






 本文介绍如何在Ubuntu 16.04上利用Leap Motion手势控制器通过ROS Kinetic实现对Gazebo仿真环境中Turtlebot机器人的控制。首先安装Leap Motion驱动和服务,并通过相关ROS功能包完成编译配置。最后展示启动Leap Motion服务、运行控制节点以及在Gazebo中进行实际操控的步骤。
本文介绍如何在Ubuntu 16.04上利用Leap Motion手势控制器通过ROS Kinetic实现对Gazebo仿真环境中Turtlebot机器人的控制。首先安装Leap Motion驱动和服务,并通过相关ROS功能包完成编译配置。最后展示启动Leap Motion服务、运行控制节点以及在Gazebo中进行实际操控的步骤。
ROS_Kinetic_25 在ubuntu16.04使用Leap_motion并作为手势输入控制Gazebo中的机器人

视频录像:
1. http://v.youku.com/v_show/id_XMTU3NDg2NzMwOA==.html
2. http://v.youku.com/v_show/id_XMTcwNjg2NTk4NA==.html
先附上资料网址:
1. https://developer.leapmotion.com/
2. https://github.com/warp1337/rosleapmotion
3. https://github.com/CityU-MBE/leap_motion_ros
--------
1 安装Leap Motion

注意32bit和64bit版本。在终端输入:
~/LeapDeveloperKit$ sudo dpkg -i Leap-2.3.1+31549-x64.deb会出现如下错误:
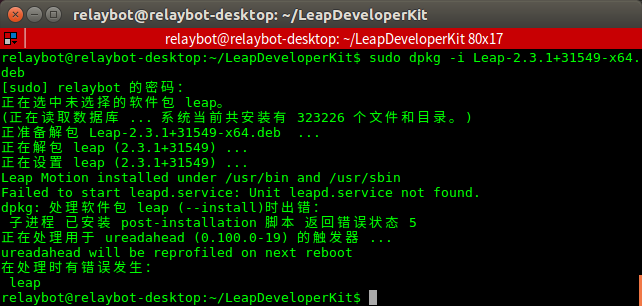
解决方法:
sudo gedit /lib/systemd/system/leapd.service输入并保存:
[Unit]
Description=LeapMotion Daemon
After=syslog.target
[Service]
Type=simple
ExecStart=/usr/sbin/leapd
[Install]
WantedBy=multi-user.target
~/LeapDeveloperKit$ sudo ln -s /lib/systemd/system/leapd.service /etc/systemd/system/leapd.service~/LeapDeveloperKit$ systemctl daemon-reload接着安装就一切顺利了。
~/LeapDeveloperKit$ sudo dpkg -i Leap-2.3.1+31549-x64.deb
我开机不用Leap motion,安装成功后删除了一些配置等,具体说明也可以参考文档和官网。
2 启动测试Leap motion
~/LeapDeveloperKit$ sudo leapd
~/LeapDeveloperKit$ LeapControlPanel
3 在ROS kinetic中使用Leap motion
需要按照相关功能包中的说明文件修改编译环境库或很少的源码,编译成功后,

使用下面命令测试:
rosrun leap_motion sender.py
rosrun leap_motion subscriber.py
4 遥控Gazebo中turtlebot的示例
roslaunch turtlebot_gazebo turtlebot_world.launchroslaunch leap_motion_control leap_control_turtlebot.launch

























 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











