









前言
此文档简单介绍北醒单点系列雷达(串口版本)通过TTL转USB转接板在Ubuntu系统上使用python读取雷达数据
测试环境搭建
软件环境
- Ubuntu 16.04 桌面版

- Python 3.5.2

- Python 第三方库
pyserial
numpy
第三方库安装说明
如果已安装pip可忽略此命令
sudo apt-get install python3-pip
安装pyserial
pip3 install pyserial
安装numpy
pip3 install numpy
接线说明
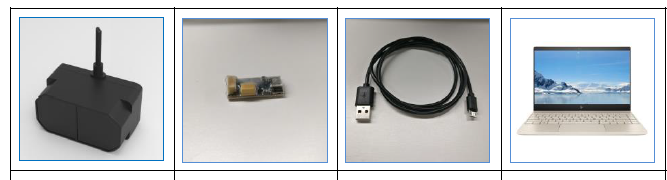
雷达、TTL转USB转接板,USB线、电脑

操作说明
确认接好线后,查询一下设备端口
ls -l /dev/ttyUSB*
如图:

此次使用的接口是 /dev/ttyUSB1
在下方代码下更改对应的接口
ser.port = '/dev/ttyUSB1' #设置端口
运行对应的python文件脚本test.py(此文件需要按照自己的文件命名)
sudo python3 test.py

程序源码
#创建日期:2020年10月10日
#版本:初版
#此程序对应北醒TF系列默认配置下串口版本有效
#此程序只提供参考和学习
# -*- coding: utf-8 -*-
import serial.tools.list_ports
import time
import numpy as np
ser = serial.Serial()
ser.port = '/dev/ttyUSB1' #设置端口
ser.baudrate = 115200 #设置雷达的波特率
def getTFminiData():
while True:
count = ser.in_waiting #获取接收到的数据长度
if count > 8:
recv = ser.read(9)#读取数据并将数据存入recv
#print('get data from serial port:', recv)
ser.reset_input_buffer()#清除输入缓冲区
if recv[0] == 0x59 and recv[1] == 0x59: # python3
distance = np.int16(recv[2] + np.int16(recv[3] << 8))
strength = recv[4] + recv[5] * 256
temp = (np.int16(recv[6] + np.int16(recv[7] << 8)))/8-256 #计算芯片温度
print('distance = %5d strengh = %5d temperature = %5d' % (distance, strength, temp))
ser.reset_input_buffer()
if recv[0] == 'Y' and recv[1] == 'Y': # python2 //此处标示出文件读取成功
lowD = int(recv[2].encode('hex'), 16)
highD = int(recv[3].encode('hex'), 16)
lowS = int(recv[4].encode('hex'), 16)
highS = int(recv[5].encode('hex'), 16)
lowT = int(recv[6].encode('hex'), 16)
highT = int(recv[7].encode('hex'), 16)
distance = np.int16(lowD + np.int16(highD << 8))
strength = lowS + highS * 256
temp = (np.int16(lowD + np.int16(highD << 8)))/8-256 #计算芯片温度
print('distance = %5d strengh = %5d temperature = %5d' % (distance, strength, temp))
else:
time.sleep(0.005) #50ms
if __name__ == '__main__':
try:
if ser.is_open == False:
try:
ser.open()
except:
print('Open COM failed!')
getTFminiData()
except KeyboardInterrupt: # Ctrl+C 停止输出数据
if ser != None:
ser.close()
结果输出
















 4564
4564











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









