









引言
自动驾驶感知中,需要对物体(主要是车辆)进行实时跟踪与预测,是车辆进行决策的前提条件之一。MATLAB自动驾驶工具箱rackingKF类及相关函数提供了线性卡尔曼滤波器可以在位置、速度和加速度上对物体的运动进行跟踪。本文将基于线性卡尔曼滤波的理论知识对MATLAB帮助文档中的rackingKF类实例进行解读。
trackingKF 简介
trackingKF 可以对车辆、行人、自行车和静止物体或障碍物的跟踪,它假设卡尔曼滤波器的过程噪声和测量噪声(process and measurements)都是加性噪声(additive noise),当以上噪声都是高斯噪声时,卡尔曼滤波器的优化目标就是线性过程的最小二乘估计。
trackingKF有两种使用方法:
- 直接设置运动类型。
- 直接使用预定义好的运动模型。
| 运动模型 |
|---|
| ‘1D Constant Velocity’ |
| ‘1D Constant Acceleration’ |
| ‘2D Constant Velocity’ |
| ‘2D Constant Acceleration’ |
| ‘3D Constant Velocity’ |
| ‘3D Constant Acceleration’ |
预定义好的模型包括了恒速模型、恒加速度以及x、y、z三个方向共6种模型。
trackingKF 实例
直接看实例。
- 初始化卡尔曼滤波器
x = 5.3;
y = 3.6;
initialState = [x;0;y;0];
KF = trackingKF('MotionModel','2D Constant Velocity','State',initialState);
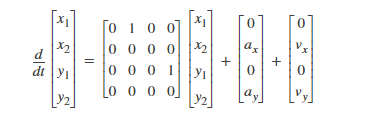
初始化一个2D的恒速度模型,状态变量:x, vx, y, vy。即只考虑x、y方向的位移和速度,不考虑z方向以及加速度。
- 初始化真实速度、位移
vx = 0.2;
vy = 0.1;
T = 0.5;
pos = [0:vx*T:2;5:vy*T:6]';
- 预测和更新
for k = 1:size(pos,1)
pstates(k,:) = predict(KF,T);
cstates(k,:) = correct(KF,pos(k,:));
end
主要用到了predict和correct两个函数实现了卡尔曼滤波中的两大主要步骤:预测和更新。
KF结果如下:
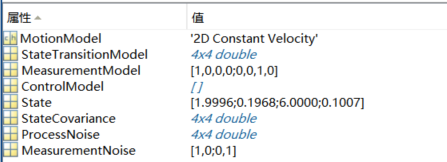
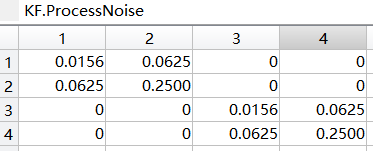
StateConvariance、ProcessNoise、MeasurementNoise分别对应KF滤波中的P、R、Q协方差矩阵。

其中,R、Q协方差矩阵为初始化后的固定值。这里都采用的是默认值。
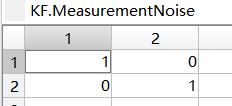
其中R矩阵可以参考如下公式:

其中加速度方差是D(a)默认为1。(尝试过人为修改,但是无效,说明设定好模型参数后R矩阵使用的是默认参数,无法修改);Q矩阵则可以修改;P矩阵在随着迭代改变。
控制矩阵为空,即没有输入:
- 绘制
plot(pos(:,1),pos(:,2),'k.', pstates(:,1),pstates(:,3),'+', ...
cstates(:,1),cstates(:,3),'o')
xlabel('x [m]')
ylabel('y [m]')
grid
xt = [x-2 pos(1,1)+0.1 pos(end,1)+0.1];
yt = [y pos(1,2) pos(end,2)];
text(xt,yt,{'First measurement','First position','Last position'})
legend('Object position', 'Predicted position', 'Corrected position')

从图中可以看出,即使刚开始初始化值较差,最终经过KF滤波后仍然会逼近真实值。















 371
371











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









