






 本文介绍了在使用Autoware和Nebula激光雷达驱动Pandar40P时,由于rviz中点云话题的QoS配置与驱动包不匹配导致的警告。通过`ros2topicinfo`命令发现并解决了这个问题,强调了在ROS2中正确配置QoS以确保服务兼容性的重要性。
本文介绍了在使用Autoware和Nebula激光雷达驱动Pandar40P时,由于rviz中点云话题的QoS配置与驱动包不匹配导致的警告。通过`ros2topicinfo`命令发现并解决了这个问题,强调了在ROS2中正确配置QoS以确保服务兼容性的重要性。
关于Qos的含义和用途请参考链接
ROS2 Quality of Service 服务质量 QoS 简介
问题现象:在运行autoware.universe的,使用nebula驱动来开启禾赛激光雷达Pandar40P。
运行launch文件,并在另外一个终端运行rivz2
ros2 launch nebula_ros nebula_launch.py显示[component_container-1] [WARN] [1708687804.230749600] [hesai_driver_ros_wrapper_node]: New subscription discovered on topic '/pandar_points', requesting incompatible QoS. No messages will be sent to it. Last incompatible policy: RELIABILITY_QOS_POLICY
nebula驱动报错信息
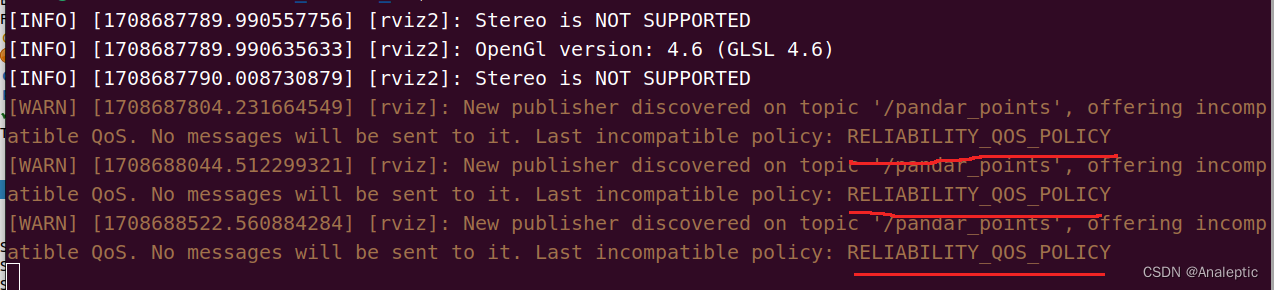
RIVZ2报错信息
分析原因是:rviz里面的点云的话题的Qos配置和驱动包不同
检查方法:ros2 topic info /pandar_points --verbose
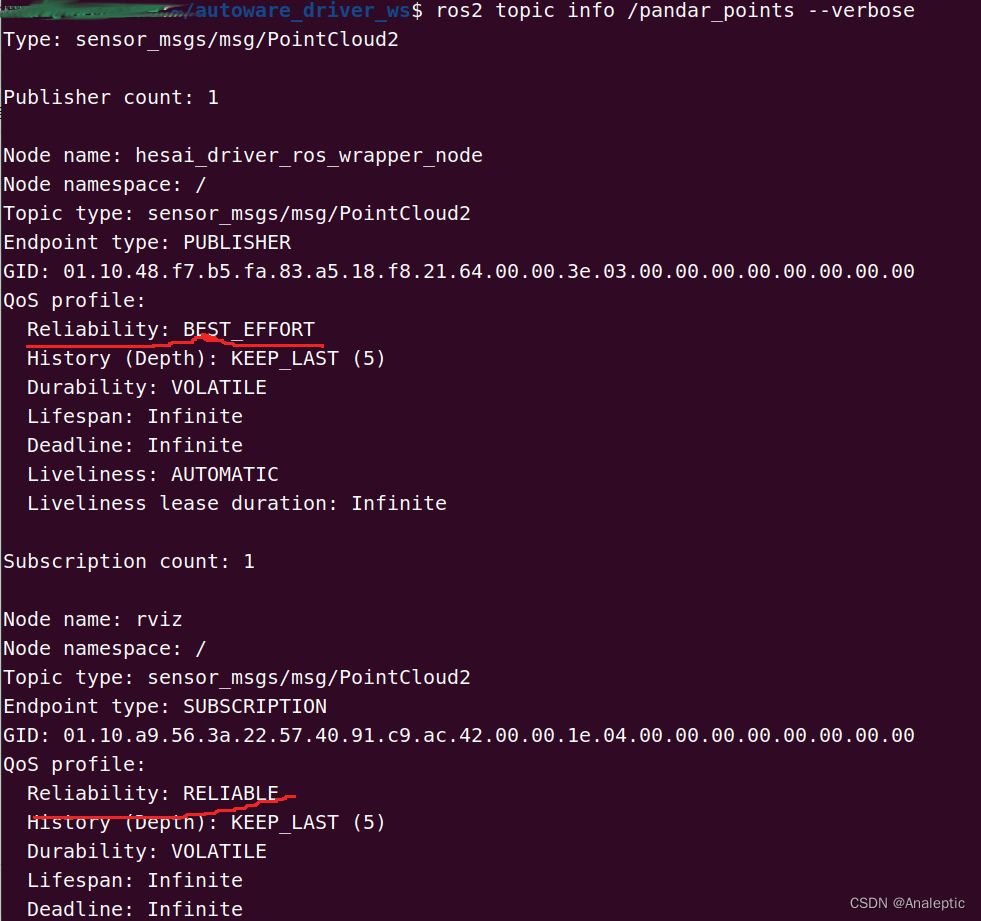
发现这两个不同,故在rviz里修改。
修改前: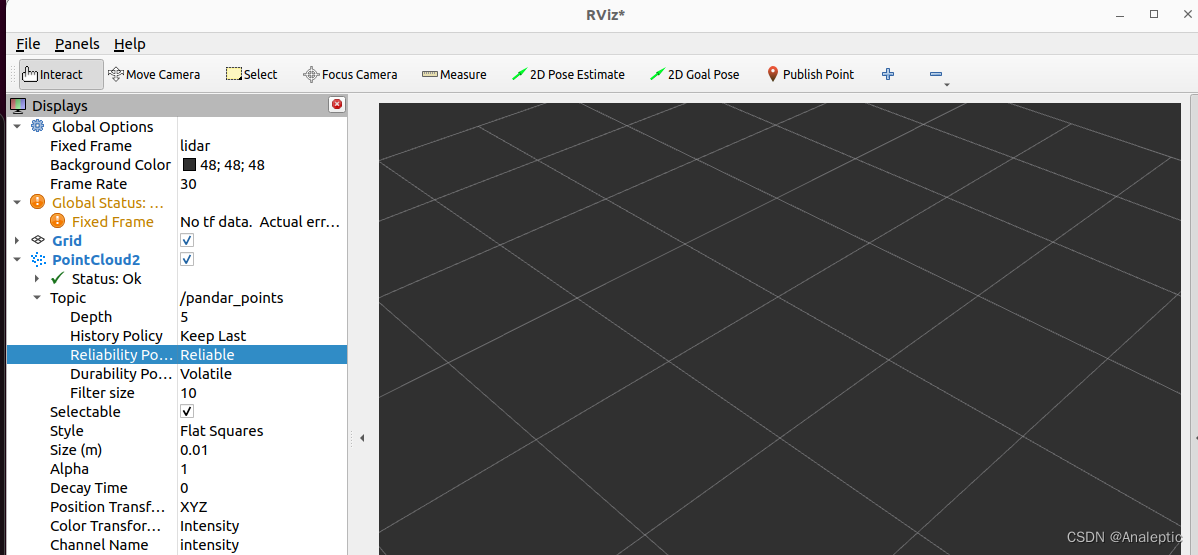
修改后: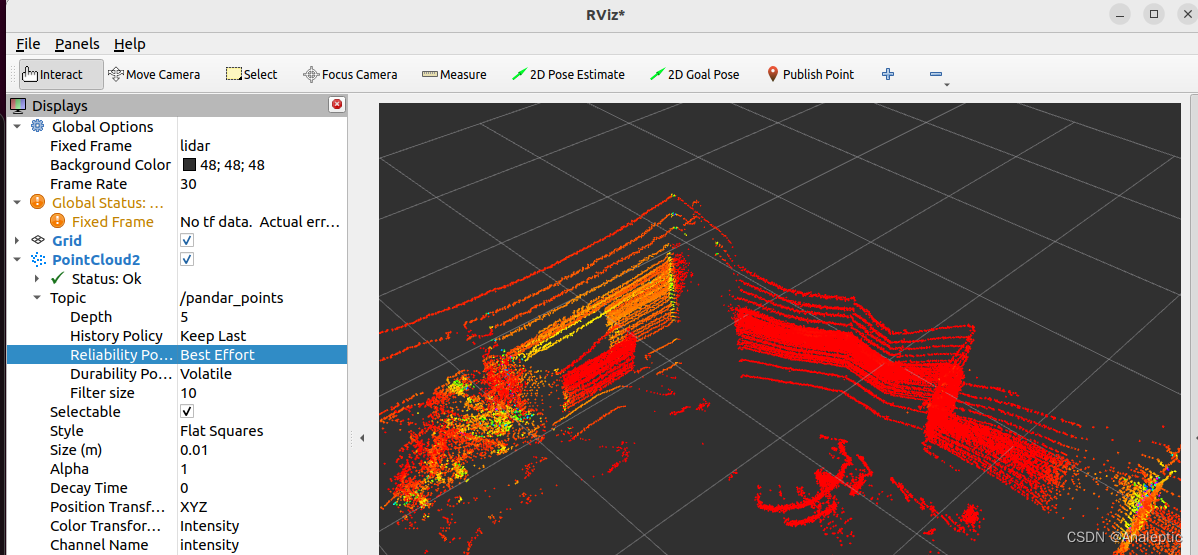















 3799
3799











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









