







非常高兴接到官方邀请,能够为orange pi kunpeng pro做一次简单的开箱测评, 这是一款极具性价比的开发板,下面是一些参数信息
| 功能 | 详细信息 |
|---|---|
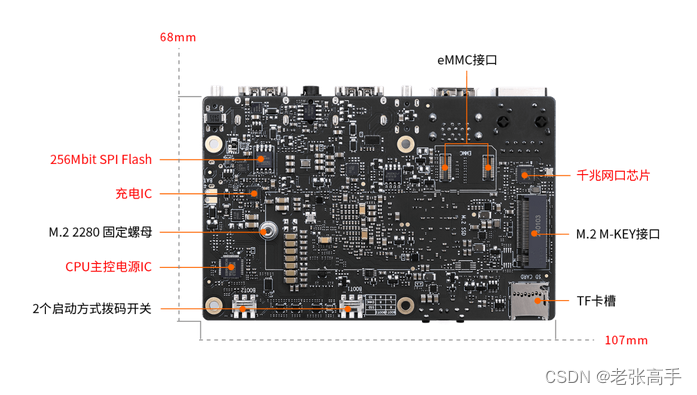
| 尺寸 | 107x68 毫米 |
| 内存 | 8/16GB LPDDR4X |
| 闪存 | 32MB SPI Flash |
| SSD 支持 | M.2 2280 NVMe/SATA |
| 外接存储 | 32/64/128/256GB eMMC |
| MicroSD 卡槽 | 是 |
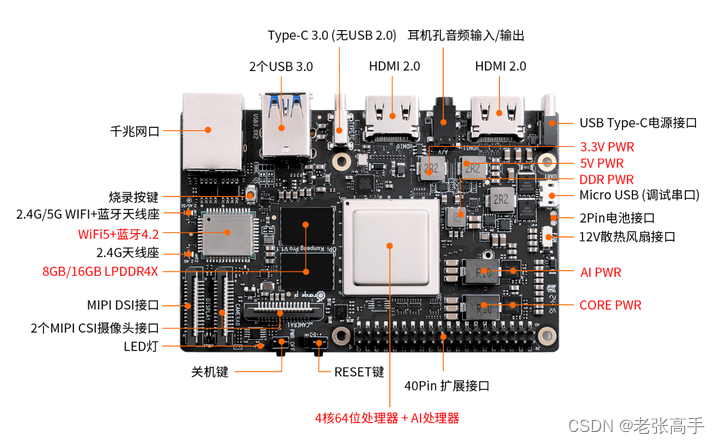
| 接口 | 2个HDMI (4K60), 40针GPIO (UART/I2C/SPI/I2S/PWM), 2个USB 3.0, USB-C 3.0, microUSB (调试), 2个MIPI摄像头接口, MIPI屏幕接口, 3.5毫米耳机接口, Type-C 20V/65W电源接口, 电池接口 |
| 网络 | 千兆以太网, 双频 Wi-Fi 5, 蓝牙4.2 |
开箱俯视图:
对应接口功能图:
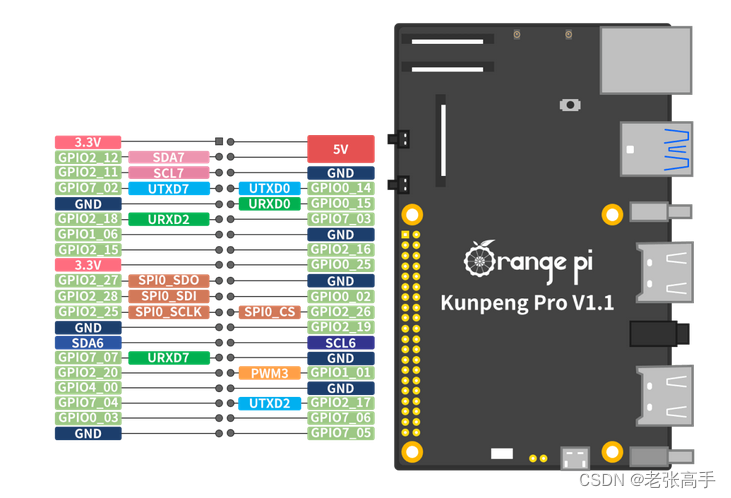
引脚图:
参考资料
官方资料参考
香橙派官方资料Orange Pi Kunpeng pro Orange Pi官网-香橙派(Orange Pi)开发板
因为截止24.5.28官方只提供了两个系统的镜像,一个是ubuntu22.04,还有一个是openEuler, 原卡自带openEuler, 那么这里我选择重新烧录ubuntu22.04的系统
1.ROS Humble安装
Part 1. 调整Ubuntu系统中的相关配置
step 1. 设置语言
终端输入指令:
sudo apt update
sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
step 2. 设置镜像源
用小鱼ros一键布置镜像源, 小鱼的一键布置ROS不太好用,这里选择手动布置ROS2
wget http://fishros.com/install -O fishros && . fishros
step 3. 从github下载相关文件
终端指令:
sudo apt update && sudo apt install curl gnupg lsb-release
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpgecho "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(source /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
step 4. 将上述配置更新至系统
sudo apt-get update
sudo apt-get upgrade
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 2459
2459

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











