







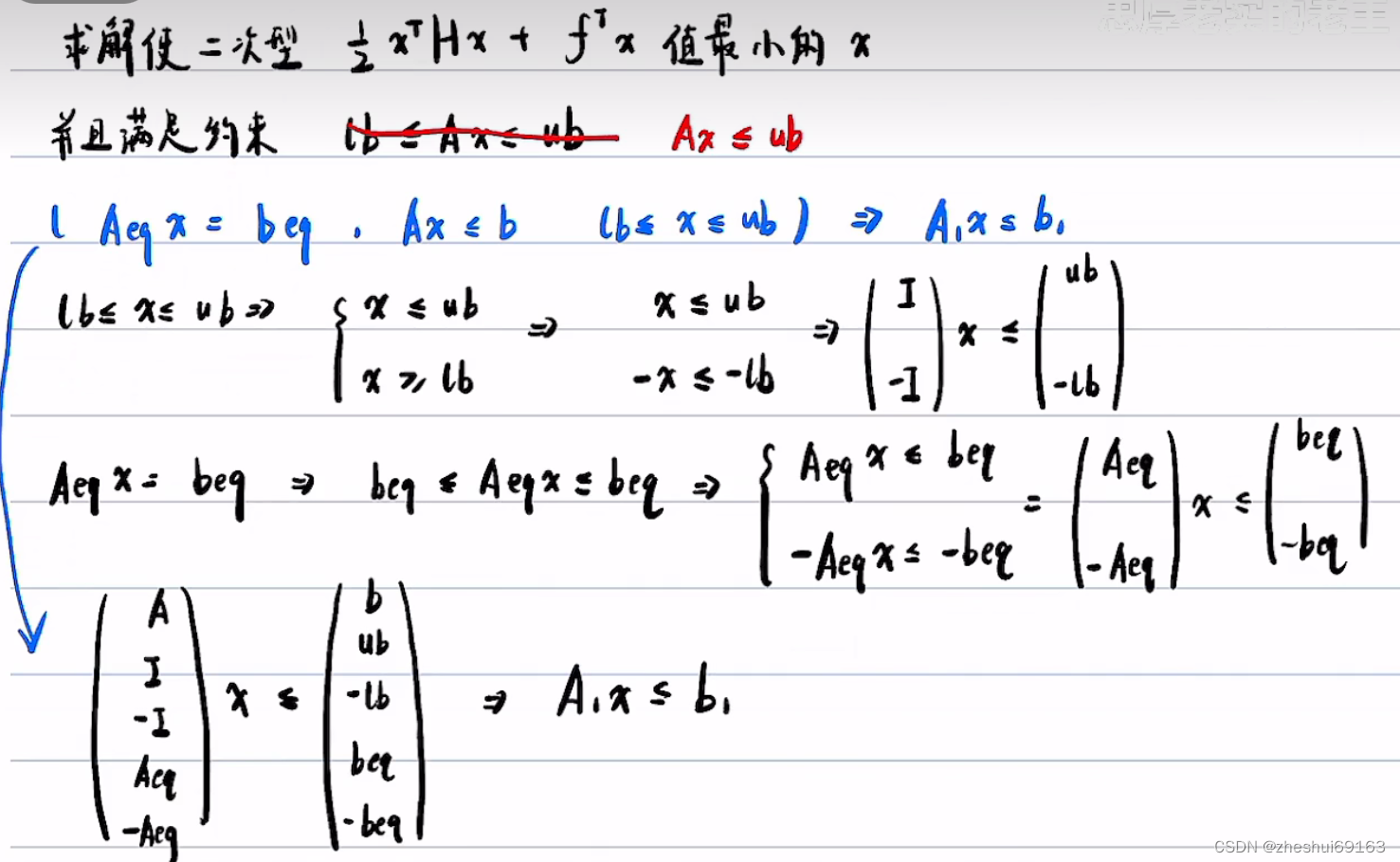
上一节的动态规划只是一个粗解,是将空间离散化后取点得路径,是离散化之后的最优解,但实际上空间是连续的,不能强行离散化,这样得到的解是次最优解
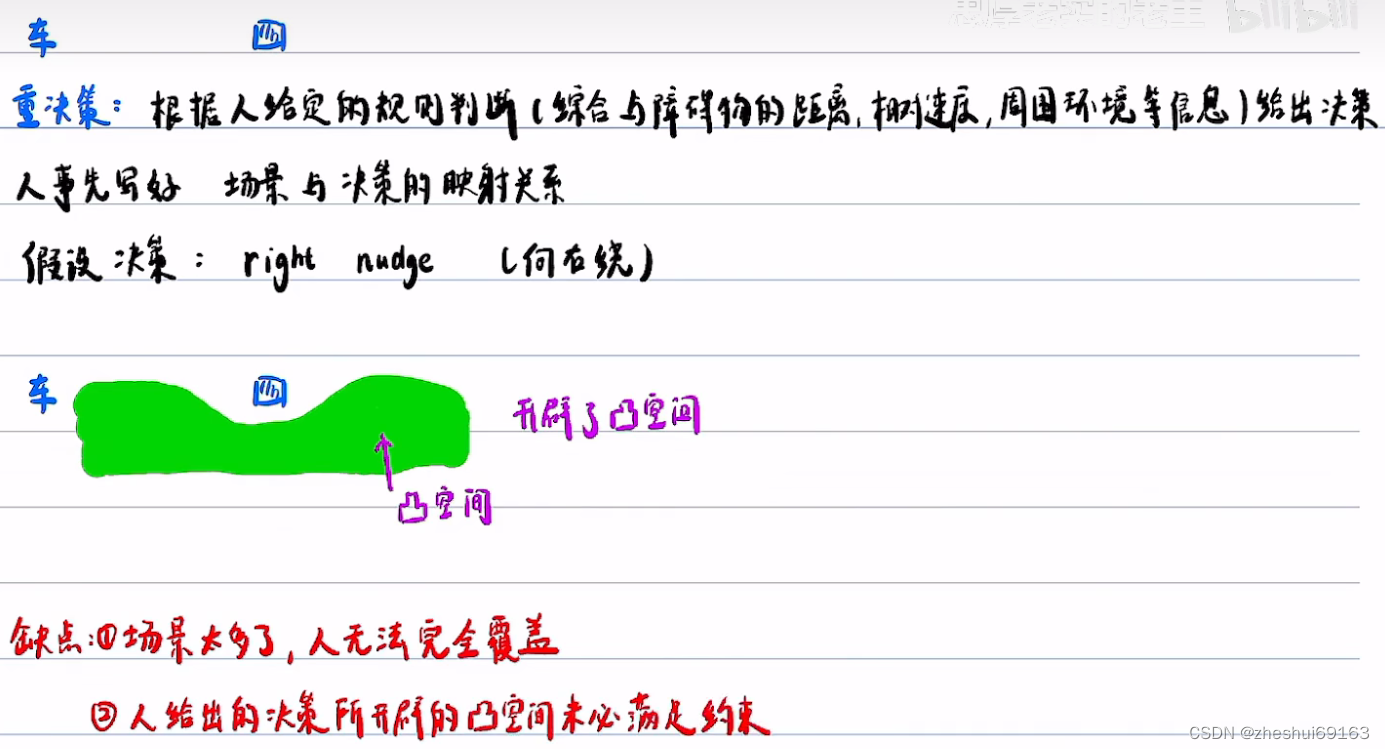
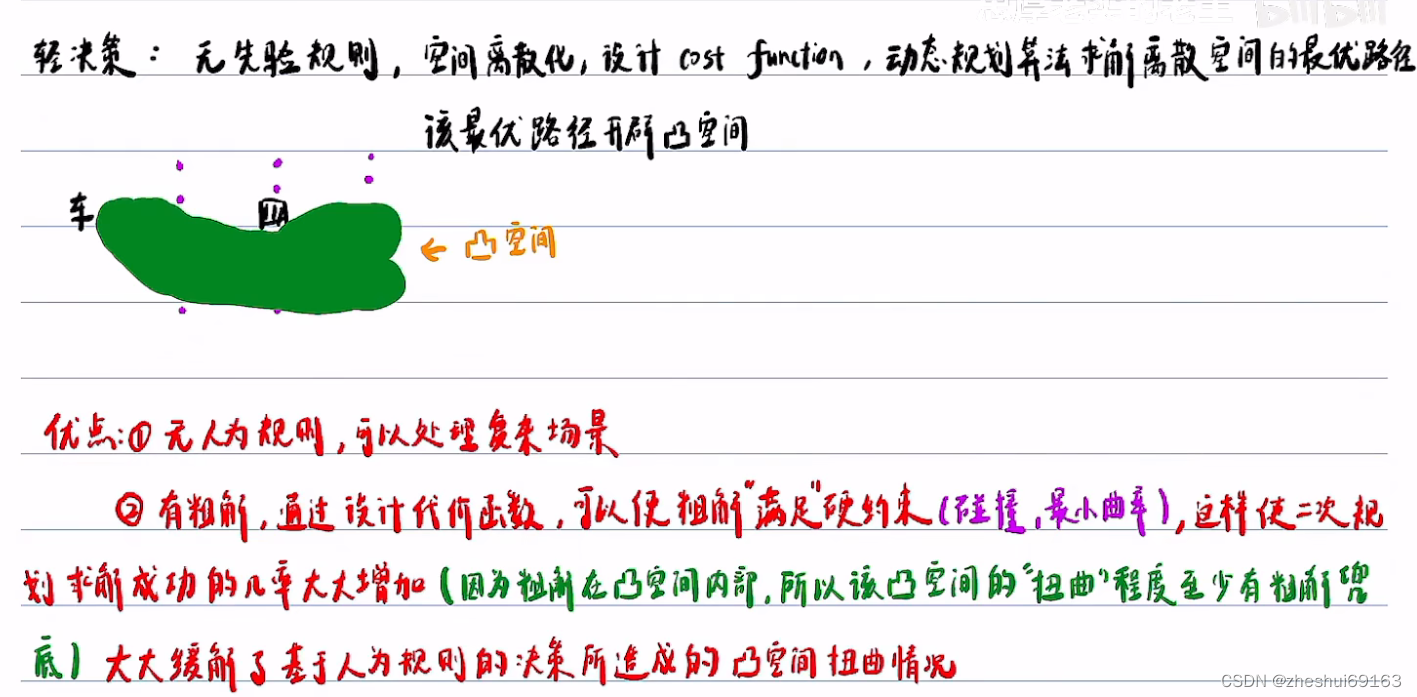
二次规划:在连续空间中找最优解(但要求搜索空间/解空间是凸空间,而动态规划开辟了凸空间,其实啊,动态规划虽然叫规划但是其实相当于局部决策,可以解决遇到障碍物的时候往左/右绕

动态规划与决策的关系
导航-决策(eg动态规划的思想做决策)-规划
之前学的动态规划是决策的一种(至于为什么他叫动态规划,这个规划的意思不是车规划路径的意思,动态规划是算法的一种思想,动态规划的思想就是基于前面的局部最优解,再往后局部算最优解,最后得到全局最优解,化大问题为小问题,在决策左/右走的时候,我们是撒点,然后想找最短的路径,每次都算最短的并赋值给该点,并继续算)
注意哈:下面的绿色区域是凸空间,这个不是数学上的意思,而是 可行路径+可行路径=可行路径(参考之前 非凸空间那个图)
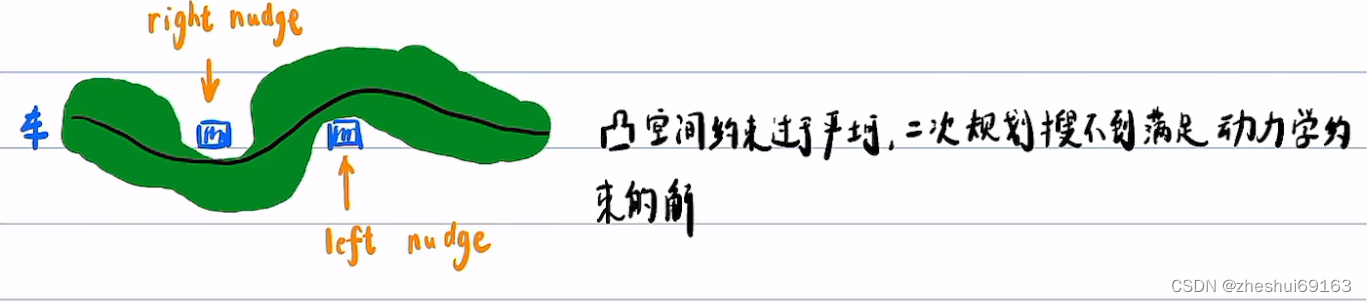
eg下面这样人给出的决策,emm虽然是凸空间,但是弯弯绕绕,在其中搜索一个平滑、满足车辆动力学约束的解是非常困难的
以后可能会融合(热点问题:博弈)
在Apollo 7.0做了很大的改动:在预测模块中加了人与车、车与车的博弈
还有一个热门方向:深度学习做决策,让规则兜底














 2579
2579











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









