







Livox mid 360 环境配置+连接全流程
产品参数介绍
环境配置
安装配置Livox-SDK2
git clone https://github.com/Livox-SDK/Livox-SDK2.git
cd ./Livox-SDK2/
mkdir build
cd build
cmake .. && make -j
sudo make install
安装配置livox_ros_driver2
mkdir livox_ros_driver2/src
cd livox_ros_driver2/src
git clone https://github.com/Livox-SDK/livox_ros_driver2.git
#构建 livox_ros_driver2驱动程序
source /opt/ros/noetic/setup.sh
./build.sh ROS1
使用livox_ros_driver2
cd livox_ros_driver2/src
source devel/setup.bash
roslaunch livox_ros_driver2 rviz_MID360.launch
rviz_MID360.launch参数解释
给一个可以直接外部指定的实例
roslaunch livox_ros_driver2 rviz_MID360.launch xfer_format:=2 \ data_src=0
lvx_file_path: Livox 雷达录制的 LVX 数据文件路径。
bd_list: 雷达设备的广播码(用于多雷达设备识别)。
xfer_format: 数据格式()。
0 -- Livox pointcloud2(PointXYZRTLT) 点云格式,即 sensor_msgs/PointCloud2
1 -- Livox定制点云格式,即 livox_ros_driver2/CustomMsg
2 -- PCL 库中的标准 pointcloud2 (pcl :: PointXYZI) 点云格式(仅适用于 ROS),即 sensor_msgs/PointCloud2
multi_topic: 是否为每个雷达分配独立 Topic(0 表示合并到单个 Topic)。
data_src: 数据来源(0=雷达实时数据,1=LVX 文件回放)。
publish_freq: 数据发布频率(单位:Hz)。
output_type: 输出数据类型。
rviz_enable: 是否启动 RVIZ 可视化。
rosbag_enable: 是否启用 rosbag 录制所有 Topic。
msg_frame_id: TF 坐标系名称(用于 RVIZ 显示和坐标变换)。
lidar_bag/imu_bag: 是否单独录制雷达或 IMU 数据。
ip设置
连接后修改有线连接

config修改
在livox_ros_driver2/config/MID360_config.json文件夹下
Livox mid360的IP是出厂后已经固定下来的,看它上面的二维码下面的 SN 码 ,后两个数字前面再加一个1,便是其对应的ip。(例如 SN 码后两位数字为26,那它对应的ip就是192.168.1.126)。分别为电脑ip和激光ip根据自己的修改

假如找不到激光的sn码使用wireshark查看mid-360的ip
安装wireshark
sudo apt-get install wireshark
查看连接
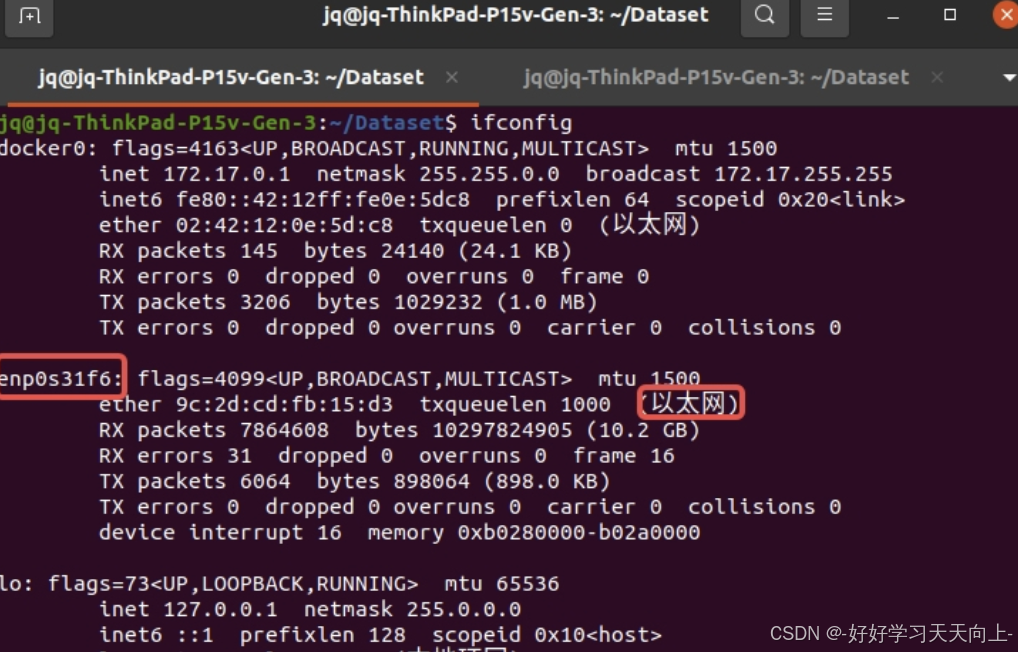
ifconfig
找到对应的以太网口,因为我们和激光是以太网连接的
运行wireshark
sudo wireshark
然后捕获刚刚的网口
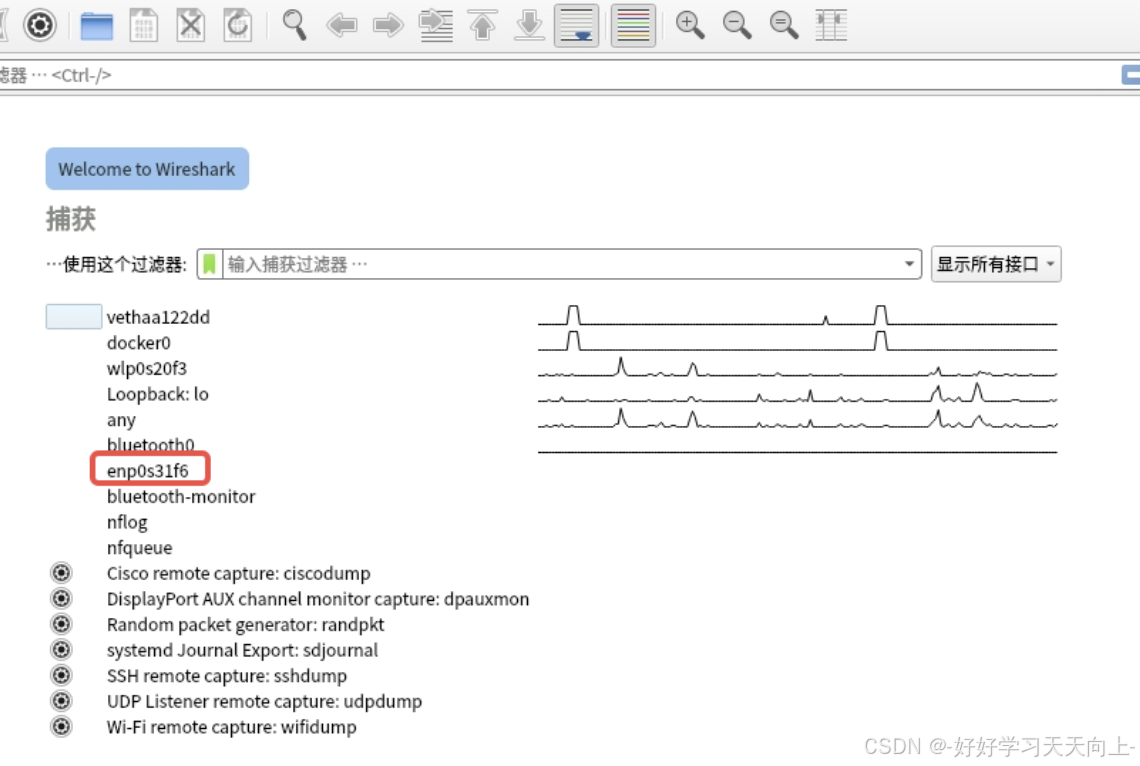
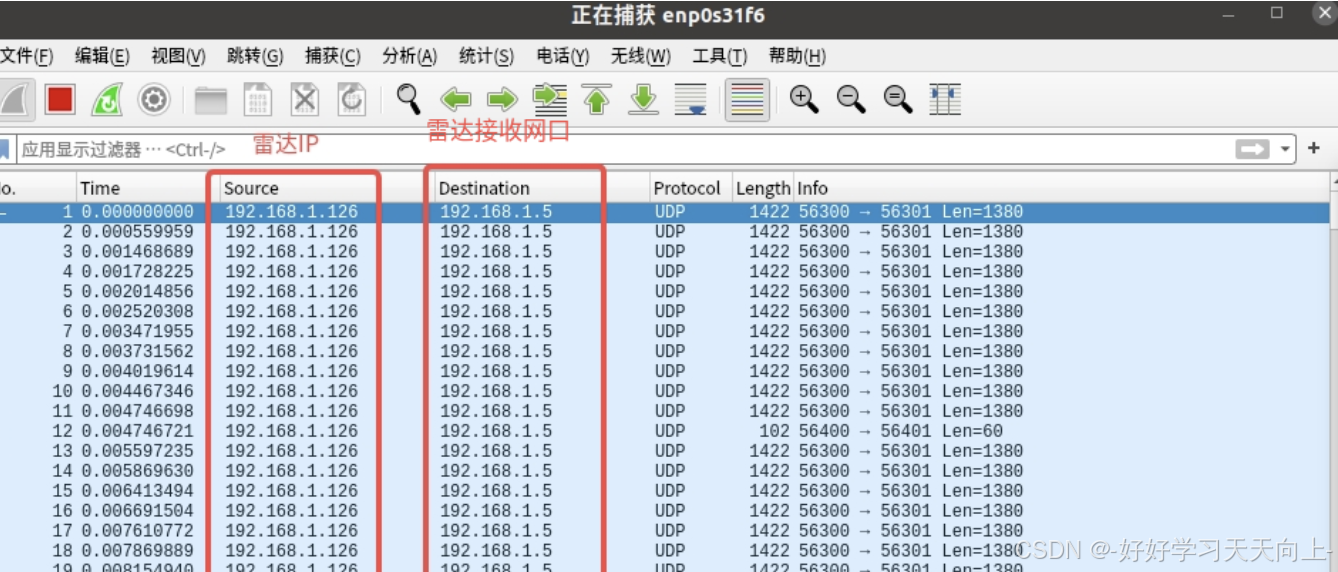
就可以找到激光的ip了

















 4543
4543

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









