




 本文探讨了欧拉角、四元数和矩阵旋转的差异,重点关注Unity中的四元数。四元数避免了万向节死锁问题,占用存储少,计算效率高,但表示不直观。文章介绍了四元数的数学基础,包括复数、欧拉旋转定理,并详细阐述了四元数的定义、运算规则及其在三维空间旋转中的应用。
本文探讨了欧拉角、四元数和矩阵旋转的差异,重点关注Unity中的四元数。四元数避免了万向节死锁问题,占用存储少,计算效率高,但表示不直观。文章介绍了四元数的数学基础,包括复数、欧拉旋转定理,并详细阐述了四元数的定义、运算规则及其在三维空间旋转中的应用。
欧拉旋转、四元数、矩阵旋转之间的差异
除了欧拉旋转以外,还有两种表示旋转的方式:矩阵旋转和四元数旋转。接下来我们比较它们的优缺点。
欧拉角
- 优点:三个角度组成,直观,容易理解。
- 优点:可以进行从一个方向到另一个方向旋转大于180度的角度。
- 弱点:死锁问题。 前面《【Unity编程】欧拉角与万向节死锁(图文版)》已经介绍过万向节死锁问题。
四元数
内部由四个数字(在Unity中称为x,y,z和w)组成,然而这些数字不表示角度或轴,并且通常不需要直接访问它们。除非你特别有兴趣深入了解四元数学,你只需要知道四元数表示三维空间中的旋转,你通常不需要知道或修改x,y和z属性。
- 优点:四元旋转不存在万向节锁问题。
- 优点:存储空间小,计算效率高。
- 弱点:单个四元数不能表示在任何方向上超过180度的旋转。
- 弱点:四元数的数字表示不直观。
矩阵旋转
- 优点:与四元数一样,不存在万向节锁问题
- 优点:可以表示围绕任意轴的旋转,四元数的旋转轴均为通过物体中心点的轴,矩阵则不受限
- 缺点:矩阵旋转使用4x4矩阵,记录16个数值,而四元数只需要4个数值。计算复杂,效率低。
由于Unity中的旋转使用四元数,因此本文重点就放在四元数数学上。矩阵还是某些场合需要用到,比如坐标变换。不过你几乎不需要手动去执行矩阵计算,除非你在做Shader编程,或者是某些需要极端提高效率的场合。后续我计划写一篇文章专门介绍矩阵变换。
四元数的数学
由于前面两篇文章均尽可能采用无数字计算的方式,为的是方便理解。而这里由于需要理解四元数的计算,我们还是需要理解一些复数和欧拉旋转计算方面的基本数学。
复数
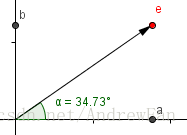
首先了解一下复数,上图中,左右方向的轴(X轴)称为实数轴,上下的轴(Y轴)称为虚数轴。
任意一个二维矢量,都可以使用一个复数形式进行表示。也就是:e = a + bi
其中a是实数,i是虚数,i * i=-1。
至于什么是虚数,我的理解它就是个不同维度的后缀标记和符号而已。i标记了实数轴和虚数轴之间的差异,也就是旋转90度旋转的差别,乘以i意味着这种旋转关系。
为什么i * i=-1?也就是两个虚数i乘积又变成了实数-1?因为从实数轴(1表示)围绕上图中逆时针90度(1*i)到达虚数轴(=i),再逆时针旋转90(1 * i * i)就到达了负实数轴方向(=-1)。所以这里规定i * i=-1。
复数运算
- 加法: (a+bi)+(c+di)=(a+c)+(b+d)i
- 减法: (a+bi)-(c+di)=(a-c)+(b-d)i
- 乘法: (a+bi)(c+di)=ac+bci+adi+bdi^{2}=(ac-bd)+(bc+ad)i
更多复数相关知识,请参考“维基百科-复数_(数学)”
欧拉旋转定理
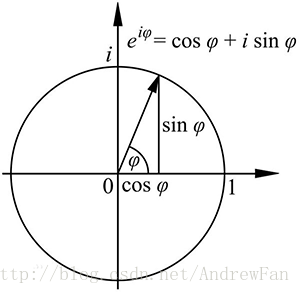
为了方便讨论旋转,我们避开矢量长度的影响,也就是假设问题是基于长度为1的矢量去讨论。由上图可以看出,当长度为1时,矢量落在长度为1的圆形上,此时实数轴上的a = cos(φ),虚数轴上的b = sin(φ),其中φ为旋转角度。
此时的表示形式为 e = cos(φ) + sin(φ)i
那么,使用这样一种形式到底有什么意义呢?数学从来都是工具,如果没有用处,它也就不会存在了。我们接下来看它的作用。
当圆上的一个矢量进行了连续的旋转时时,假设先旋转φ,再旋转θ,则结果应该是两个旋转的角的和的复数形式,即 e = cos(φ+θ)+sin(φ+θ)i
假设:
e1= cos(φ) + sin(φ)i (表示旋转了φ角度)
e2= cos(θ) + sin(θ)i (表示旋转了θ角度)
那么e和e1、e2之间的关系是怎样的?
根据和差公式可以得知
cos(φ+θ)+sin(φ+θ)i
= (cos(φ)cos(θ)-sin(φ)sin(θ))+(sin(θ)cos(φ)+cos(θ)sin(φ))i
= cos(φ)cos(θ)+cos(φ)sin(θ)i+cos(θ)sin(φ)i- sin(φ)sin(θ)
= (cos(φ) + sin(φ)i)*(cos(θ) + sin(θ)i)
= e1 * e2
=>
e = e1*e2
也就是说,连续的旋转(例如这里旋转φ再旋转θ),可以使用两个复数的乘积进行表示。在计算机运算中:
- 如果知道φ=30度,那么计算此单位矢量再旋转θ=40度是很容易的,只需要直接运算cos(φ+θ)和sin(φ+θ)即可。
- 如果知道一个矢量(a+bi),不知其φ值,要对其进行旋转θ=40度,那么也就有了快速的计算方法,即:
(a+bi) * (cos(40)+sin(40)i) = (a * cos(40)-b * sin(40)) + (b * cos(40) + a * sin(40))i
结果:二维向量 x = a * cos(40)-b * sin(40),y= b * cos(40) + a * sin(40)
可以快速计算出二维矢量结果,而不必先求φ。
因此这就是复数和欧拉旋转定理的作用,它可以使用复数很方便地表示出二维矢量的旋转变化。
四元数
相对于复数为二维空间,为了解决三维空间的旋转变化问题,爱尔兰数学家威廉·卢云·哈密顿把复数进行了推广,也就是四元数。
以下均为定义,所谓定义,就是我们人为设置的概念和计算方法,它们本身或许没有什么意义,但是如果按照这些概念和方法计算出某些有意义的结果,那么这些定义也就有了相应的意义。
四元数定义
四元数定义i、j、k三个虚数单位参与运算,并有以下运算规则:
i、j、k仍然理解为旋转,其中:
- i旋转代表X轴与Y轴相交平面中X轴正向向Y轴正向的旋转
- j旋转代表Z轴与X轴相交平面中Z轴正向向X轴正向的旋转
- k旋转代表Y轴与Z轴相交平面中Y轴正向向Z轴正向的旋转
- -i、-j、-k分别代表i、j、k旋转的反向旋转
一个普通四元数可以写成如下形式:
四元数的i、j、k之间乘法的性质与向量之间的叉积结果形式很类似,于是四元数有了另外一种表示形式:
加法定义
四元数加法,跟复数、矢量和矩阵一样,两个四元数之和需要将不同的元素加起来,加法遵循实数和复数的所有交换律和结合律:
格拉斯曼积定义
四元数的乘法有很多种,最常见的一种定义,与数学多项式乘法相同,称为格拉斯曼积。(注意,下面乘积的式子是由多项式形如a+bi+cj+dk的多项式进行多对多乘法(比如4项x4项=16项)计算后,使用矢量的点积和叉积替代部分计算项后形成):
把向量部分和实数部分分开,可以写成:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1002
1002

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









