到的结果对比:可以发现法向量结果几乎一致,验证了程序的正确性。

















 5066
5066

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









