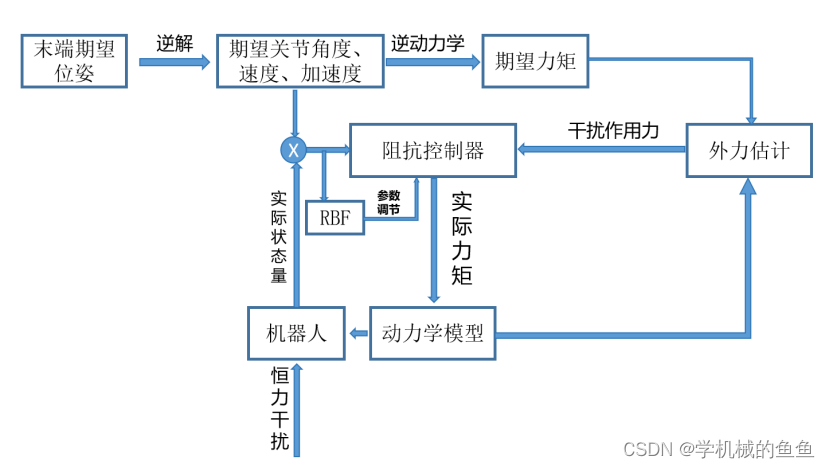
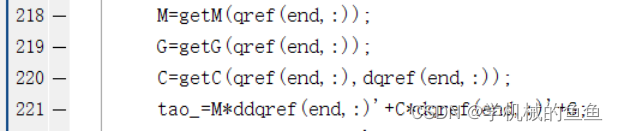
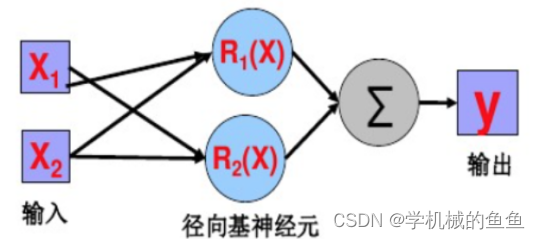
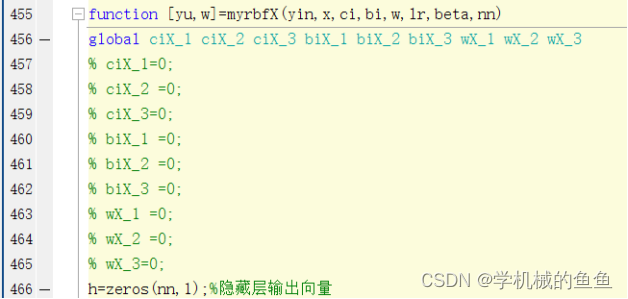
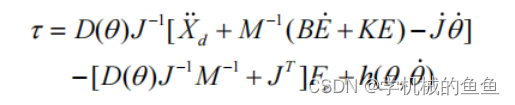
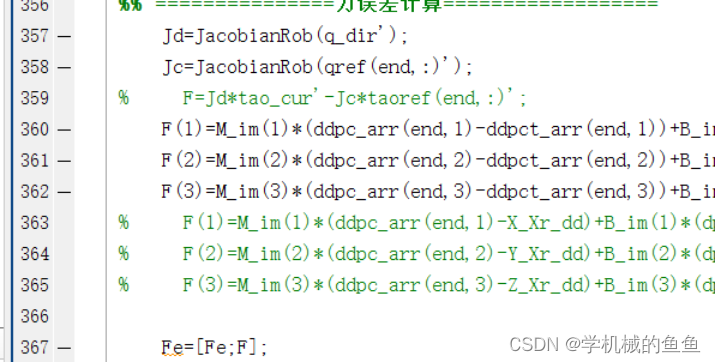
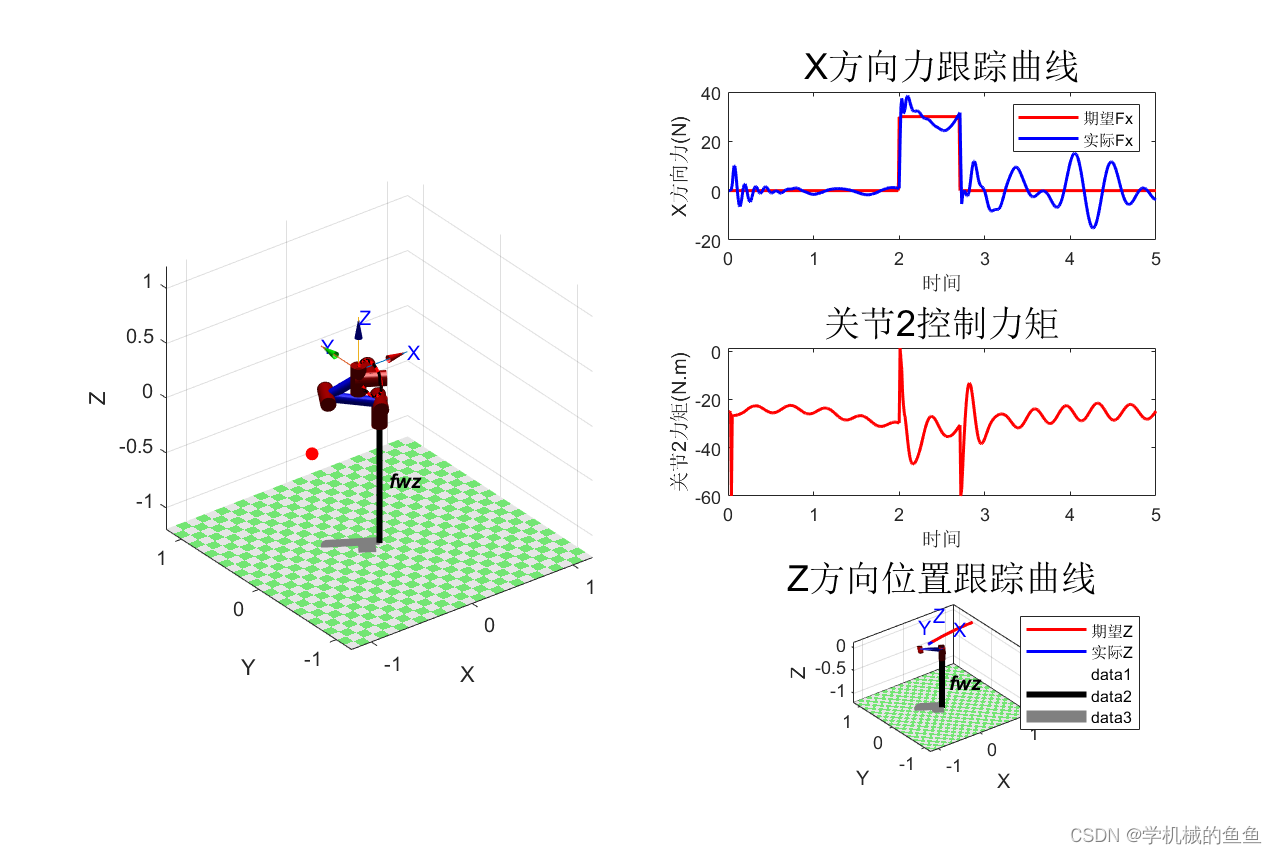
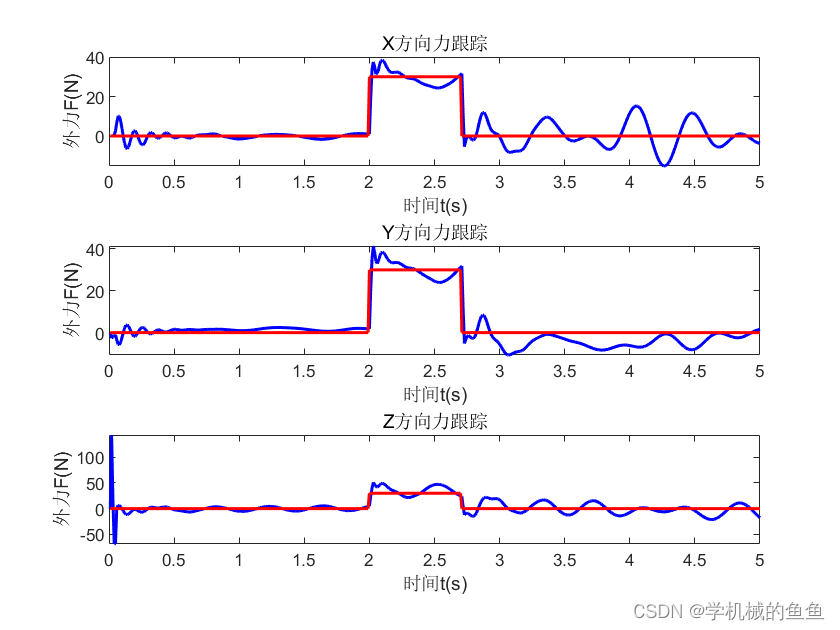
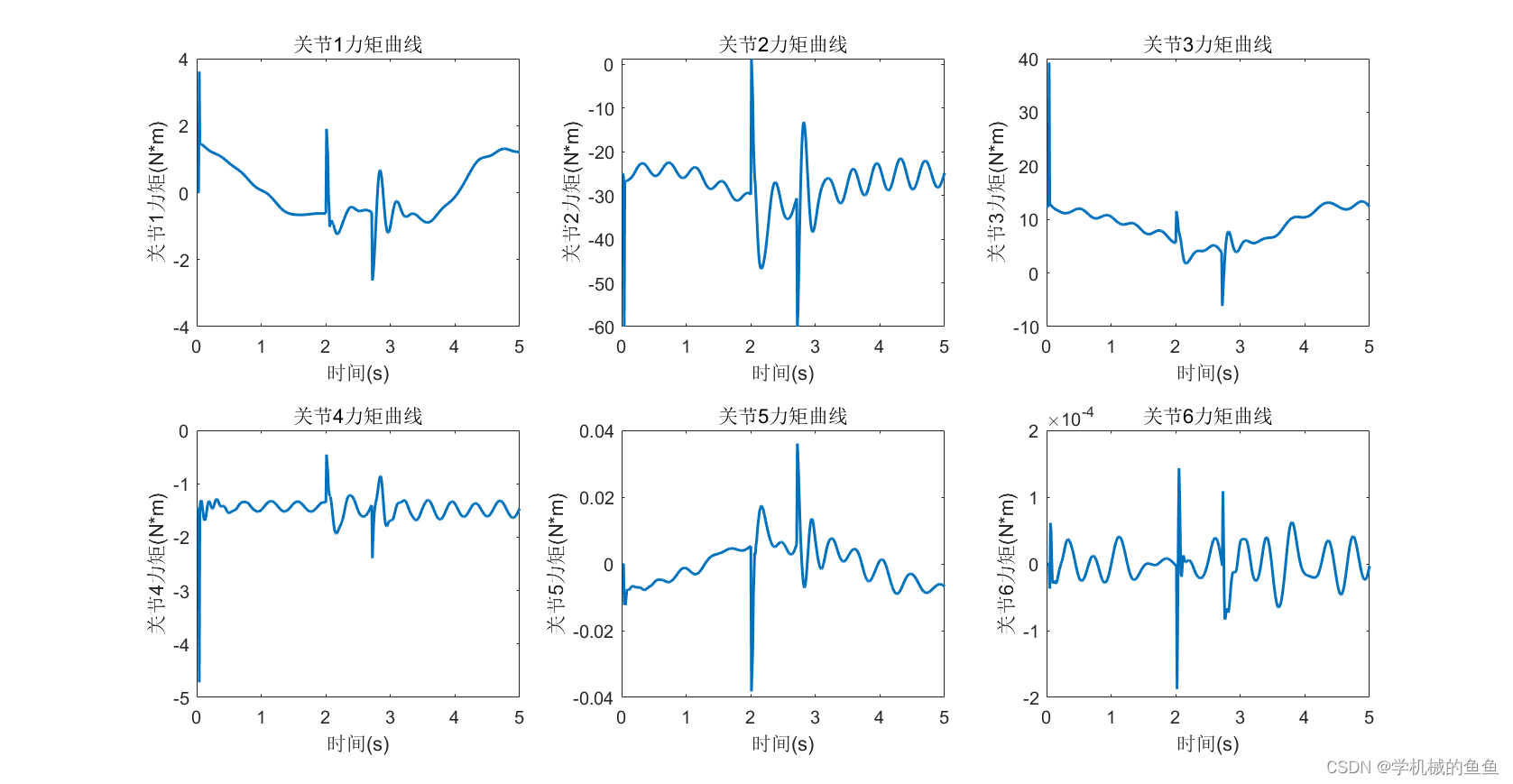
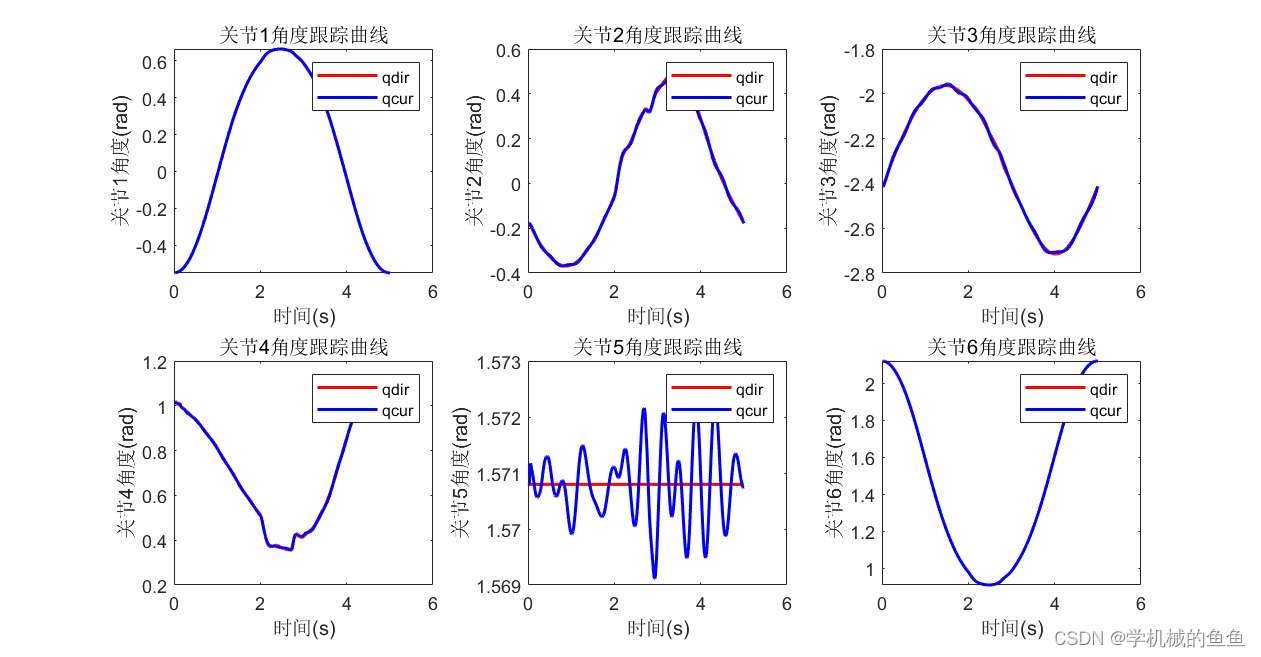
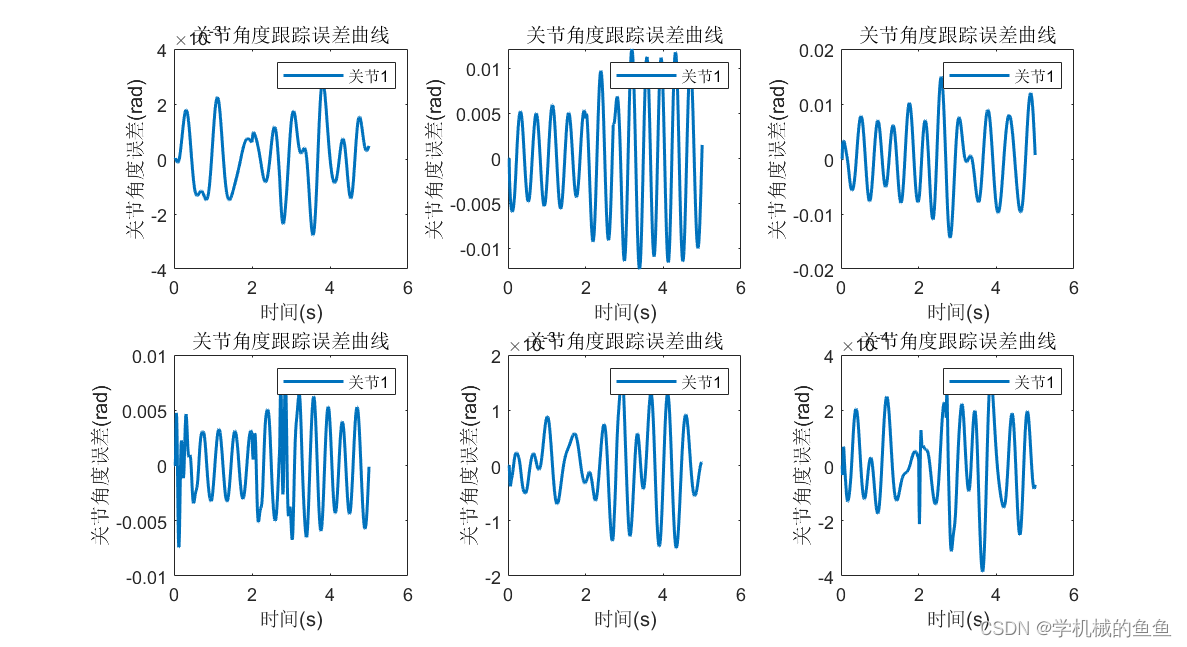
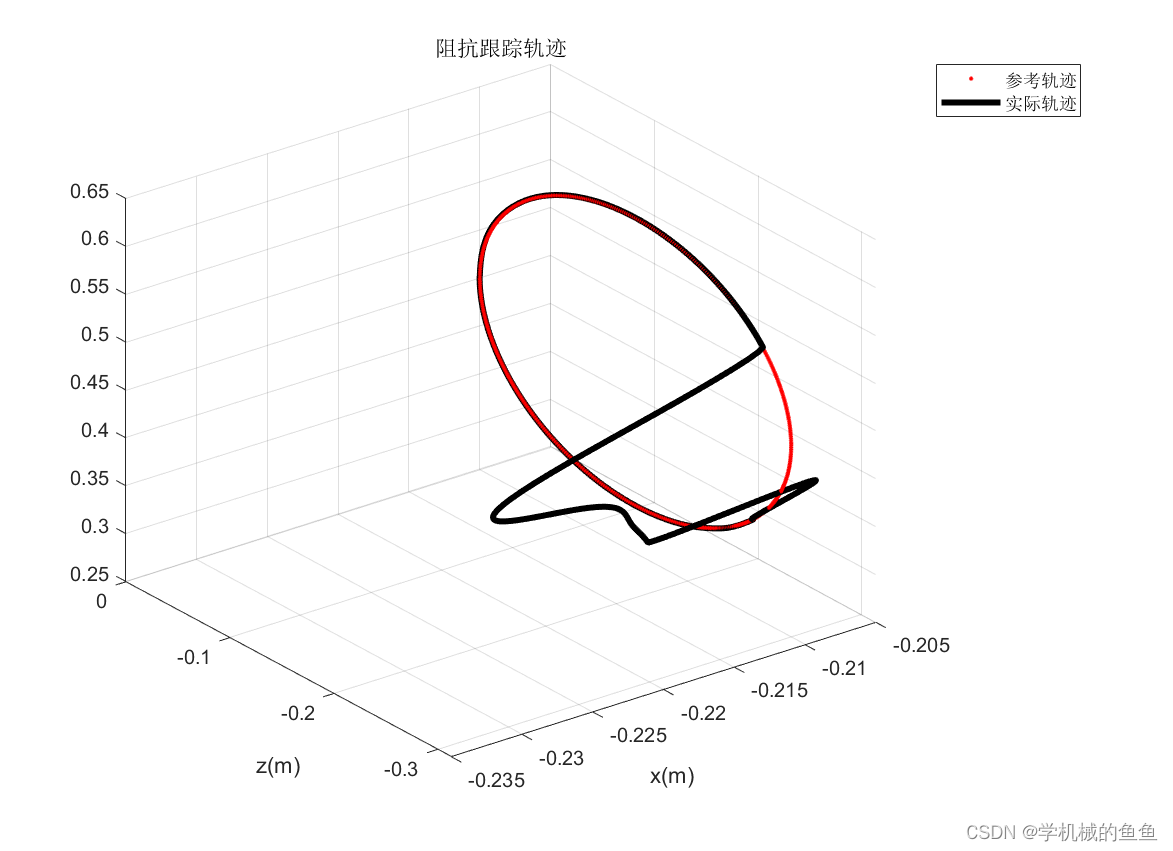
1.整个代码的控制流程图如下: 2.正逆运动学计算 略 3.动力学模型 采用拉格朗日法计算机械臂的动力学模型,其输入的是机械臂的关节角度、角速度和角加速度;其中M、C、G本别是计算的惯性力、科式力和重力项,相关部分如下: 4.RBF神经网络自适应参数调节 采用RBF自适应调节阻抗控制器参数,末端每个方向单独进行参数的调整,其中rbf的输入的是力和位置,输出的是阻抗控制器的参数,rbf原理如下: RBF的具体实现如下: 5.阻抗控制器的实现 主要是雅可比还有动力学模型的计算,以及干扰力矩的估计,具体的控制模型如下: 其中干扰力的估计如下: 6.运行结果

























 1685
1685

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








