






先来说说硬件
主控:香橙派5
飞控:nxtpx4-v2
定位源:T265
这个网上有很多教程,我看了看还是决定记录一下,兴许能够帮助到大家。
方案采用的是VIO来进行t265到mavros的转换
这个源码已经消失了,我从gitee上找到的。
源码链接VIO: 将VIO里程计转换到PX4的mavros/vision/pose话题也可以看看其他的源码,毕竟能用就行
首先从飞控开始,nxtpx4-v2我找了半天,没有找到选择定位源的选项(但是可以正常使用),如果用的其他飞控可以看看这个参数EKF2_AID_MASK
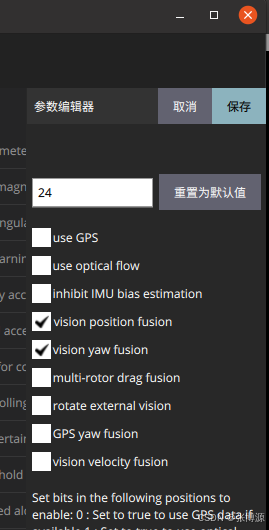
设置成视觉定位和定yaw角
接下来配置香橙派5
1.ros
首先是ros,我还是推荐鱼香ros大佬的一键安装
wget http://fishros.com/install -O fishros && . fishros安装完ros1之后我们来配置realsense
2.安装realsense
这里由于t265版本新的不支持,我们选择2.50版本
并且下方的readme写的很清晰了可以跟着去安装,遇到错误就百度
我用的是noetic,记住安装依赖要对应版本
再贴几个链接Jetson nano+T265+PX4实现室内定点飞行_t265安装位置修改-CSDN博客我觉得这位佬写的还不错
安完之后插上测试一下能够正常启动
roslaunch realsense2_camera rs_t265.launch3.安装mavros
sudo apt install ros-noetic-mavros ros-noetic-mavros-extras怕有人不懂,mavros是为了建立ros和px4连接的一个包启动这个机载电脑就可以连接到px4底层飞控
4.vio
然后去下载vio源码VIO: 将VIO里程计转换到PX4的mavros/vision/pose话题
当时我用vision_to_mavros报错了懒得解决就没用这个,使用的vio
可以跟着下方的readme去部署
接下来根据摄像头的位置去修改参数可以参考px4官方的文档Intel® RealSense™ Tracking Camera T265 (VIO) | PX4 Guide (main)
如果摄像机的镜头朝下安装(默认设置),则VIO桥接包不需要任何配置。
对于任何其他方向,请在修改bridge_mavros.launch中以下部分
<node pkg="tf" type="static_transform_publisher" name="tf_baseLink_cameraPose"
args="0 0 0 0 1.5708 0 base_link camera_pose_frame 1000"/>
这是将ROS中摄像头帧camera_pose_frame链接到mavros无人机帧base_link的静态转换。
前三个参数指定解释为从飞控中心到摄像机的 x,y,z方向,以米为单位。 例如,如果摄像头在飞控前方10cm,上方4cm, 则前三个数字将是:[0.1, 0, 0.04 …]
接下来的三个 参数 是旋转弧度(偏航, 俯仰, 横滚)。 所以 [… 0, 1.5708, 0] 是向下俯仰90度(朝向地面)。 直面是 [… 0 0 0]。
PX4中还需要修改下面三个参数。
EKF2_EV_POS_X, EKF2_EV_POS_Y, EKF2_EV_POS_Z 设置T265相对于机体的位置。
也可以看看超维空间的博客PX4实战之旅(五):利用T265实现室内定点飞行-CSDN博客
配置好了之后就可以source一下首先启动mavros
roslaunch mavros px4.launch(vio_ws是你的工作空间,放vio源码的)
cd ~/vio_ws
catkin_makesource devel/setup.bash
roslaunch px4_realsense_bridge bridge.launch现在可以看一下rostopic
里面如果有一个/mavros/odometru/out话题有稳定数据的话就可以(可以晃晃飞机)
rostopic echo /mavros/odometry/out
此时也可以通过去查看地面站的mavlink检测去查看
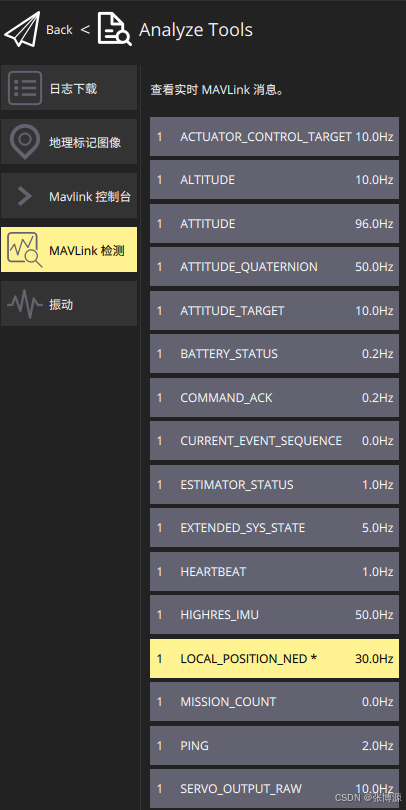
如果有NED这个数据就说明连上了
然后此时飞机可以进入定点模式(手痒的可以飞飞看看)
5.offboard代码控制
这里我用的c++
先来个参考链接MAVROS Offboard 控制示例 (C++) | PX4 Guide (main)
先创建工作空间
mkdir -p off_ws/src
cd off_ws/src
touch offbord.cpp
vi offboard.cpp把代码复制进去
/**
* @file offb_node.cpp
* @brief Offboard control example node, written with MAVROS version 0.19.x, PX4 Pro Flight
* Stack and tested in Gazebo Classic SITL
*/
#include <ros/ros.h>
#include <geometry_msgs/PoseStamped.h>
#include <mavros_msgs/CommandBool.h>
#include <mavros_msgs/SetMode.h>
#include <mavros_msgs/State.h>
mavros_msgs::State current_state;
void state_cb(const mavros_msgs::State::ConstPtr& msg){
current_state = *msg;
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "offb_node");
ros::NodeHandle nh;
ros::Subscriber state_sub = nh.subscribe<mavros_msgs::State>
("mavros/state", 10, state_cb);
ros::Publisher local_pos_pub = nh.advertise<geometry_msgs::PoseStamped>
("mavros/setpoint_position/local", 10);
ros::ServiceClient arming_client = nh.serviceClient<mavros_msgs::CommandBool>
("mavros/cmd/arming");
ros::ServiceClient set_mode_client = nh.serviceClient<mavros_msgs::SetMode>
("mavros/set_mode");
//the setpoint publishing rate MUST be faster than 2Hz
ros::Rate rate(20.0);
// wait for FCU connection
while(ros::ok() && !current_state.connected){
ros::spinOnce();
rate.sleep();
}
geometry_msgs::PoseStamped pose;
pose.pose.position.x = 0;
pose.pose.position.y = 0;
pose.pose.position.z = 2;
//send a few setpoints before starting
for(int i = 100; ros::ok() && i > 0; --i){
local_pos_pub.publish(pose);
ros::spinOnce();
rate.sleep();
}
mavros_msgs::SetMode offb_set_mode;
offb_set_mode.request.custom_mode = "OFFBOARD";
mavros_msgs::CommandBool arm_cmd;
arm_cmd.request.value = true;
ros::Time last_request = ros::Time::now();
while(ros::ok()){
if( current_state.mode != "OFFBOARD" &&
(ros::Time::now() - last_request > ros::Duration(5.0))){
if( set_mode_client.call(offb_set_mode) &&
offb_set_mode.response.mode_sent){
ROS_INFO("Offboard enabled");
}
last_request = ros::Time::now();
} else {
if( !current_state.armed &&
(ros::Time::now() - last_request > ros::Duration(5.0))){
if( arming_client.call(arm_cmd) &&
arm_cmd.response.success){
ROS_INFO("Vehicle armed");
}
last_request = ros::Time::now();
}
}
local_pos_pub.publish(pose);
ros::spinOnce();
rate.sleep();
}
return 0;
}代码解释我就不说了,链接有
我们可以通过更改
geometry_msgs::PoseStamped pose;
pose.pose.position.x = 0;
pose.pose.position.y = 0;
pose.pose.position.z = 2;这个来控制刚起飞的时候无人机的位置
接下来更改cmakelist文件
把src同一目录下的CMakeLists功能包改成
geometry_msgs
mavros_msgs
roscpp
std_msgs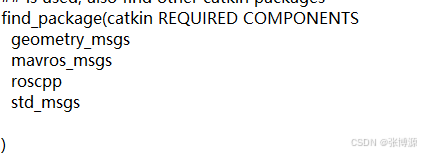
然后我参考这个链接PX4 & Gazebo & Mavros 外部控制画矩形 — 位置+速度话题 - 知乎
通过去等待定时器来选择在某一点悬停时间
也可以直接复制它的代码,我这里就不贴了,直接参考链接就行
记得改CMakeLists
然后在工作空间目录下
catkin_make6.测试
我们首先运行px4
roslaunch mavros px4.launch接下来运行t265和px4桥接 它会自动启动t265
cd vio_ws
source devel/setup.bash
roslaunch px4_realsense_bridge bridge.launch先把遥控器切换到offboard模式
然后启动自己写的offboard代码
cd off_ws
source ./devel/setup.bash
rosrun offboard offboard这里要记得改成自己的节点和代码名字
然后就可以看见无人机自动起飞了


















 3754
3754

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









