







 该教程详细介绍了如何在Win10系统中,使用英伟达显卡、Anaconda和Python3.7创建环境,安装EpicGameLauncher和Unreal Engine,特别是针对4.x版本的LandscapeMountains地图。接着,指导安装Visual Studio 2022并配置必要的组件,编译AirSim插件,并将其集成到LandscapeMountains项目中。最后,通过pip安装相关库,使用Python客户端控制AirSim中的汽车。
该教程详细介绍了如何在Win10系统中,使用英伟达显卡、Anaconda和Python3.7创建环境,安装EpicGameLauncher和Unreal Engine,特别是针对4.x版本的LandscapeMountains地图。接着,指导安装Visual Studio 2022并配置必要的组件,编译AirSim插件,并将其集成到LandscapeMountains项目中。最后,通过pip安装相关库,使用Python客户端控制AirSim中的汽车。
1. win10 + 英伟达显卡
2. anaconda + python3.7 安装好后创建名字叫paddle的独立运行环境,并且能够运行下面命令: paddle.utils.run_check() 提示成功。
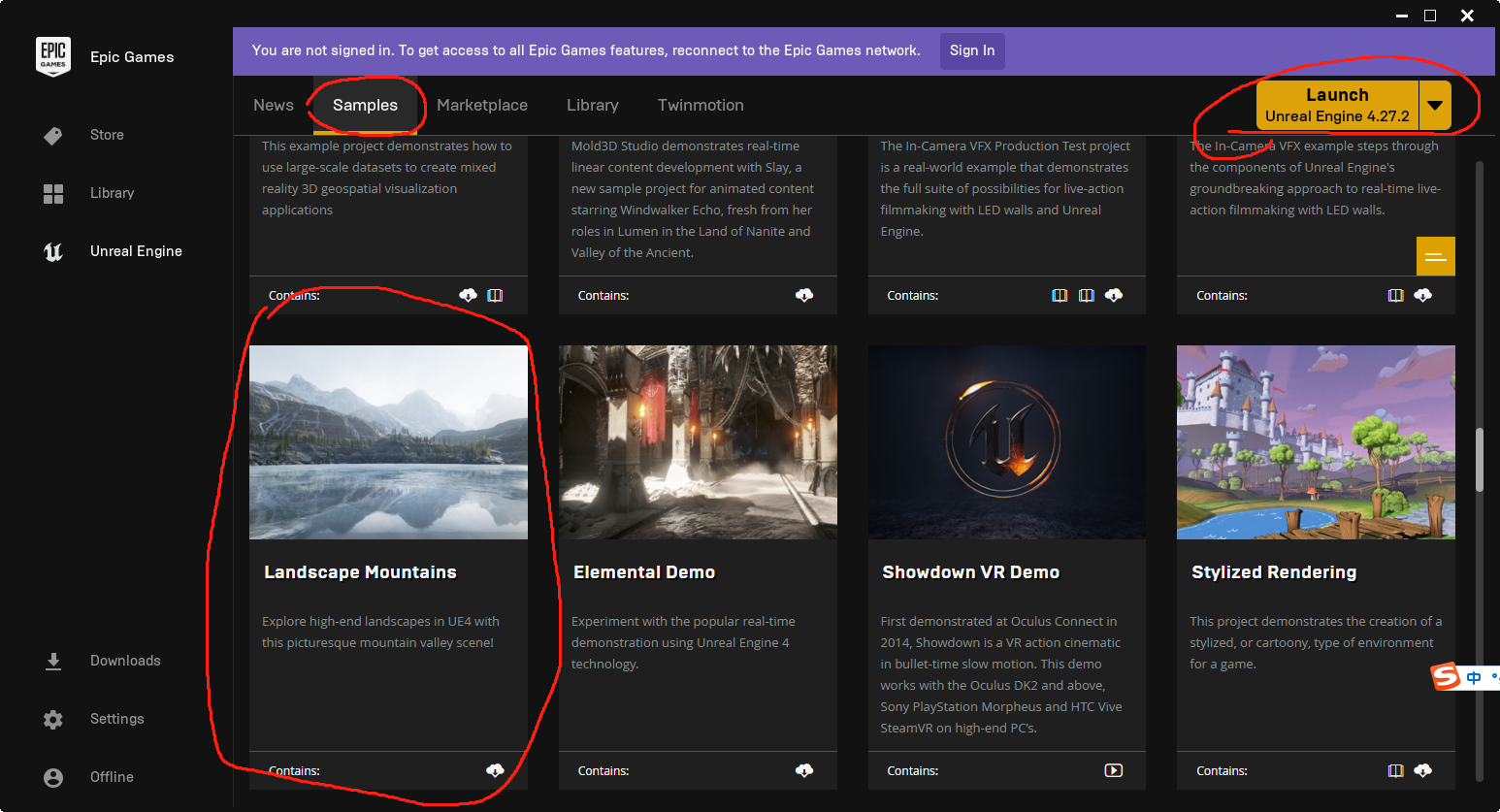
3. 安装Epic Game Launcher
4. 在Launcher中安装Unreal游戏引擎
5. 在Launcher中安装地图Landscape Mountains,注意要装4.x版本,最新的5.x版本还不支持
6.安装visual studio 2022,只需要下面两个组件 1.使用C++的桌面开发 2.安装组件:Window 10 SDK(10.0.18362.0)
7:编译AirSim插件
1. 下载AirSim源代码: git clone https://github.com/Microsoft/AirSim.git
2. 打开windows菜单的Developer Command Prompt for VS 2022,在项目根目录下输入命令:build.cmd
3. 检查插件目录:$ProjectRoot\Unreal\Plugins\ 看插件是否生成。
8.确认Visual Studio 2022环境安装好
1. 打开Developer Command Prompt for VS 2022,在$ProjectRoot\Unreal\Environments\Blocks目录下输入命令:update_from_git.bat
2. 弹出窗口点击确定,关联当前引擎
3. 进入目录双击Blocks.sln, VS2022自动启动。
4. 编译选项设置为:DebugGame_Editor + Win64
5. 点击菜单“调试”–>“开始调试”,虚幻编辑器启动
6. 点击“运行”,点击确定
9: 配置Visual Studio 2022 + LandscapeMountains
1. 进入本机文件夹,打开文件LandscapeMountains.uproject,选择用当前Unreal版本打开
2. Unreal 中File –> New C++ Class –> Next –> Create Class 因为Unreal必须要求有一个新类才会触发编译并打开VS 2022 项目LandscapeMountains.sln

3. 拷贝task1编译好的Unreal\Plugins进入下载的LandscapeMountains本地文件夹
4. 关闭所有相关项目窗口,重新打开文件LandscapeMountains.uproject,提示AirSim需要重新构建,点击确定
5. 用文本编辑器编辑文件LandscapeMountains.uproject,如下修改:
{
"FileVersion": 3,
"EngineAssociation": "4.27",
"Category": "Samples",
"Description": "",
"Modules": [
{
"Name": "LandscapeMountains",
"Type": "Runtime",
"LoadingPhase": "Default",
"AdditionalDependencies": ["AirSim"]
}
],
"TargetPlatforms": [
"MacNoEditor",
"WindowsNoEditor"
],
"Plugins": [
{
"Name": "AirSim",
"Enabled": true
}
],
"EpicSampleNameHash": "1226740271"
}
6. 用文本编辑器编辑Config\DefaultGame.ini,如下修改
[/Script/EngineSettings.GeneralProjectSettings]
Description=
Description=A showcase of the Landscape and foliage tools, featuring a heightmap and layers imported from World Machine..
ProjectID=881E71244681AB72C66F4396AC95B848
ProjectName=Landscape Mountains Showcase
MapsToCook=(FilePath="/AirSim/AirSimAssets")
7. 保存并关闭所有相关窗口后,右键文件LandscapeMountains.uproject,点击Generate Visual Studio Project Files
8. 双击LandscapeMountains.sln,打开VS 2022,编译选项置为”DebugGame Editor”和”Win64″,点击开始调试(F5)。程序会自动打开Unreal编辑器
9. 在右上找到“Player Start”对象并单击,右下角会显示详细,删除其他Player Start[00 - 99],并在主窗口中把它移动到一条路上
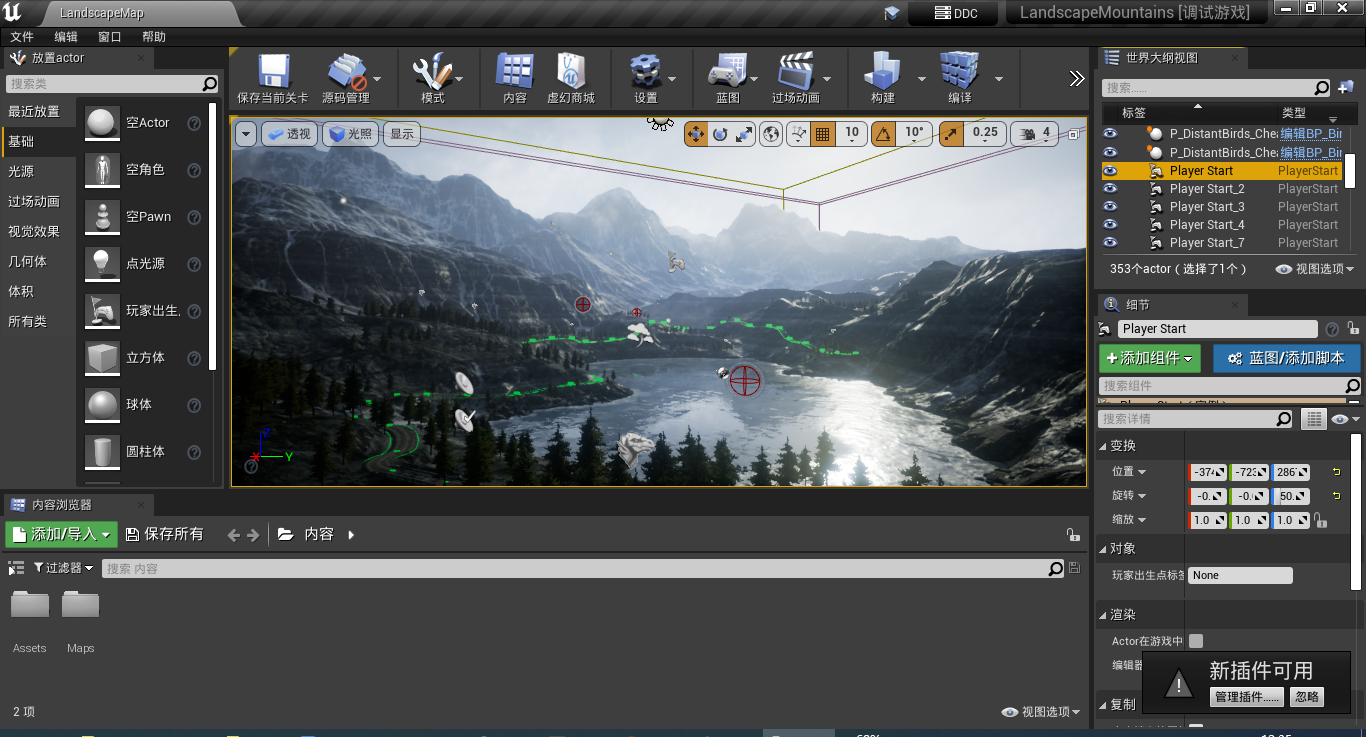
10. 点击菜单“窗口” –> 世界场景设置 在右下角“详细”页签旁边打开World Settings。
11. 在World Settings里面选中的“游戏模式”–> “游戏模式重载”滚动并选中选项:“AirSimGameMode” 可选:如果你的电脑性能不行,可以在“编辑”–>“编辑器偏好设置”,搜索“CPU”,勾选上:处于背景时占用较少CPU。
12. 菜单中点击保存所有。
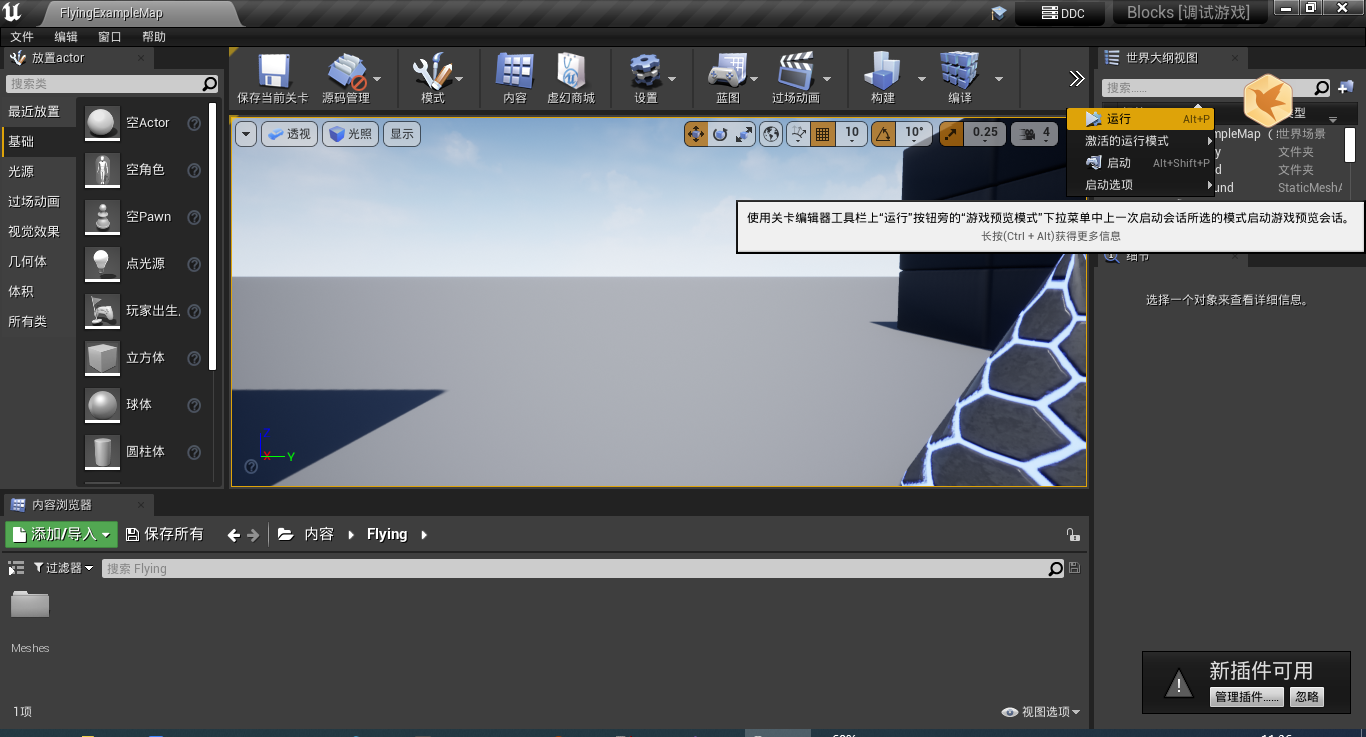
13. 点击Play,示例项目配置完毕。
______________________
1. 使用pip安装下面两个库
# 安装Unreal和python之间的通讯协议
pip install msgpack-rpc-python
# 安装airsim的python库
pip install airsim2. 在Anaconda中启动VS Code,打9开文件夹PythonClient\car\(git下载的),运行hello_car.py,确认可以通过python控制汽车

















 791
791

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









