









二 。 实验平台搭建: 机器人kobuki + camera
有了环境后,那得准备实验平台了。 考虑到kobuki有现成的模型,也有gazebo下的仿真。再者,之前改写过turtlebotgazebo的仿真平台,
见ros中利用gazebo进行gmapping仿真:kobuki+kinct -> kobuki+rplidar :用gazebo模拟激光的仿真。现在是模拟摄像头的仿真。。
分析:
直接利用之前的turtlebot的gazebo 2d激光slam的模型改写实验平台。。第一步需要加一个模块当做摄像头;第二步将此摄像头模块具有摄像头功能,即附上插件功能。。
第三部,调试效果,位置姿态信息是否符合进行验证。
1. 启动的launch文件。环境配置 + 机器人平台配置+ camera_to_depth的节点处理(turtlebot利用fake 2d laser的节点)
2. 环境已好,fake可以不关注, 关注机器人平台配置。 :传感器上
slam_world.launch ---》
===》机器人配置信息 :SENSOR的组合
<include file="$(find turtlebot_gazebo)/launch/includes/$(arg base).launch.xml">
kobuki.launch.xml---》》
====》》xacro文件
<arg name="urdf_file" default="$(find xacro)/xacro.py '$(find turtlebot_description)/robots/$(arg base)_$(arg stacks)_$(arg 3d_sensor).urdf.xacro'" />
kobuki_nostack_camera.urdf.xacro (新建一文件)
===》 <sensor_camera parent="base_link"/> 注意 坐标系的依赖。
<robot name="turtlebot" xmlns:xacro="http://ros.org/wiki/xacro">
<xacro:include filename="$(find turtlebot_description)/urdf/turtlebot_library.urdf.xacro" />
<kobuki/>
<!--<stack_hexagons parent="base_link"/>-->
<sensor_rplidar parent="base_link"/>
<sensor_camera parent="base_link"/>
</robot>turtlebot_library.urdf.xacro 每个模块的xacro文件。
<robot xmlns:xacro="http://ros.org/wiki/xacro">
<!-- General -->
<xacro:include filename="$(find turtlebot_description)/urdf/common_properties.urdf.xacro"/>
<xacro:include filename="$(find turtlebot_description)/urdf/turtlebot_properties.urdf.xacro"/>
<!-- Bases -->
<xacro:include filename="$(find create_description)/urdf/create.urdf.xacro"/>
<xacro:include filename="$(find kobuki_description)/urdf/kobuki.urdf.xacro" />
<!-- Stacks -->
<xacro:include filename="$(find turtlebot_description)/urdf/stacks/circles.urdf.xacro"/>
<xacro:include filename="$(find turtlebot_description)/urdf/stacks/hexagons.urdf.xacro"/>
<!-- 3D Sensors -->
<xacro:include filename="$(find turtlebot_description)/urdf/sensors/kinect.urdf.xacro"/>
<xacro:include filename="$(find turtlebot_description)/urdf/sensors/asus_xtion_pro.urdf.xacro"/>
<xacro:include filename="$(find turtlebot_description)/urdf/sensors/asus_xtion_pro_offset.urdf.xacro"/>
<xacro:include filename="$(find turtlebot_description)/urdf/sensors/rplidar.urdf.xacro"/>
<xacro:include filename="$(find turtlebot_description)/urdf/sensors/camera.urdf.xacro"/>
</robot>camera.urdf.xacro ××××××8传感器的信息配置
这里面有两个信息 : 一个是 你要加的模块当做相机的属性信息,gazebo显示。。。。。二是 该模块要具有相机采集环境信息的能力。。相机插件。
同时include上层文件,坐标系统轴就清楚了。。
<?xml version="1.0"?>
<!-- script_version=1.1 -->
<robot name="sensor_camera" xmlns:xacro="http://ros.org/wiki/xacro">
<xacro:include filename="$(find turtlebot_description)/urdf/turtlebot_gazebo.urdf.xacro"/>
<xacro:include filename="$(find turtlebot_description)/urdf/turtlebot_properties.urdf.xacro"/>
<!-- camera -->
<xacro:macro name="sensor_camera" params="parent">
<joint name="camera" type="fixed">
<origin xyz="0.15 0.0 0.35" rpy="0 -1.5708 0.0" />
<parent link="base_link" />
<child link="base_camera_link" />
</joint>
<link name="base_camera_link">
<visual>
<geometry>
<box size="0.05 0.05 0.05" />
</geometry>
<material name="Red" />
</visual>
<inertial>
<mass value="0.000001" />
<origin xyz="0 0 0" />
<inertia ixx="0.0001" ixy="0.0" ixz="0.0"
iyy="0.0001" iyz="0.0"
izz="0.0001" />
</inertial>
</link>
<!-- Set up laser gazebo details -->
<camera_image />
</xacro:macro>
</robot>urtlebot_gazebo.urdf.xacro ==》传感器的信息 plugin 插件参数的修改
<?xml version="1.0"?>
<robot name="turtlebot_gazebo" xmlns:xacro="http://ros.org/wiki/xacro">
<!-- Microsoft Kinect / ASUS Xtion PRO Live for simulation -->
<xacro:macro name="turtlebot_sim_3dsensor">
<gazebo reference="camera_link">
<sensor type="depth" name="camera">
<always_on>true</always_on>
<update_rate>20.0</update_rate>
<camera>
<horizontal_fov>${60.0*M_PI/180.0}</horizontal_fov>
<image>
<format>R8G8B8</format>
<width>640</width>
<height>480</height>
</image>
<clip>
<near>0.05</near>
<far>8.0</far>
</clip>
</camera>
<plugin name="kinect_camera_controller" filename="libgazebo_ros_openni_kinect.so">
<cameraName>camera</cameraName>
<alwaysOn>true</alwaysOn>
<updateRate>10</updateRate>
<imageTopicName>rgb/image_raw</imageTopicName>
<depthImageTopicName>depth/image_raw</depthImageTopicName>
<pointCloudTopicName>depth/points</pointCloudTopicName>
<cameraInfoTopicName>rgb/camera_info</cameraInfoTopicName>
<depthImageCameraInfoTopicName>depth/camera_info</depthImageCameraInfoTopicName>
<frameName>camera_depth_optical_frame</frameName>
<baseline>0.1</baseline>
<distortion_k1>0.0</distortion_k1>
<distortion_k2>0.0</distortion_k2>
<distortion_k3>0.0</distortion_k3>
<distortion_t1>0.0</distortion_t1>
<distortion_t2>0.0</distortion_t2>
<pointCloudCutoff>0.4</pointCloudCutoff>
</plugin>
</sensor>
</gazebo>
</xacro:macro>
<!-- RPLidar LIDAR for simulation -->
<xacro:macro name="rplidar_laser">
<gazebo reference="base_laser_link">
<sensor type="ray" name="laser">
<pose>0 0 0 0 0 0</pose>
<visualize>false</visualize>
<update_rate>5.5</update_rate>
<ray>
<scan>
<horizontal>
<samples>360</samples>
<resolution>1</resolution>
<min_angle>-3.1415926</min_angle>
<max_angle>3.1415926</max_angle>
</horizontal>
</scan>
<range>
<min>0.10</min>
<max>6.0</max>
<resolution>0.01</resolution>
</range>
<noise>
<type>Gaussian</type>
<mean>0.0</mean>
<stddev>0.01</stddev>
</noise>
</ray>
<plugin name="rplidar_node" filename="libgazebo_ros_laser.so">
<topicName>/scan</topicName>
<frameName>base_laser_link</frameName>
</plugin>
</sensor>
</gazebo>
</xacro:macro>
<!-- camera -->
<xacro:macro name="camera_image">
<gazebo reference="base_camera_link">
<sensor type="camera" name="camera1">
<update_rate>30.0</update_rate>
<camera name="head">
<horizontal_fov>1.3962634</horizontal_fov>
<image>
<width>640</width>
<height>480</height>
<format>R8G8B8</format>
</image>
<clip>
<near>0.02</near>
<far>300</far>
</clip>
<noise>
<type>gaussian</type>
<!-- Noise is sampled independently per pixel on each frame.
That pixel's noise value is added to each of its color
channels, which at that point lie in the range [0,1]. -->
<mean>0.0</mean>
<stddev>0.007</stddev>
</noise>
</camera>
<plugin name="camera_controller" filename="libgazebo_ros_camera.so">
<alwaysOn>true</alwaysOn>
<updateRate>30.0</updateRate>
<cameraName>camera1</cameraName>
<imageTopicName>/image_raw</imageTopicName>
<cameraInfoTopicName>/camera_info</cameraInfoTopicName>
<frameName>base_camera_link</frameName>
<hackBaseline>0.07</hackBaseline>
<distortionK1>0.0</distortionK1>
<distortionK2>0.0</distortionK2>
<distortionK3>0.0</distortionK3>
<distortionT1>0.0</distortionT1>
<distortionT2>0.0</distortionT2>
</plugin>
</sensor>
</gazebo>
</xacro:macro>
</robot>
环境变量 ~/.bahsrc
export TURTLEBOT_BASE=kobuki
export TURTLEBOT_STACKS=nostack
#export TURTLEBOT_3D_SENSOR=rplidar
export TURTLEBOT_3D_SENSOR=camera
======
运行显示结果:

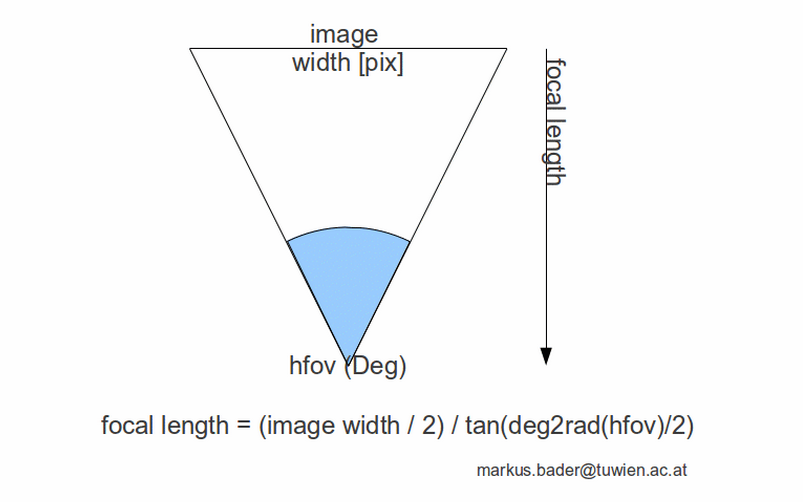
gazebo 仿真中的相机内参说明: 可以用 视角和 像素大小来求 fx fy
例如 640x480 视角1.3962634 : dx =320 dy = 240 fx=381.3612 fy=286.0209
例如 640x480 视角1.3962634 : 应该是认为 水平视角下 求得 f = 381.3612 (fx = fy)
ros中利用gazebo进行gmapping仿真:kobuki+kinct -> kobuki+rplidar
gazebo搭建单目仿真环境:贴有二维码的天花板+kobuki+image(1)
Tutorial: Using Gazebo plugins with ROS
http://gazebosim.org/tutorials?tut=ros_gzplugins
sdf http://sdformat.org/spec?ver=1.5&elem=visual#visual_material
gazebo http://www.gazebosim.org/tutorials?cat=build_world















 764
764

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









