






问题描述:可进入offboard模式,但无人机无法起飞。
现象:遥控器切自稳模式和定高模式(GPS闪蓝灯),遥控器可解锁;切到定点模式,GPS闪红灯,且地面站显示报错如下。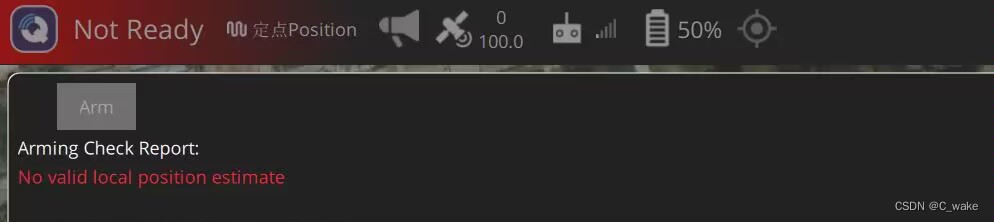
此时没有开启t265的ros节点,猜测飞控可能因为没有获取位置信息而报错。
随后开启t265和px4的ros节点。想获取位置的数据,在命令窗口输入:
rostopic echo /mavros/vision_pose/pose
发现并没有数据的输出。随后进行数据初始化,在命令窗口输入:
roslaunch vision_to_mavros t265_tf_to_mavros.launch
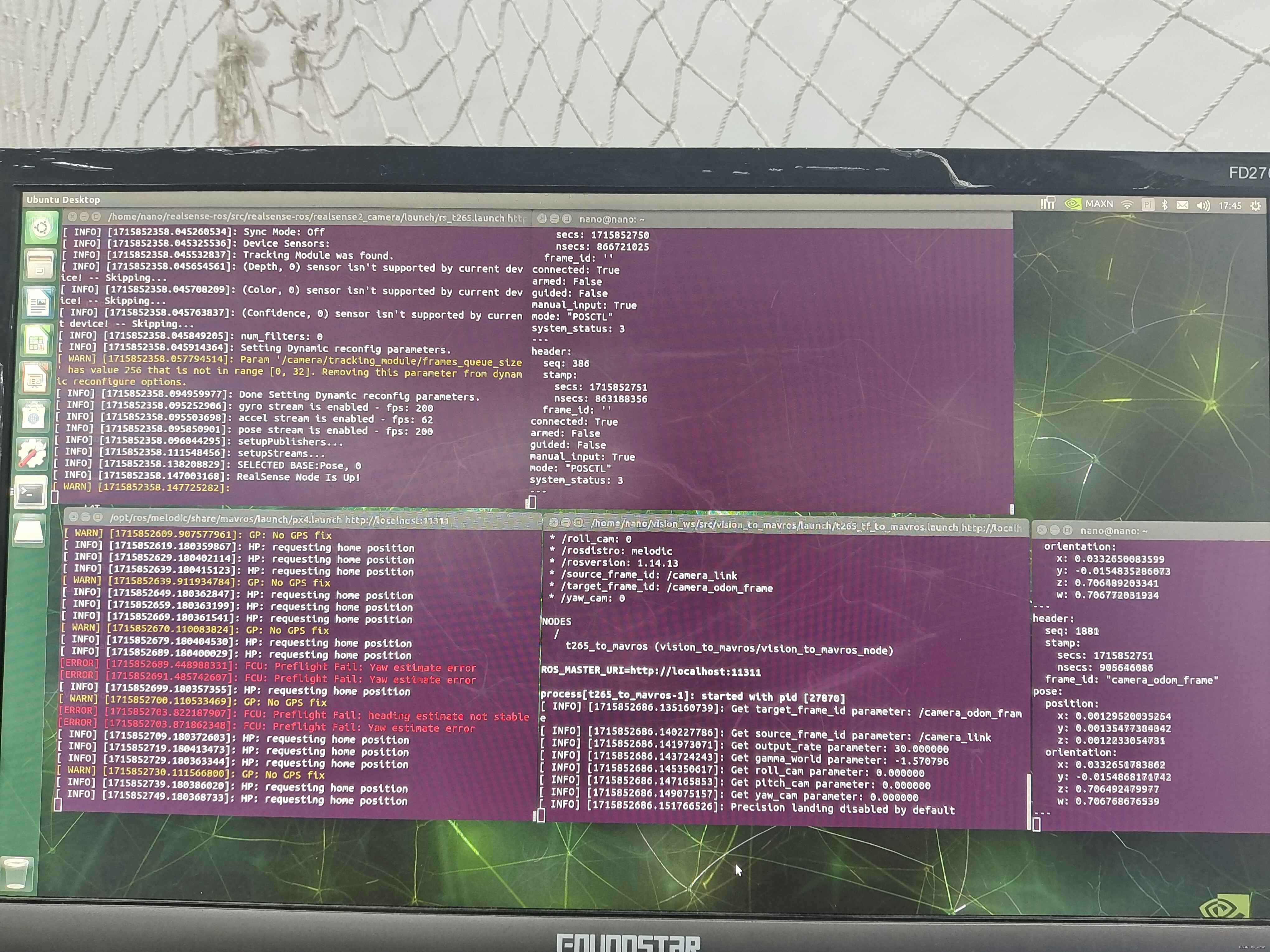
随后,前一个窗口开始获取数据。用遥控器切自稳、定高、定点模式,GPS均闪红灯。遥控器无法解锁。出现新的两个报错,分别是
FCU: Preflight Fail: Yaw estinate error
FCU: Preflight Faill: heading estinate not stable
但上述错误只在刚接入数据时出现。并且地面站无任何报错提示。不清楚错误是否为偶然性错误——有可能因刚接入数据不稳定才报错。
在一个无人机交流群提问,有大佬提示地面站要修改两个参数。(注意:PX4固件版本低于1.14,EKF2_AID_MASK参数才有效)
EKF2_AID_MASK = 24
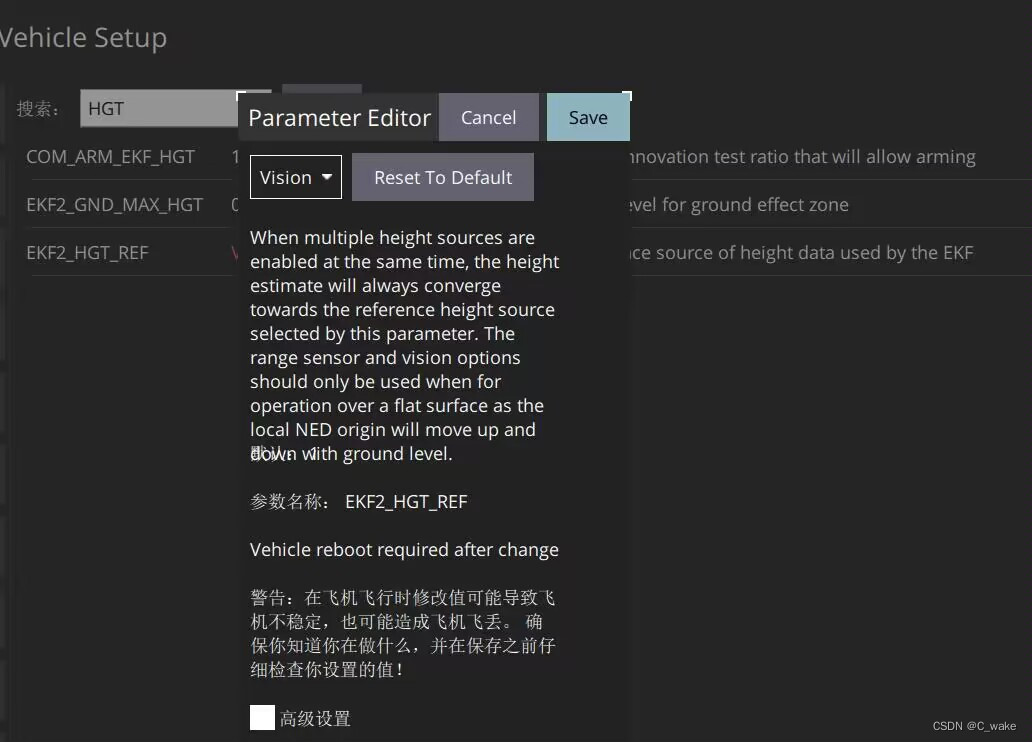
EKF2_HGT_REF = Vision
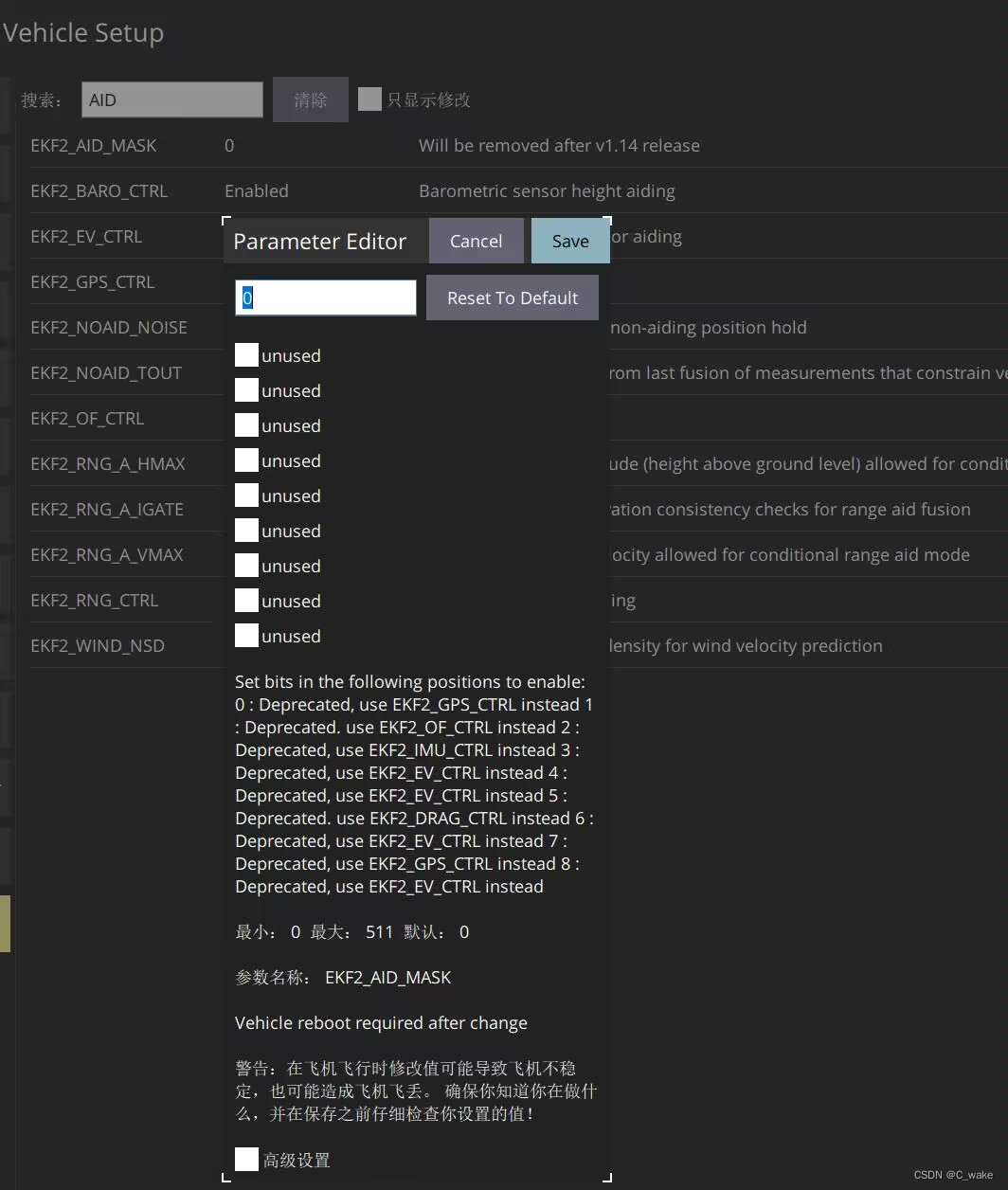
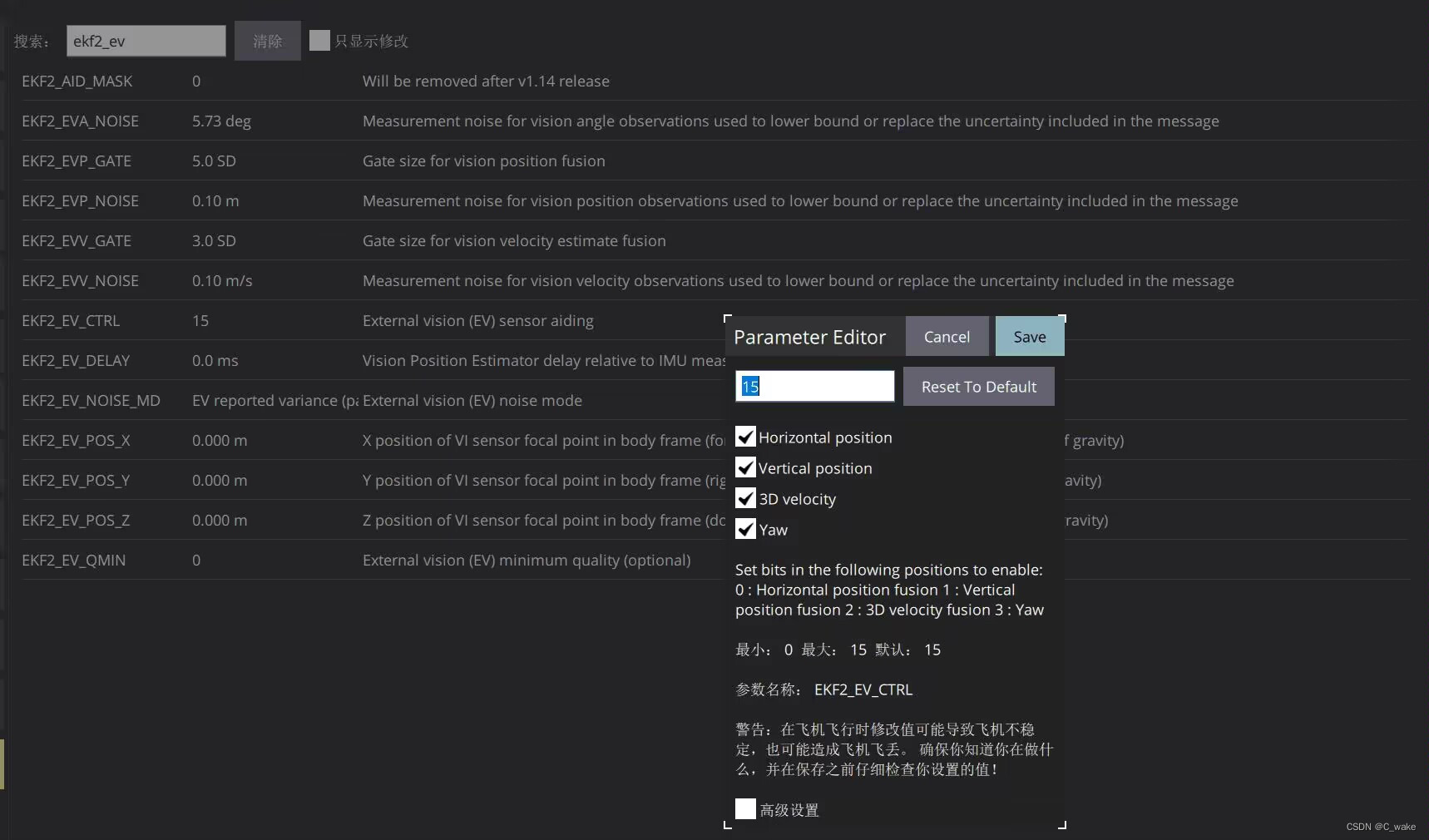
若PX4固件版本为1.14及以后,EKF2_AID_MASK参数已弃用,转为EKF2_EV_CTRL进行设置
上述参数设置好后错误依然存在。
新的疑问:在地面站上看见的视觉里程计(t265)获取参数似乎不太正确,存在nan值。
尝试:想直接从自稳模式切到offboard模式, offboard模式可进,但是电机不转,且GPS边闪红灯边叫。
找到PX4的官方文档有关offboard部分代码示例。问题应该出在解锁部分。具体原因待定。
MAVROS Offboard control example (C++) | PX4 Guide (main)
/**
* @file offb_node.cpp
* @brief Offboard control example node, written with MAVROS version 0.19.x, PX4 Pro Flight
* Stack and tested in Gazebo Classic SITL
*/
#include <ros/ros.h>
#include <geometry_msgs/PoseStamped.h>
#include <mavros_msgs/CommandBool.h>
#include <mavros_msgs/SetMode.h>
#include <mavros_msgs/State.h>
mavros_msgs::State current_state;
void state_cb(const mavros_msgs::State::ConstPtr& msg){
current_state = *msg;
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "offb_node");
ros::NodeHandle nh;
ros::Subscriber state_sub = nh.subscribe<mavros_msgs::State>
("mavros/state", 10, state_cb);
ros::Publisher local_pos_pub = nh.advertise<geometry_msgs::PoseStamped>
("mavros/setpoint_position/local", 10);
ros::ServiceClient arming_client = nh.serviceClient<mavros_msgs::CommandBool>
("mavros/cmd/arming");
ros::ServiceClient set_mode_client = nh.serviceClient<mavros_msgs::SetMode>
("mavros/set_mode");
//the setpoint publishing rate MUST be faster than 2Hz
ros::Rate rate(20.0);
// wait for FCU connection
while(ros::ok() && !current_state.connected){
ros::spinOnce();
rate.sleep();
}
geometry_msgs::PoseStamped pose;
pose.pose.position.x = 0;
pose.pose.position.y = 0;
pose.pose.position.z = 2;
//send a few setpoints before starting
for(int i = 100; ros::ok() && i > 0; --i){
local_pos_pub.publish(pose);
ros::spinOnce();
rate.sleep();
}
mavros_msgs::SetMode offb_set_mode;
offb_set_mode.request.custom_mode = "OFFBOARD";
mavros_msgs::CommandBool arm_cmd;
arm_cmd.request.value = true;
ros::Time last_request = ros::Time::now();
while(ros::ok()){
if( current_state.mode != "OFFBOARD" &&
(ros::Time::now() - last_request > ros::Duration(5.0))){
if( set_mode_client.call(offb_set_mode) &&
offb_set_mode.response.mode_sent){
ROS_INFO("Offboard enabled");
}
last_request = ros::Time::now();
} else {
if( !current_state.armed &&
(ros::Time::now() - last_request > ros::Duration(5.0))){
if( arming_client.call(arm_cmd) &&
arm_cmd.response.success){
ROS_INFO("Vehicle armed");
}
last_request = ros::Time::now();
}
}
local_pos_pub.publish(pose);
ros::spinOnce();
rate.sleep();
}
return 0;
}














 801
801

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









