







虚拟机VMware10.0+Ubuntu14.04点击打开链接
参考这个人的博客:
http://blog.csdn.net/u013142781/article/details/50529030
目前已经没有14.04链接了,大家可以点击先点击的这个参考链接
http://releases.ubuntu.com/14.04/
VMware用的版本是10.0
安装好之后
当然就是设置成中文啦
然后安装VMtool 这个在我前面有一篇博客中有写大家可以去找找
然后如果需要扩容这个也在我前面的一篇博客中,实在找不着的话大家可以给我留言
写这篇博客主要是为了在说明一下在安装OpenCV和openNI 中走过的弯路,希望大家不要走
然后不要用易科机器人的镜像,因为你也不知道他是怎么设置的,我就是个openjdk-7-jdk的一个玩意没装好。以我目前水平不可能解决这个问题,还不如像学姐那样找个干净的镜像,然后需要什么自己去配置就好了。
当然,写这篇博客主要是对高博的一起做RGB-D slam 的一个总结
链接:http://www.cnblogs.com/gaoxiang12/p/4633316.html 中间走过不少弯路希望大家共勉
如果大家有在安装过程中有什么问题,欢迎留言。也希望大家都能够跟我一步一步这样安装,不然有的问题真是不好处理。
1、重启可能会遇到没有办法启动的问题。这个时候重启启动客户端,然后重启一下就可以,不用担心
2、进去之后可能会遇到分辨率不对的问题。例如:
这个时候需要调节一下屏幕的分辨率
推荐这个分辨率

然后就好了:

如果你和我一样觉得图标太大的话,可以调解菜单栏的缩放比例
安装VMwaretool
参考我这里的博客:http://blog.csdn.net/u013142781/article/details/50529030
跟着你上面这个博客走,不会有太大问题yes
安装opencv
Step 1.
下载OpenCV源代码: http://opencv.org/downloads.html
这个网页打开会比较慢,耐心等等
然后下载2.0版本 for Linux

然后就我会我屏幕当中那个opencv-2.4.13的文件夹
然后打开终端:(必须要添加这个依赖项,建议用14.04的版本,如果是16.01版本,我尝试过,这个地方就会进行报错)
输入
sudo apt-get install build-essential libgtk2.0-dev libjpeg-dev libtiff4-dev libjasper-dev libopenexr-dev cmake python-dev python-numpy python-tk libtbb-dev libeigen2-dev yasm libfaac-dev libopencore-amrnb-dev libopencore-amrwb-dev libtheora-dev libvorbis-dev libxvidcore-dev libx264-dev libqt4-dev libqt4-opengl-dev sphinx-common texlive-latex-extra libv4l-dev libdc1394-22-dev libavcodec-dev libavformat-dev libswscale-dev
- 1
- 1
必须要出现这个图:
把OpenCV解压到下载目录中,用cmake编译再安装.
1、mkdir build
2、cd build
3、cmake ..
4、make
5、sudo make install
- 1
- 2
- 3
- 4
- 5
- 1
- 2
- 3
- 4
- 5
在安装过程中千万不能报错,一报错就有问题,我用16.01版本就是一直在报错
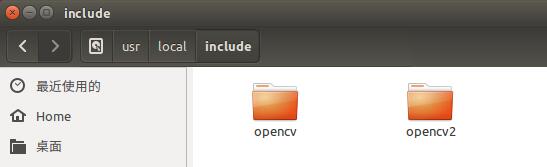
在这个路径下有这两个文件夹说明安装成功
安装PCL
在安装PCL的过程当中
1 sudo add-apt-repository ppa:v-launchpad-jochen-sprickerhof-de/pcl
2 sudo apt-get update
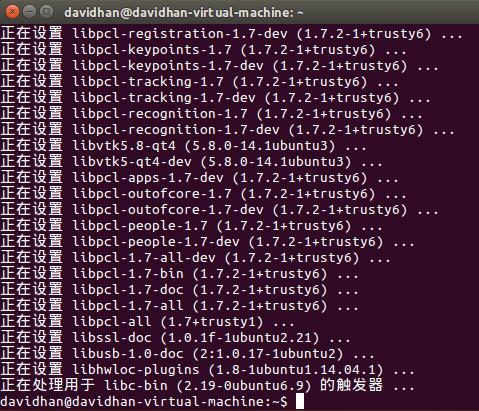
3 sudo apt-get install libpcl-all
- 1
- 2
- 3
- 1
- 2
- 3
安装成功后的截图
安装g2o
参考高博的博客:
http://www.cnblogs.com/gaoxiang12/p/4739934.html
需要注意的地方:

1、千万不要加红框框住的那个依赖项
正确的应该是:
sudo apt-get install libeigen3-dev libsuitesparse-dev libqt4-dev qt4-qmake
- 1
- 1
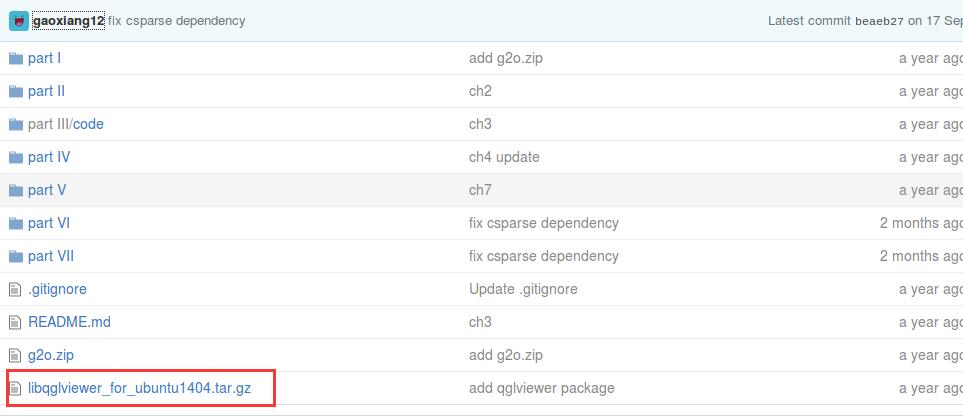
然后先去高博的github上下载:
先用sudo su 启动root权限
再用dpkg -i命令安装:
顺序千万不要乱
第一个安装:libqglviewer-qt4-2_2.3.4-4ubuntu2_amd64.deb
第二个安装:libqglviewer-dev-common_2.3.4-4ubuntu2_all.deb
第三个安装:libqglviewer-qt4-dev_2.3.4-4ubuntu2_amd64.deb
- 1
- 2
- 3
- 4
- 1
- 2
- 3
- 4
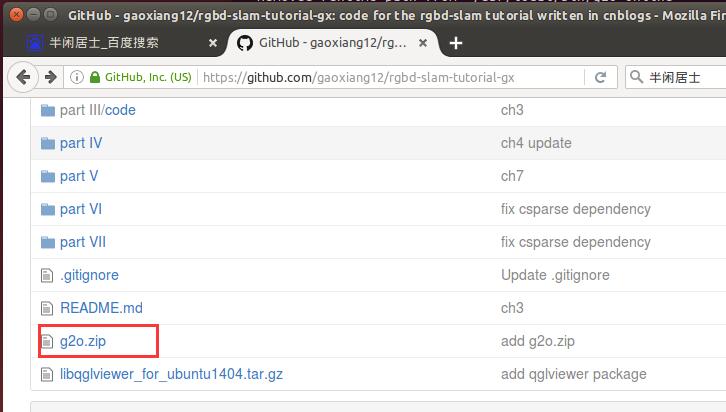
三个弄完以后,再去高博的Git上面把
然后把他解压出来

千万要注意这个地方要要在英文的安装路径下
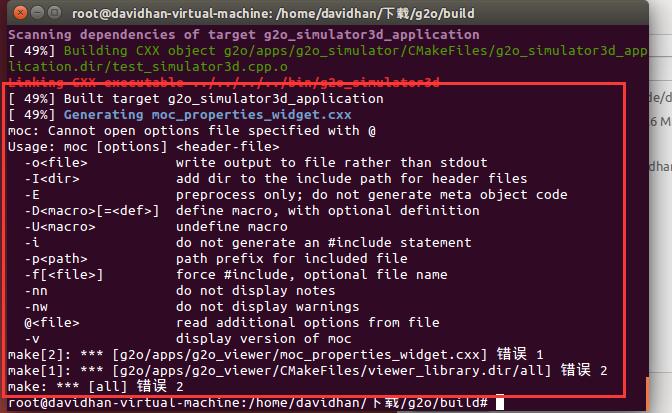
意外情况1、如果是在中文路径的话,就会出现:
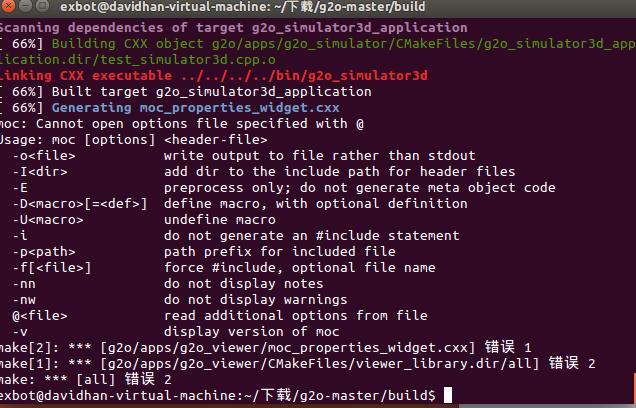
或者
意外情况2、遇到问题千万不要乱说删软件
出现以下报错:
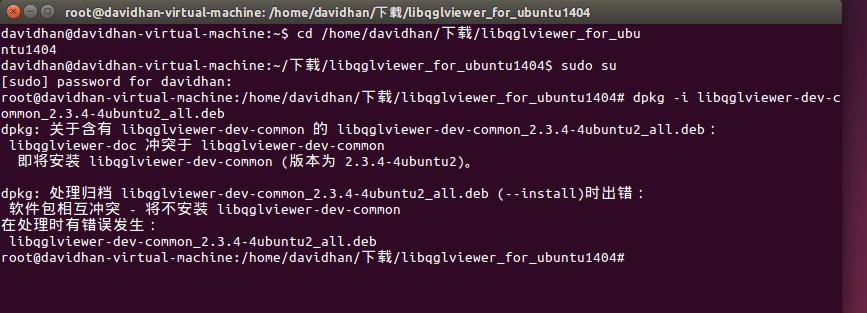
这是因为依赖项冲突,究其本质:是因为你的吧原来的依赖项直接删除了
解决方法:dpkg -r 将那些有冲突的依赖项全都解开,然后重新装
意外情况3、
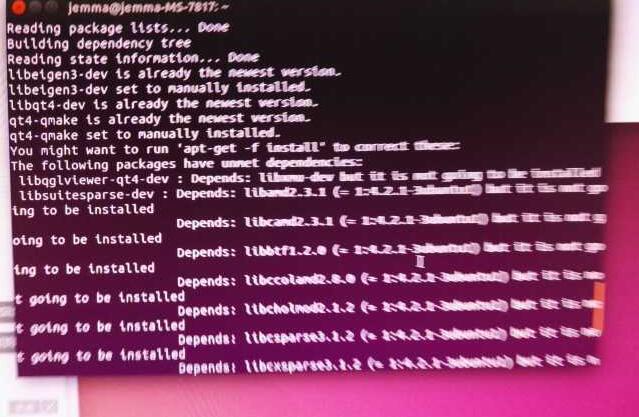
原因:由于先执行了 dpkg -i 那那三个文件,然后执行的
sudo apt-get install libeigen3-dev libsuitesparse-dev libqt4-dev qt4-qmake
- 1
- 1
导致的错误。
用sudo apt-get -f install A B 将报错这A,B两个文件给解除依赖项
解压g2o并编译安装:
进入g2o的代码目录,并:
mkdir build
cd build
cmake ..
make
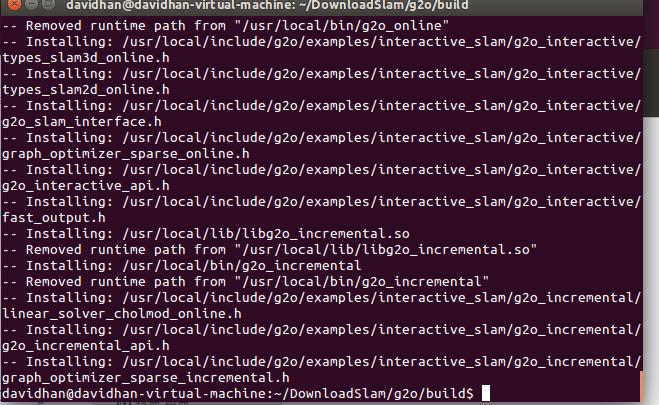
sudo make install
最后只能祝福大家好运了!!
最后make 的时候胜利截图:
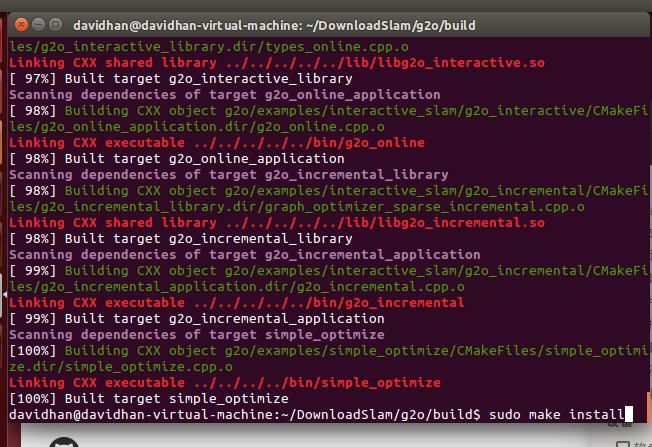
最后记得sudo make install
打完,收工!!!
感谢New Life 大神的帮助!!
安装openNI
参考古月的博客:
http://blog.csdn.net/hcx25909/article/details/8619126
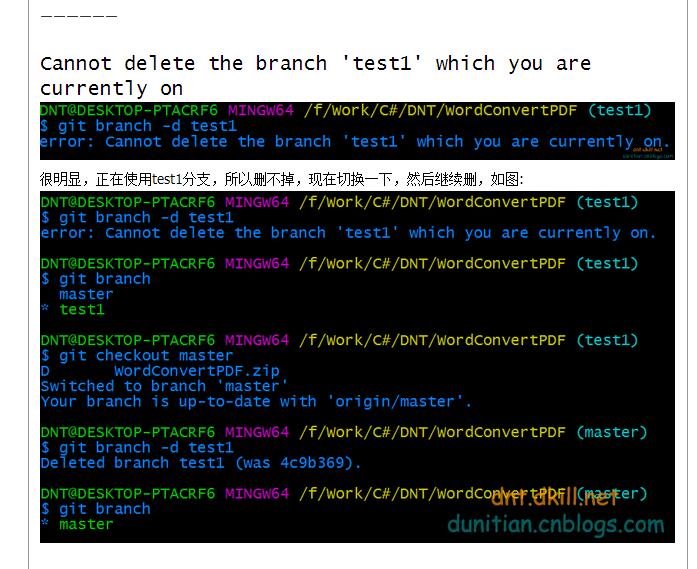
git checkout Unstable-1.5.4.0表示切换到新的分支
目前就现在这里停止吧。我这周的规划是能够把高博程序看懂,能够解释清楚demo
然后那个git 是可以用的,报错也不要管
继续运行
然后让系统出现了linux -64-15什么的包之后,然后再继续安装

安装Pangolin
参考这个人的博客
http://www.cnblogs.com/liufuqiang/p/5618335.html
十分重要的一点: 用make 不用make -j
如果用make-j 的话,会在84%的时候虚拟机直接卡死
在注释代码的时候,你也需要会一点vim 的基础
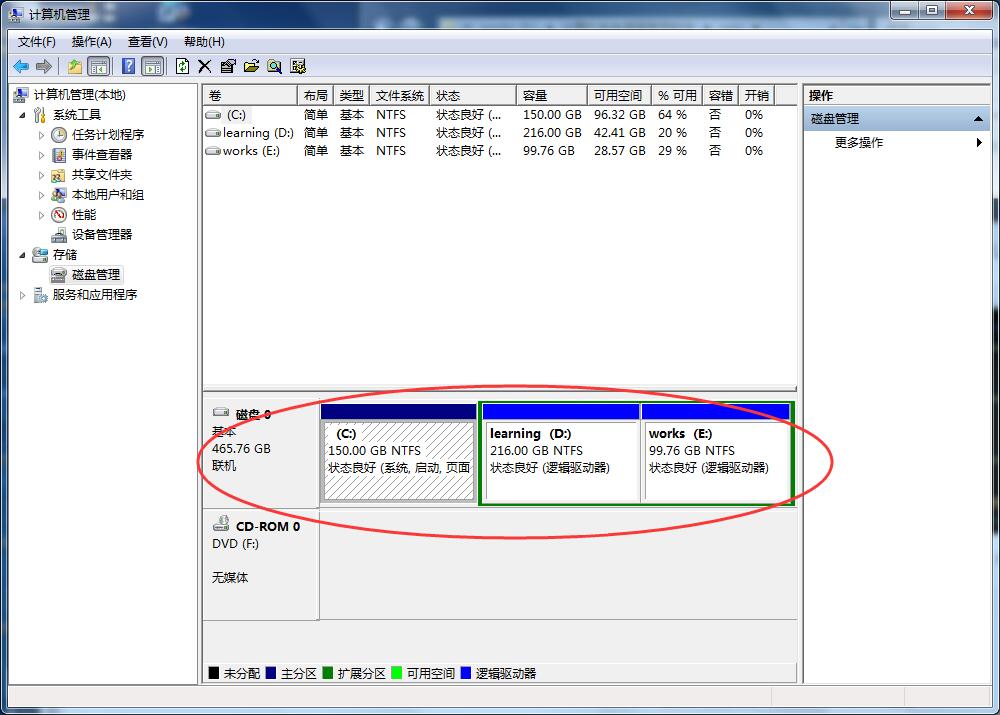
双系统安装过程
首先你要去磁盘管理那里单独分一个区出来给Ubuntu系统。
实测可用的百度经验,就按照上面的步骤走
http://jingyan.baidu.com/article/e4d08ffdace06e0fd2f60d39.html
在分区的地方,每台电脑都不一样,到时候自己懂得变通一下就可以。
如果是这样的话,我只要写(h0,0)就可以。主要就是为了能够让计算机自己找到分区。
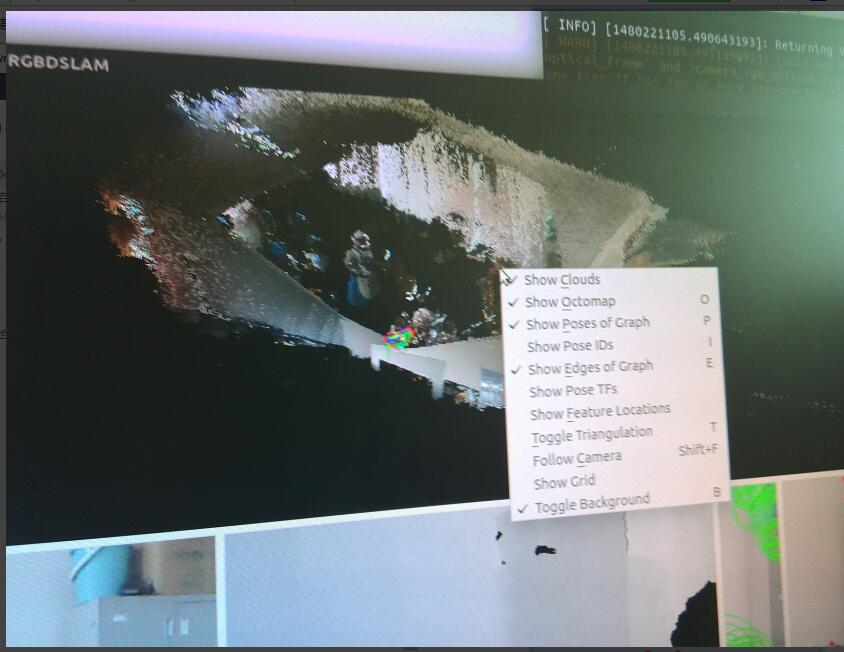
rgbslam v2跑程序实例
http://blog.csdn.net/yangtze_1006/article/details/51606680
在终端运行Ctrl+s表示暂停程序
在显示的QT界面按一下“”空格键“”暂停特征匹配和读取信息
然后运行Ctrl+s保存 Pcd 文件,然后尝试运行ctrl + F 可以另存PCD 文件
目前遇到的问题是
没有办法画出轨迹图,不知道高博说的那个txt文件在哪里
安装DSO
安装时能安装上,数据集也是可以跑通的。但是就是那个实时系统总是没办法跑通
http://blog.csdn.net/heyijia0327/article/details/53173146
安装rviz以及turtlebot虚拟软件
http://www.ncnynl.com/
上面的代码可重复性高
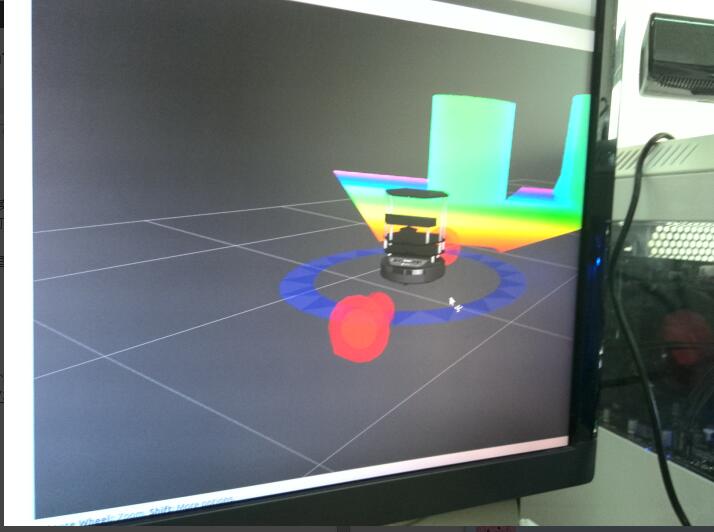
红色箭头用来表示前进,输出的图像是Kinect看到的世界,蓝色的圆盘表示旋转角度
#
将新买的笔记本联想E460 win10 装成 win7 实测可用的过程
http://tieba.baidu.com/p/4325368308















 5619
5619

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









