




原链接: http://community.bwbot.org
运行测试平台:小强ROS机器人
rviz是ros自带的一个图形化工具,可以方便的对ros的程序进行图形化操作。其使用也是比较简单。
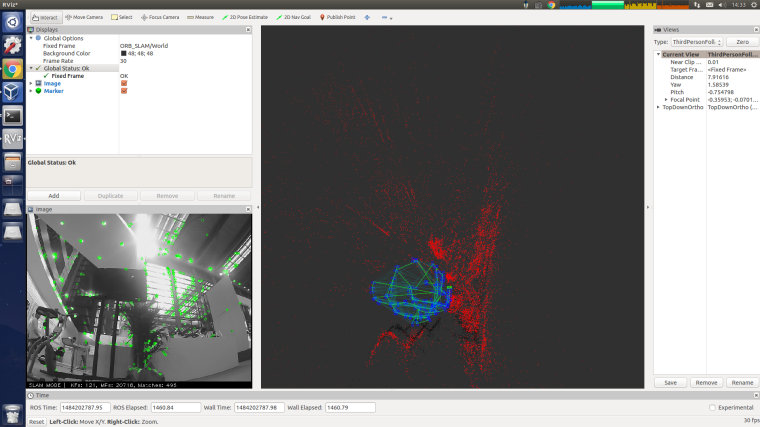
整体界面如下图所示
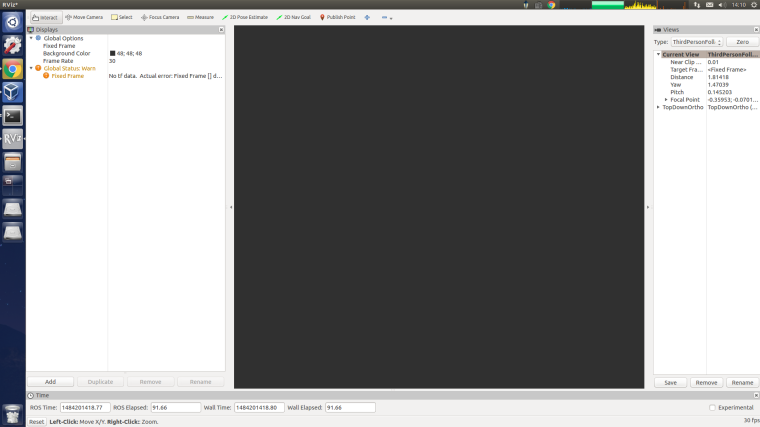
界面主要分为左侧的显示设置区域,中间的大的显示区域和右侧的视角设置区域。最上面是和导航相关的几个工具。最下面是ros状态相关的一些数据的显示。
下面以用rviz查看ORB_SLAM2的topic数据为例展示一下rviz的使用方法
启动ORB_SLAM程序
在终端依次输入
roscore
roslaunch ORB_SLAM2 map.launch
等待程序成功运行启动运行
这时在终端输入
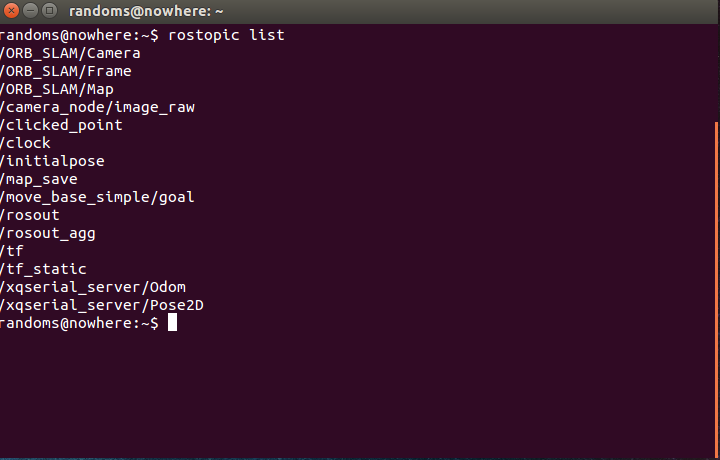
rostopic list
看到如下的输出则说明程序已经成功启动了
添加topic进入rviz
点击rviz左下角的添加按钮,弹出如下图所示的对话框
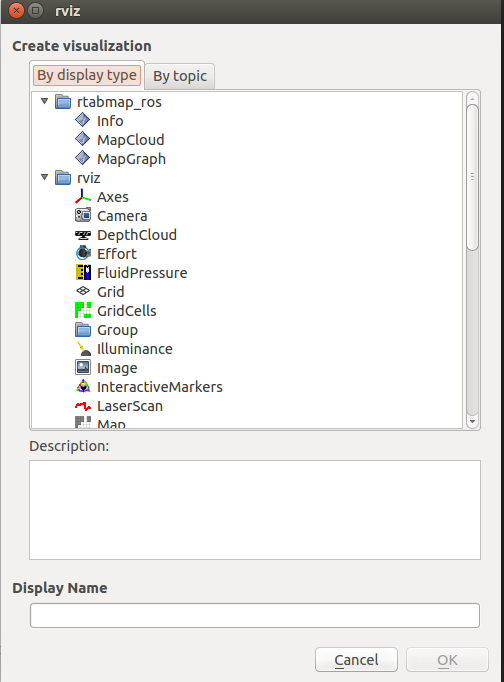
点击by topic,在下面的列表中选择ORB_SLAM相关的几个topic
这样就可以成功添加了
如果添加后出现如下图所示的错误
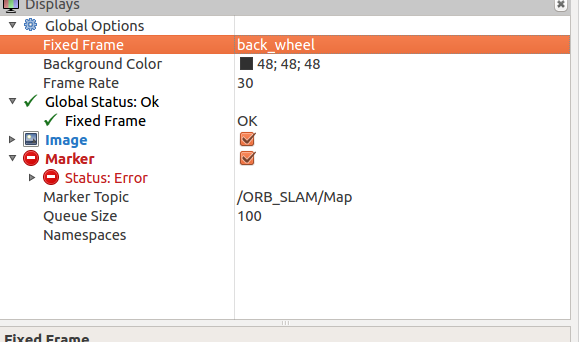
这是由于Glabal Options里面的坐标系设置有问题。将其改成对应的坐标系就可以了。
其他的各种topic都可以通过这种方式方便的进行添加。
基本操作
中间区域显示的ORB_SLAM程序计算出的三维点云。可以通过鼠标左键拖动进行视角的调整。具体的操作方式在最下面的状态栏里面有提示。
右侧区域可以对视角进行更详细的设置
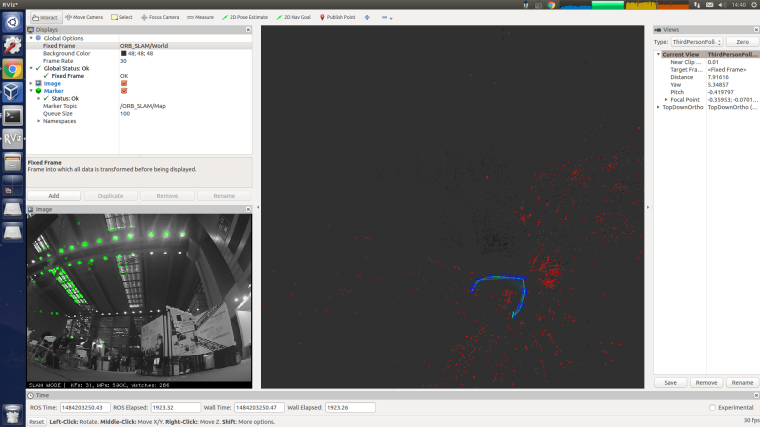
换个角度看一看
保存设置
在配置完成之后,如果不想以后每次都要进行一样的配置,可以把配置文件保存起来。
在最上面的菜单中有保存的选项。
更详细的rviz相关信息可以看官方的wiki

















 472
472

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









