







使用ROS强大的机器人功能,建立ROS可以识别的机器人模型是第一步,也是无法绕过去的环节.ROS通过URDF(UnifiedRobot Description Format) 就是描述机器人硬件尺寸布局.它是同ROS沟通的渠道,有了机器人的物理尺寸,ROS就可以有效的进行Navagation和碰撞检测(collision detect)了。
Unified Robot Description Format,统一机器人描述格式,简称为URDF。ROS中的urdf功能包包含一个URDF的C++解析器,URDF文件使用XML格式描述机器人模型。必须承认,URDF 是个很难懂的语言,但有RViz的强大仿真功能,我们很容易调试它。
一,软件环境
OS:Ubuntu 15.10
ROS:Kinetic Full package二.基础模型
创建工作空间,在src下创建beginner_tutorials功能包(见相关ROS基础入门)
1.创建ros package命名为beginner_tutorials
catkin_create_pkg my_robot std_msgs rospy roscpp urdf2.建立文件夹launch和urdf分别用来存放.launch文件和.urdf文件
3.建立urdf文件
在beginner_tutorials 文件夹下建立urdf文件夹,创建机械臂的描述文my_robot.urdf,描述代码如下:
<robot name="my_robot">
<link name="link1" />
<link name="link2" />
<link name="link3" />
<link name="link4" />
<joint name="joint1" type="continuous">
<parent link="link1"/>
<child link="link2"/>
</joint>
<joint name="joint2" type="continuous">
<parent link="link1"/>
<child link="link3"/>
</joint>
<joint name="joint3" type="continuous">
<parent link="link3"/>
<child link="link4"/>
</joint>
</robot>上边的URDF模型定义了机器人的4个环节(link),然后定义了三个关节(joint)来描述环节之间的关联。
ROS为用户提供了一个检查URDF语法的工具:
sudo apt-get install liburdfdom-tools安装完毕后,执行检查:
check_urdf my_robot.urdf出现错误:
Error: Error document empty.
at line 72 in /build/buildd/urdfdom-0.2.10+dfsg/urdf_parser/src/model.cpp
ERROR: Model Parsing the xml failed解决:
check_urdf /home/daniel/catkin_ws/src/beginner_tutorials/urdf/my_robot.urdf然后正常显示:
robot name is: my_robot
---------- Successfully Parsed XML ---------------
root Link: link1 has 2 child(ren)
child(1): link2
child(2): link3
child(1): link4
三 . 添加机器人尺寸
在基础模型之上,我们为机器人添加尺寸大小。由于每个环节的参考系都位于该环节的底部,关节也是如此,所以在表示尺寸大小时,只需要描述其相对于连接的关节的相对位置关系即可。urdf中的域就是用来表示这种相对关系。(定义每个link所在位置)
为所有关节应用尺寸:
<robot name="my_robot">
<link name="link1" />
<link name="link2" />
<link name="link3" />
<link name="link4" />
<joint name="joint1" type="continuous">
<parent link="link1"/>
<child link="link2"/>
<origin xyz="5 3 0" rpy="0 0 0" />
</joint>
<joint name="joint2" type="continuous">
<parent link="link1"/>
<child link="link3"/>
<origin xyz="-2 5 0" rpy="0 0 1.57" />
</joint>
<joint name="joint3" type="continuous">
<parent link="link3"/>
<child link="link4"/>
<origin xyz="5 0 0" rpy="0 0 -1.57" />
</joint>
</robot>
例如,joint2相对于连接的link1在x轴和y轴都有相对位移,而且在z轴上还有90度的旋转变换,所以表示成域的参数就如下所示:
<origin xyz="-2 5 0" rpy="0 0 1.57" />四.添加运动学参数
如果我们为机器人的关节添加旋转轴参数,那么该机器人模型就可以具备基本的运动学参数。
例如,joint2围绕正y轴旋转,可以表示成:
<axis xyz="0 1 0" />同理,joint1的旋转轴是:
<axis xyz="-0.707 0.707 0" />
应用到我们的URDF中:
<robot name="my_robot">
<link name="link1" />
<link name="link2" />
<link name="link3" />
<link name="link4" />
<joint name="joint1" type="continuous">
<parent link="link1"/>
<child link="link2"/>
<origin xyz="5 3 0" rpy="0 0 0" />
<axis xyz="-0.9 0.15 0" />
</joint>
<joint name="joint2" type="continuous">
<parent link="link1"/>
<child link="link3"/>
<origin xyz="-2 5 0" rpy="0 0 1.57" />
<axis xyz="-0.707 0.707 0" />
</joint>
<joint name="joint3" type="continuous">
<parent link="link3"/>
<child link="link4"/>
<origin xyz="5 0 0" rpy="0 0 -1.57" />
<axis xyz="0.707 -0.707 0" />
</joint>
</robot>
然后使用check_urdf检查语法错误。
五 . 图形化显示URDF模型
我们现在已经完成了一个简单的URDF模型创建,ROS提供了相应的工具可以让URDF图像化显示出来。
urdf_to_graphiz /home/daniel/catkin_ws/src/my_robot/urdf/my_robot.urdf然后打开生成的pdf文件,即可看到图形化的urdf:
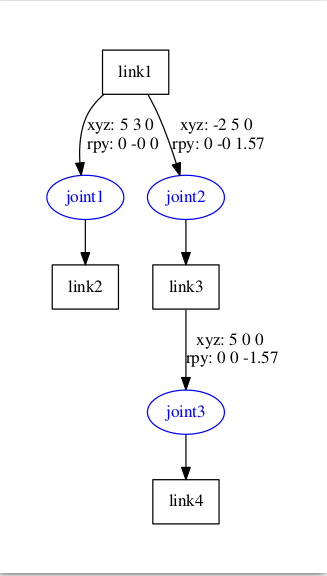
六. 创建display.launch文件
该文件可以帮助启动RViz来观察机器人。其中有三个node,一个是rviz,另外两个joint_state_publisher robot_state_publisher是必须的node。
第一个输入参数 model 就是要启动的urdf文件路径。
第二个输入参数 gui 指定是否启用关节转动控制面板窗口。
<launch>
<arg name="model" />
<arg name="gui" default="False" />
<param name="robot_description" textfile="($find my_robot)/urdf/my_robot.urdf)" />
<param name="use_gui" value="$(arg gui)"/>
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" />
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find urdf_tutorial)/urdf.rviz" required="true" />
</launch> link可以指定许多属性:
定义惯性
定义一个link的外观,大小,颜色和材质纹理贴图
定义碰撞检测属性
我们详细看一下的定义:
定义了几何形状为一个立方体,三个参数分别为长宽高,单位是米(m). 这里我们指定下层小车板子的板的尺寸。可以有好几个选项: 立方体 圆柱体 球体
指定颜色rgb和透明度a. 它们取值范围都是[0,1] 区间。
切换到launch文件夹下,
使用下面命令启动rviz来查看我们刚刚完成的机器人模型:
roslaunch urdf_tutorial display.launch model:=urdf/my_robot.urdf
















 1663
1663











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











