





我用的soildworks是2019版的soildworks to urdf 也是2019版本,ubuntu版本20.04
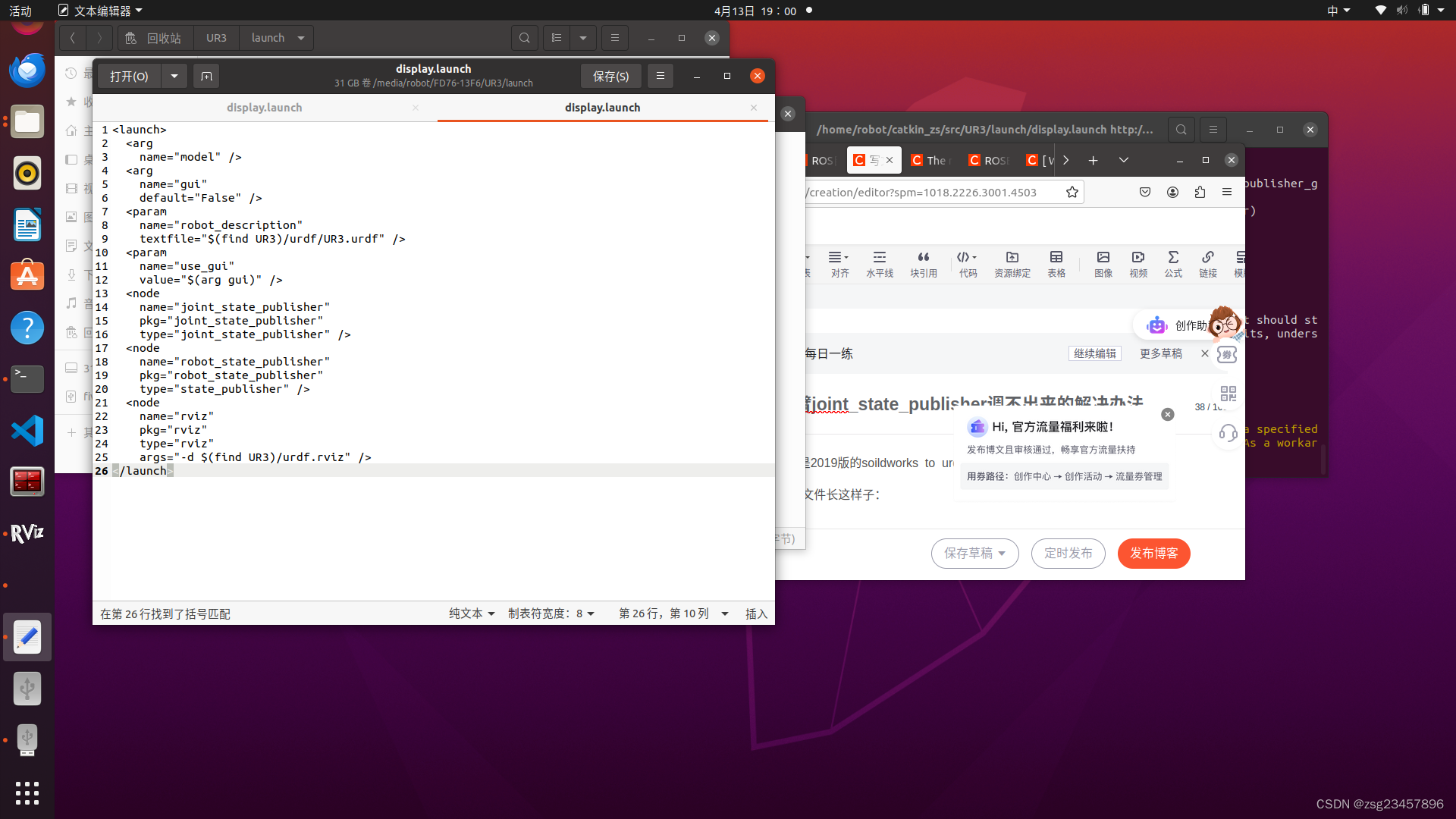
无法调用的launch文件长这样子:
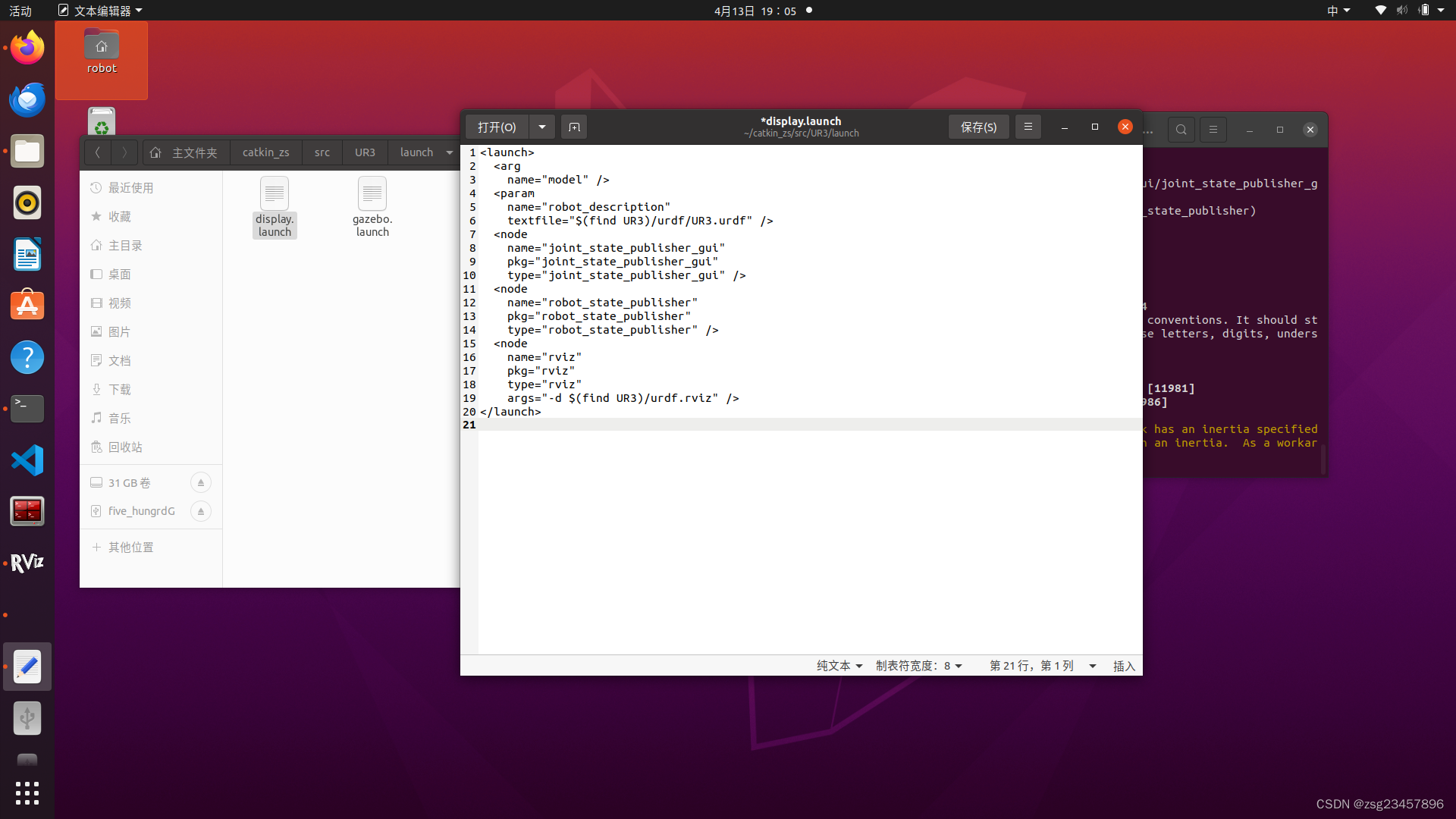
更改后的文件长这样
最后就能调出来了。

我用的soildworks是2019版的soildworks to urdf 也是2019版本,ubuntu版本20.04
无法调用的launch文件长这样子:
更改后的文件长这样
最后就能调出来了。

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



















 811
811





