







上期说到,固定翼飞行器的气动模型是描述其在空气中运动时所受到的空气动力和力矩的数学模型。这个模型通常基于流体力学和空气动力学的原理,以理解和预测飞机的飞行性能。六自由度的运动仿真,也必须先知道固定翼飞行器所受到的所有外力以及外力矩。本文开始讲解气动力矩。
一、外力矩
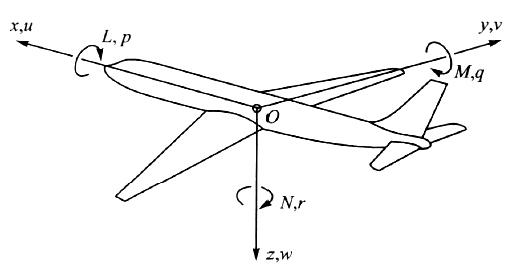
将飞行器总外力矩(气动力矩+发动机偏心力矩)沿机体系下各轴分解, 可以分解为: L , M , N L,M,N L,M,N对应绕 x b x_b xb的滚转力矩,绕 y b y_b yb的俯仰力矩,绕 z b z_b zb的偏航力矩。机体系下三轴滚转角速度分量用 ( p , q , r ) (p,q,r) (p,q,r)表示。
总气动力矩沿机体系下各轴分解, 可以分解为:
L
A
,
M
A
,
N
A
L_A,M_A,N_A
LA,MA,NA对应绕
x
b
x_b
xb的气动滚转力矩,绕
y
b
y_b
yb的气动俯仰力矩,绕
z
b
z_b
zb的气动偏航力矩。机体系下三轴滚转角速度分量用
(
p
,
q
,
r
)
(p,q,r)
(p,q,r)表示。当发动机推力矢量过质心时,
L
,
M
,
N
L,M,N
L,M,N等于
L
A
,
M
A
,
N
A
L_A,M_A,N_A
LA,MA,NA。
二、绕 y y y轴的气动俯仰力矩 M A M_A MA
气动俯仰力矩取决于飞行的速度、高度、迎角、升降舵偏角。此外,当俯仰角速度 q q q、迎角速率 α ˙ \dot{\alpha} α˙和升降舵偏转角速率 δ e ˙ \dot{\delta_e} δe˙不为零时,还会产生附加力矩,称为动态气动俯仰力矩。
气动俯仰力矩可以写为:
M
A
=
f
(
V
,
h
,
a
,
δ
e
,
q
,
α
˙
,
δ
e
˙
)
M
A
=
C
m
(
1
2
ρ
V
2
)
S
W
c
A
\begin{align*} M_A&=f(V,h,a,\delta_e,q,\dot{\alpha},\dot{\delta_e})\\ M_A&=C_m(\frac{1}{2}\rho V^2)S_Wc_A\\ \end{align*}
MAMA=f(V,h,a,δe,q,α˙,δe˙)=Cm(21ρV2)SWcA
式中,
C
m
C_m
Cm为俯仰力矩系数,
S
W
S_W
SW为机翼参考面积,
c
A
c_A
cA为机翼的平均几何弦长。
C
m
=
C
m
0
+
C
m
α
α
+
C
m
δ
e
δ
e
+
C
m
q
‾
q
‾
+
C
m
α
˙
‾
α
˙
+
C
m
δ
e
˙
‾
δ
e
˙
=
C
m
0
+
C
m
α
α
+
C
m
δ
e
δ
e
+
C
m
q
‾
(
q
c
A
2
V
)
+
C
m
α
˙
‾
(
α
˙
c
A
2
V
)
+
C
m
δ
e
˙
‾
(
δ
e
˙
c
A
2
V
)
\begin{align*} C_m&=C_{m_0}+C_m^{\alpha}\alpha+C_m^{\delta_e}\delta_e+C_m^{\overline{q}}\overline{q}+C_m^{\overline{\dot{\alpha}}}\dot{\alpha}+C_m^{\overline{\dot{\delta_e}}}\dot{\delta_e}\\ &=C_{m_0}+C_m^{\alpha}\alpha+C_m^{\delta_e}\delta_e+C_m^{\overline{q}}(\frac{qc_A}{2V})+C_m^{\overline{\dot{\alpha}}}(\frac{\dot{\alpha} c_A}{2V})+C_m^{\overline{\dot{\delta_e}}}(\frac{\dot{\delta_e} c_A}{2V}) \end{align*}
Cm=Cm0+Cmαα+Cmδeδe+Cmqq+Cmα˙α˙+Cmδe˙δe˙=Cm0+Cmαα+Cmδeδe+Cmq(2VqcA)+Cmα˙(2Vα˙cA)+Cmδe˙(2Vδe˙cA)
式中: q ‾ = q c A 2 V , α ˙ ‾ = α ˙ c A 2 V \overline{q}=\frac{qc_A}{2V},\overline{\dot{\alpha}}=\frac{\dot{\alpha} c_A}{2V} q=2VqcA,α˙=2Vα˙cA, δ e ˙ ‾ = δ e ˙ c A 2 V \overline{\dot{\delta_e}}=\frac{\dot{\delta_e} c_A}{2V} δe˙=2Vδe˙cA为量纲归一化量。(注:在部分资料中有 q ‾ = q L V \overline{q}=\frac{qL}{V} q=VqL,区别在于特征长度选取方式不同,相对应的系数则成比例 c _ A 2 L \frac{c\_A}{2L} 2Lc_A)
- 定常直线平飞的俯仰力矩
定常直线平飞的情况下,
q
=
α
˙
=
δ
e
˙
=
0
q=\dot{\alpha}=\dot{\delta_e}=0
q=α˙=δe˙=0,俯仰力矩变为:
C
m
=
C
m
0
+
C
m
α
α
+
C
m
δ
e
δ
e
C_m=C_{m_0}+C_m^{\alpha}\alpha+C_m^{\delta_e}\delta_e
Cm=Cm0+Cmαα+Cmδeδe
此时,令
C
m
=
0
C_m=0
Cm=0,可以得到俯仰配平的舵偏
δ
e
=
−
C
m
0
−
C
m
α
α
C
m
δ
e
\delta_e=\frac{-C_{m_0}-C_m^{\alpha}\alpha}{C_m^{\delta_e}}
δe=Cmδe−Cm0−Cmαα。(注:在小迎角、小舵偏的情况下才成立)
- 纵向静稳定性分析
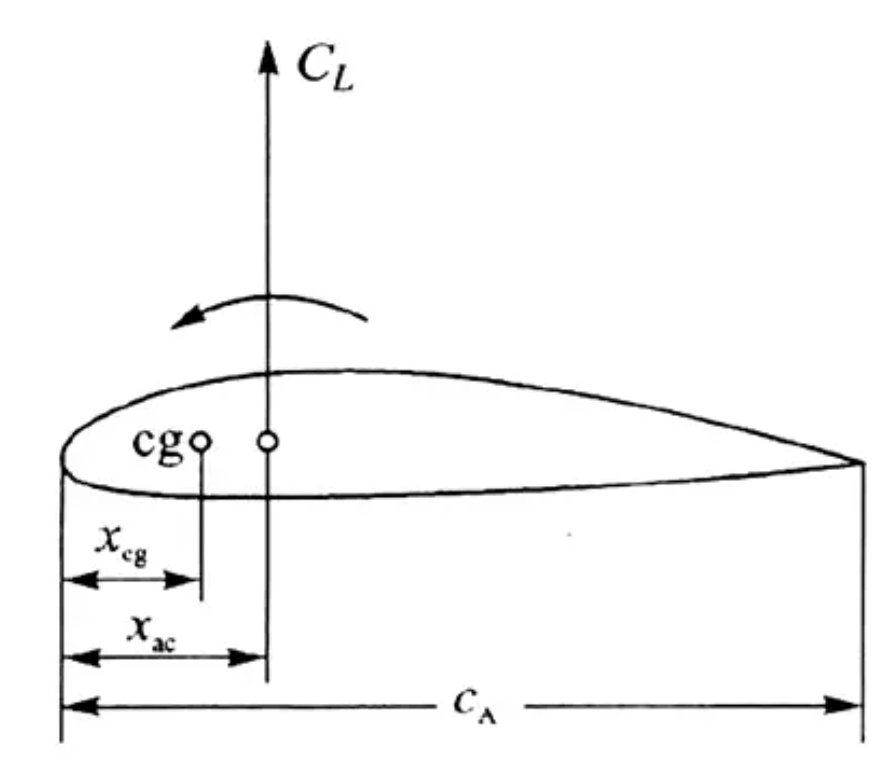
俯仰力矩中 C m α α C_m^{\alpha}\alpha Cmαα项为迎角变化引起的俯仰力矩变化,将该项俯仰力矩写成力系数乘以力臂的形式可以得到:
C m α α = C L ( x ‾ c g − x ‾ a c ) C_m^{\alpha}\alpha=C_L(\overline{x}_{cg}-\overline{x}_{ac}) Cmαα=CL(xcg−xac)
式中 x ‾ c g = x c g c A , x ‾ a c = x a c c A \overline{x}_{cg}=\frac{x_{cg}}{c_A},\overline{x}_{ac}=\frac{x_{ac}}{c_A} xcg=cAxcg,xac=cAxac, x c g x_{cg} xcg为重心到平均几何弦前缘点距离, x a c x_{ac} xac为气动中心(焦点)到平均几何弦前缘点的距离。
将上式两边对 α \alpha α求导:
C
m
α
=
∂
C
L
∂
α
(
x
‾
c
g
−
x
‾
a
c
)
=
C
L
α
(
x
‾
c
g
−
x
‾
a
c
)
C_m^{\alpha}=\frac{ \partial C_L }{ \partial \alpha }(\overline{x}_{cg}-\overline{x}_{ac})=C_L^{\alpha}(\overline{x}_{cg}-\overline{x}_{ac})
Cmα=∂α∂CL(xcg−xac)=CLα(xcg−xac)
根据上一篇关于气动力文章的讲解中,
C
L
α
C_L^{\alpha}
CLα为升力线斜率,且
C
L
α
>
0
C_L^{\alpha}>0
CLα>0。
- C m α < 0 C_m^{\alpha}<0 Cmα<0,即 x ‾ c g < x ‾ a c \overline{x}_{cg}<\overline{x}_{ac} xcg<xac,重心在气动焦点之前。当迎角 α \alpha α增大时,负的 C m α C_m^{\alpha} Cmα将产生低头力矩,即 M A < 0 M_A<0 MA<0,使 α \alpha α减小。因此飞行器是纵向静稳定的。
- C m α > 0 C_m^{\alpha}>0 Cmα>0,即 x ‾ c g > x ‾ a c \overline{x}_{cg}>\overline{x}_{ac} xcg>xac,重心在气动焦点之后。当迎角 α \alpha α增大时,正的 C m α C_m^{\alpha} Cmα将产生抬头力矩,即 M A > 0 M_A>0 MA>0,使 α \alpha α增大。因此飞行器是纵向静不稳定的。
- C m α = 0 C_m^{\alpha}=0 Cmα=0,即 x ‾ c g = x ‾ a c \overline{x}_{cg}=\overline{x}_{ac} xcg=xac,重心与气动焦点重合。此情况下,为纵向中立静稳定。
鉴于上述特性,定义 C m α C_m^{\alpha} Cmα为纵向静稳定性导数, x ‾ a c − x ‾ c g \overline{x}_{ac}-\overline{x}_{cg} xac−xcg为静稳定度。
- 其他项俯仰力矩
- C m δ e δ e C_m^{\delta_e}\delta_e Cmδeδe为升降舵偏角引起的俯仰力矩变化,称为俯仰操纵力矩。
- C m q ‾ q ‾ C_m^{\overline{q}}\overline{q} Cmqq为飞行器绕 y 轴转动而产生的附加俯仰力矩,称为俯仰阻尼力矩。
- C m α ˙ ‾ α ˙ C_m^{\overline{\dot{\alpha}}}\dot{\alpha} Cmα˙α˙, C m δ e ˙ ‾ δ e ˙ C_m^{\overline{\dot{\delta_e}}}\dot{\delta_e} Cmδe˙δe˙为 α ˙ ≠ 0 , δ e ˙ ≠ 0 \dot{\alpha}\ne0,\dot{\delta_e}\ne0 α˙=0,δe˙=0情况下,由于气流下洗导致气流不能及时到达翼面而产生的阻尼力矩,称为下洗时差阻尼力矩(下洗延迟俯仰力矩)。
三、绕 x x x轴的气动滚转力矩 L A L_A LA
气动滚转力矩、气动滚转力矩系数可以写为:
L
A
=
C
l
(
1
2
ρ
V
2
)
S
W
b
L_A=C_l(\frac{1}{2}\rho V^2)S_Wb
LA=Cl(21ρV2)SWb
C
l
=
C
l
β
β
+
C
l
δ
a
δ
a
+
C
l
δ
r
δ
r
+
C
l
p
‾
p
‾
+
C
l
r
‾
r
‾
C_l=C_l^{\beta}\beta+C_l^{\delta_a}\delta_a+C_l^{\delta_r}\delta_r+C_l^{\overline{p}}\overline{p}+C_l^{\overline{r}}\overline{r}
Cl=Clββ+Clδaδa+Clδrδr+Clpp+Clrr
对应于侧力所引起的力矩关系,绕 x x x轴的气动滚转力矩 L A L_A LA包括:
- 由侧滑角 β \beta β引起的气动滚转力矩 L A ( β ) L_A(\beta) LA(β);
- 由副翼偏转角 δ e \delta_e δe引起的气动滚转力矩 L A ( δ e ) L_A(\delta_e) LA(δe);
- 由方向舵偏转角 δ r \delta_r δr引起的气动滚转力矩 L A ( δ r ) L_A(\delta_r) LA(δr);
- 由滚转角速度 p p p引起的气动滚转力矩 L A ( p ) L_A(p) LA(p);
- 由偏航角速度 r r r引起的气动滚转力矩 L A ( r ) L_A(r) LA(r)。
- 侧滑角 β \beta β引起的气动滚转力矩 L A ( β ) L_A(\beta) LA(β)
气动滚转力矩 L A ( β ) L_A(\beta) LA(β)主要由机翼和垂尾在侧滑角 β \beta β时产生,其表示式为:
L
A
(
β
)
=
C
l
β
(
1
2
ρ
V
2
)
S
W
b
β
L_A(\beta)=C_l^{\beta}(\frac{1}{2}\rho V^2)S_W b \beta
LA(β)=Clβ(21ρV2)SWbβ
式中,
C
l
β
=
∂
C
l
∂
β
C_l^{\beta}=\frac{ \partial C_l }{ \partial \beta}
Clβ=∂β∂Cl为滚转操纵导数,
S
W
S_W
SW和
b
b
b分别为机翼参考面积和机翼展长。
参考俯仰力矩中,纵向静稳定性分析,滚转力矩中 C l β β C_l^{\beta}\beta Clββ 项为横向静稳定项, C l β C_l^{\beta} Clβ为横向静稳定性导数。
如上图所示(面向飞机头部),当有扰动使 ϕ > 0 \phi>0 ϕ>0时,升力 L L L与重力 G G G的合力使得飞行器向中心侧滑,产生正侧滑角 β > 0 \beta>0 β>0。若 C l β < 0 C_l^{\beta}<0 Clβ<0,则产生负的滚转力矩 L A ( β ) < 0 L_A(\beta)<0 LA(β)<0,使得 ϕ → 0 \phi \rightarrow 0 ϕ→0。
- C l β < 0 C_l^{\beta}<0 Clβ<0, ϕ > 0 → β > 0 \phi>0 \rightarrow \beta>0 ϕ>0→β>0,负的 C l β C_l^{\beta} Clβ将产生负的滚转力矩,即 L A < 0 L_A<0 LA<0,使 ϕ → 0 \phi \rightarrow 0 ϕ→0。因此飞行器是横向静稳定的。
- C l β > 0 C_l^{\beta}>0 Clβ>0, ϕ > 0 → β > 0 \phi>0 \rightarrow \beta>0 ϕ>0→β>0,正的 C l β C_l^{\beta} Clβ将产生正的滚转力矩,即 L A > 0 L_A>0 LA>0,使 ϕ ↑ \phi \uparrow ϕ↑增大。因此飞行器是横向静不稳定的。
- C l β = 0 C_l^{\beta}=0 Clβ=0,此情况下,为横向中立静稳定。
横向静稳定性与机翼的上/下反角,前/后略翼,垂尾的安装位置有关。由于文章篇幅原因,这里直接给出结论。(注:仅有下反角或前掠翼不代表整个系数 C l β > 0 C_l^{\beta}>0 Clβ>0,需要综合考虑有无后掠翼。对于有上反角且后掠翼且垂尾安装于 x x x轴之上,有 C l β < 0 C_l^{\beta}<0 Clβ<0;对于有下反角且前掠翼且垂尾安装于 x x x轴之下,有 C l β > 0 C_l^{\beta}>0 Clβ>0)
- 上反角, C l β < 0 C_l^{\beta}<0 Clβ<0;下反角, C l β > 0 C_l^{\beta}>0 Clβ>0;
- 后掠翼, C l β < 0 C_l^{\beta}<0 Clβ<0;前掠翼, C l β > 0 C_l^{\beta}>0 Clβ>0;
- 垂尾安装于 x x x轴之上, C l β < 0 C_l^{\beta}<0 Clβ<0;垂尾安装于 x x x轴之下, C l β > 0 C_l^{\beta}>0 Clβ>0。
- 副翼偏转角 δ a \delta_a δa引起的气动滚转力矩 L A ( δ a ) L_A(\delta_a) LA(δa)
副翼偏转角 δ a \delta_a δa引起的气动滚转力矩 L A ( δ a ) L_A(\delta_a) LA(δa)称为滚转操纵力矩,是操纵飞行器产生滚转运动的主要措施。其表达式为:
L A ( δ a ) = C l δ a ( 1 2 ρ V 2 ) S W b δ a L_A(\delta_a)=C_l^{\delta_a}(\frac{1}{2} \rho V^2)S_Wb\delta_a LA(δa)=Clδa(21ρV2)SWbδa
式中, C l δ a = ∂ C l ∂ δ a C_l^{\delta_a}=\frac{ \partial C_l }{ \partial \delta_a } Clδa=∂δa∂Cl为滚转操纵导数。
当副翼正向偏转 δ a > 0 \delta_a>0 δa>0,即“左上右下”偏转时,相当于右机翼的翼型弯度增大,左机翼的翼型弯度减小,所以右机翼的升力增大,而左机翼的升力减小,故将产生负的气动滚转力矩 L A ( δ a ) < 0 L_A(\delta_a)<0 LA(δa)<0,因此滚转操纵导数 C l δ a < 0 C_l^{\delta_a}<0 Clδa<0为负值。
- 方向舵偏转角 δ r \delta_r δr引起的气动滚转力矩 L A ( δ r ) L_A(\delta_r) LA(δr)
方向舵偏转角 δ r \delta_r δr引起的气动滚转力矩 L A ( δ r ) L_A(\delta_r) LA(δr)称为操纵交叉力矩,其表达式为:
L A ( δ r ) = C l δ r ( 1 2 ρ V 2 ) S W b δ r L_A(\delta_r)=C_l^{\delta_r}(\frac{1}{2} \rho V^2)S_Wb\delta_r LA(δr)=Clδr(21ρV2)SWbδr
式中, C l δ r = ∂ C l ∂ δ r C_l^{\delta_r}=\frac{ \partial C_l }{ \partial \delta_r } Clδr=∂δr∂Cl为方向舵操纵交叉导数。
当方向正向偏转 δ a > 0 \delta_a>0 δa>0时,方向的后缘将向左偏转产生正的侧力。如果方向舵位于 x x x轴之上(一般气动布局的方向舵都在 x x x轴之上),则产生正向气动滚转力矩 L A ( δ r ) > 0 L_A(\delta_r)>0 LA(δr)>0,因此 C l δ r > 0 C_l^{\delta_r}>0 Clδr>0 为正值。
- 滚转角速度 p p p引起的气动滚转力矩 L A ( p ) L_A(p) LA(p)
滚转角速度 p p p引起的气动滚转力矩 L A ( p ) L_A(p) LA(p)又称为滚转阻尼力矩,其表达式为:
L
A
(
p
)
=
C
l
p
‾
(
1
2
ρ
V
2
)
S
W
b
p
‾
L_A(p)=C_l^{\overline{p}}(\frac{1}{2} \rho V^2)S_Wb\overline{p}
LA(p)=Clp(21ρV2)SWbp
式中,
C
l
p
‾
=
∂
C
l
∂
p
‾
C_l^{\overline{p}}=\frac{ \partial C_l }{ \partial \overline{p} }
Clp=∂p∂Cl为滚转阻尼导数,
p
‾
=
p
b
2
V
\overline{p}=\frac{pb}{2V}
p=2Vpb为量纲一的滚转角速度。
由滚转角速度 p p p引起的气动滚转力矩 L A ( p ) L_A(p) LA(p)主要由机翼产生,此外,平尾和垂尾也有一些影响。下面主要讨论机翼产生气动滚转力矩 L A ( p ) L_A(p) LA(p)的机理。
设飞行器正向滚转,即 p > 0 p>0 p>0,向右滚转,右机翼下行,左机翼上行。因为下行速度分量与空速 V V V叠加,形成一个迎角增大了的速度合量,所以下行翼面的迎角增加,升力也增加;反之,上升翼面的迎角减小,升力也减小。这样,右机翼升力增加,左机翼升力减小,形成了一个负的气动滚转力矩 L A ( p ) < 0 L_A(p)<0 LA(p)<0,因为该负的气动滚转力矩 L A ( p ) L_A(p) LA(p)将起到阻止飞行器正向滚转的作用,故称为滚转阻尼力矩,所以其滚转阻尼导数 C l p ‾ < 0 C_l^{\overline{p}}<0 Clp<0为负值。
- 偏航角速度 r r r引起的气动滚转力矩 L A ( r ) L_A(r) LA(r)
偏航角速度 r r r引起的气动滚转力矩 L A ( r ) L_A(r) LA(r)又称为交叉动态力矩,其表达式为:
L
A
(
r
)
=
C
l
r
‾
(
1
2
ρ
V
2
)
S
W
b
r
‾
L_A(r)=C_l^{\overline{r}}(\frac{1}{2} \rho V^2)S_Wb\overline{r}
LA(r)=Clr(21ρV2)SWbr
式中,
C
l
r
‾
=
∂
C
l
∂
r
‾
C_l^{\overline{r}}=\frac{ \partial C_l }{ \partial \overline{r} }
Clr=∂r∂Cl为交叉动导数,
r
‾
=
r
b
2
V
\overline{r}=\frac{rb}{2V}
r=2Vrb为量纲一的偏航角速度。
设偏航角速度 r > 0 r>0 r>0,即左机翼向前,右机翼向后。首先,分析当存在正的偏航角速度 r > 0 r>0 r>0时机翼所产生的气动滚转力矩 L A ( r ) L_A(r) LA(r)。由于左机翼向前运动所以其对空速增加,升力也增加;反之,右机(弹)翼的升力降低。因此就形成了正的气动滚转力知 L A ( r ) > 0 L_A(r)>0 LA(r)>0。
其次,分析当存在正的偏航角速度 r > 0 r>0 r>0时垂尾所产生的气动滚转力矩 L A ( r ) L_A(r) LA(r)。当偏航速度 r > 0 r>0 r>0时,垂尾将产生局部的负向侧滑角( β < 0 \beta<0 β<0),因此,将产生正的侧力,如果垂尾位于 x x x轴之上,则产生正的气动滚转力矩 L A ( r ) > 0 L_A(r)>0 LA(r)>0。所以,对于正的偏航角速度 r > 0 r>0 r>0,将产生的气动滚转力矩 L A ( r ) > 0 L_A(r)>0 LA(r)>0,所以,交叉动导数 C l r ‾ > 0 C_l^{\overline{r}}>0 Clr>0为正值。
四、绕 z z z轴的气动偏航力矩 N A N_A NA
气动偏航力矩、气动偏航力矩系数可以写为:
N
A
=
C
n
(
1
2
ρ
V
2
)
S
W
b
C
n
=
C
n
β
β
+
C
n
δ
a
δ
a
+
C
n
δ
r
δ
r
+
C
n
p
‾
p
‾
+
C
n
r
‾
r
‾
\begin{align*} N_A&=C_n(\frac{1}{2}\rho V^2)S_Wb\\ C_n&=C_n^{\beta}\beta+C_n^{\delta_a}\delta_a+C_n^{\delta_r}\delta_r+C_n^{\overline{p}}\overline{p}+C_n^{\overline{r}}\overline{r}\\ \end{align*}
NACn=Cn(21ρV2)SWb=Cnββ+Cnδaδa+Cnδrδr+Cnpp+Cnrr
对应于侧力所引起的力矩关系,绕 z z z轴的气动偏航力矩 N A N_A NA包括:
- 由侧滑角 β \beta β引起的气动偏航力矩 N A ( β ) N_A(\beta) NA(β);
- 由副翼偏转角 δ e \delta_e δe引起的气动偏航力矩 N A ( δ e ) N_A(\delta_e) NA(δe);
- 由方向舵偏转角 δ r \delta_r δr引起的气动偏航力矩 N A ( δ r ) N_A(\delta_r) NA(δr);
- 由滚转角速度 p p p引起的气动偏航力矩 N A ( p ) N_A(p) NA(p);
- 由偏航角速度 r r r引起的气动偏航力矩 N A ( r ) N_A(r) NA(r)。
- 侧滑角 β \beta β引起的气动偏航力矩 N A ( β ) N_A(\beta) NA(β)
由侧滑角 β \beta β引起的气动偏航力矩 N A ( β ) N_A(\beta) NA(β)又称为航向静稳定力矩其表达式为:
N
A
(
β
)
=
C
n
β
(
1
2
ρ
V
2
)
S
W
b
β
N_A(\beta)=C_n^{\beta}(\frac{1}{2}\rho V^2)S_Wb \beta
NA(β)=Cnβ(21ρV2)SWbβ
式中,
C
n
β
=
∂
C
n
∂
β
C_n^{\beta}=\frac{ \partial C_n}{ \partial {\beta} }
Cnβ=∂β∂Cn为航向静稳定性导数。
假设飞行器存在右侧滑运动,即 β > 0 \beta>0 β>0。右侧滑运动时 β > 0 \beta>0 β>0,垂尾将产生一个负值的侧力 Y ( β ) < 0 Y(\beta)<0 Y(β)<0由于垂尾在飞行器重心的后方,所以产生一个正的气动偏航力矩 N A ( β ) N_A(\beta) NA(β)并使侧滑角 β \beta β减小,因此 N A ( β ) N_A(\beta) NA(β)是一个稳定的气动偏航力矩。稳定的气动偏航力矩 N A ( β ) N_A(\beta) NA(β)在使侧滑角 β \beta β减小(恢复)的同时却使机头转到了新的方向,只对速度轴方向起稳定作用。所以,有时也将该部分气动偏航力矩 N A ( β ) N_A(\beta) NA(β)称为风标稳定性力矩。
- C n β > 0 C_n^{\beta}>0 Cnβ>0,当 β > 0 \beta >0 β>0时,正的 C n β C_n^{\beta} Cnβ将产生正的偏航力矩,即 N A > 0 N_A>0 NA>0,使 β \beta β减小。因此飞行器是航向静稳定的。
- C n β < 0 C_n^{\beta}<0 Cnβ<0,当 β > 0 \beta>0 β>0时,负的 C n β C_n^{\beta} Cnβ将产生负的偏航力矩,即 N A < 0 N_A<0 NA<0,使 β \beta β增大。因此飞行器是航向静不稳定的。
- C l β = 0 C_l^{\beta}=0 Clβ=0,此情况下,为横向中立静稳定。
- 副翼偏转角 δ a \delta_a δa引起的气动偏航力矩 N A ( δ a ) N_A(\delta_a) NA(δa)
由副翼偏转角 δ a \delta_a δa引起的气动偏航力矩 N A ( δ a ) N_A(\delta_a) NA(δa)又称为操纵交叉力矩。
操纵副翼是为了使飞行器产生滚转运动,面对称气动布局飞行器的滚转运动会使垂尾产生偏航力矩,在飞行器的偏航运动与滚转运动之间存在着耦合作用。操纵交叉力矩的表达式为:
N A ( δ a ) = C n δ a ( 1 2 ρ V 2 ) S W b δ a N_A(\delta_a)=C_n^{\delta_a}(\frac{1}{2}\rho V^2)S_Wb \delta_a NA(δa)=Cnδa(21ρV2)SWbδa
式中, C n δ a = ∂ C n ∂ δ a C_n^{\delta_a}=\frac{ \partial C_n }{ \partial \delta_a } Cnδa=∂δa∂Cn为副翼操纵交叉导数,其符号需根据产生正、负力矩的定义而定。
- 方向舵偏转角 δ r \delta_r δr引起的气动偏航力矩 N A ( δ r ) N_A(\delta_r) NA(δr)
由方向舵偏转角 δ r \delta_r δr引起的气动偏航力矩 N A ( δ r ) N_A(\delta_r) NA(δr)又称为航向操纵力矩,此力矩是操纵飞行器产生偏转运动的主要措施。航向操纵力矩的表达式为:
N
A
(
δ
r
)
=
C
n
δ
r
(
1
2
ρ
V
2
)
S
W
b
δ
r
N_A(\delta_r)=C_n^{\delta_r}(\frac{1}{2}\rho V^2)S_Wb \delta_r
NA(δr)=Cnδr(21ρV2)SWbδr
式中,
C
n
δ
r
=
∂
C
n
∂
δ
r
C_n^{\delta_r}=\frac{ \partial C_n }{ \partial \delta_r }
Cnδr=∂δr∂Cn为航向操纵导数,其值为负。
设方向舵正向偏转,即 δ r > 0 \delta_r>0 δr>0,方向舵后缘向左偏转,则垂尾将产生一个正的侧力。由于垂尾在飞行器重心之后,所以产生负的气动偏航力矩 N A ( δ r ) < 0 N_A(\delta_r)<0 NA(δr)<0,因此航向操纵导数 C n δ r < 0 C_n^{\delta_r}<0 Cnδr<0为负值。
- 滚转角速度 p p p引起的气动偏航力矩 N A ( p ) N_A(p) NA(p)
由滚转角速度 p p p引起的气动偏航力矩$ N_A§ 又称为交叉动态力矩。 又称为交叉动态力矩。 又称为交叉动态力矩。N_A§$的表示式为:
N
A
(
p
)
=
C
n
p
‾
(
1
2
ρ
V
2
)
S
W
b
p
‾
N_A(p)=C_n^{\overline{p}}(\frac{1}{2}\rho V^2)S_Wb \overline{p}
NA(p)=Cnp(21ρV2)SWbp
式中,$C_n^{\overline{p}}=\frac{ \partial C_n }{ \partial \overline{p} }
为交叉动导数,
为交叉动导数,
为交叉动导数,\overline{p}=\frac{pb}{2V} $为量纲一的滚转角速度。
气动偏航力矩 N _ A ( p ) N\_A(p) N_A(p)主要由机翼和垂尾两部分产生。
垂尾分析:飞行器向右滚转运动时,滚转角速度 p > 0 p>0 p>0,垂尾处产生局部侧滑角 β > 0 \beta>0 β>0,产生负的侧力 Y ( β ) < 0 Y(\beta)<0 Y(β)<0,产生正的气动偏航力矩 N A ( p ) > 0 N_A(p)>0 NA(p)>0。因此,对于垂尾而言, ( C n p ‾ ) v > 0 (C_n^{\overline{p}})_v>0 (Cnp)v>0为正值。一般情况下,机翼对交叉动导数 C n p ‾ C_n^{\overline{p}} Cnp的影响较为复杂,下面就仅对其形成原理进行讨论。
机翼分析:设飞行器向右滚转运动,即存在正的滚转角速度 p > 0 p>0 p>0,且迎角 α \alpha α较小,当副翼负向偏转即 δ a < 0 \delta_a<0 δa<0,为“左下右上”操纵时,飞行器的右机翼下行运动,有一个向下的速度增量 Δ V 下 \Delta V_下 ΔV下,则总的迎角 α 下 = α + Δ α 下 \alpha_下=\alpha+\Delta\alpha_下 α下=α+Δα下,即迎角增大,右机翼升力增大;反之,左机翼上行运动,迎角减小,其对应的左机翼升力减小。左、右机翼的阻力也有同样情况。由于升力垂直于气流速度,故对于右机翼,因下增大,所以增大的升力将前倾,产生平行于 x x x轴的分力和平行于 z z z轴的分力;对于左机翼,则反之。平行于 z z z轴的两机翼分力的合力将产生负的气动滚转力矩 L A ( p ) < 0 L_A(p)<0 LA(p)<0,而平行于 x x x轴的两机翼分力的合力将产生负的气动偏航力矩 N A ( p ) < 0 N_A(p)<0 NA(p)<0,因此,对于机翼而言,交叉动导数 ( C n p ‾ ) W < 0 (C_n^{\overline{p}})_W<0 (Cnp)W<0为负值。
交叉动导数 C n p ‾ C_n^{\overline{p}} Cnp应为机翼和垂尾的交叉动导数之和,即 C n p ‾ = ( C n p ‾ ) v + ( C n p ‾ ) w C_n^{\overline{p}}=(C_n^{\overline{p}})_v+(C_n^{\overline{p}})_w Cnp=(Cnp)v+(Cnp)w
- 偏航角速度 r r r引起的气动偏航力矩 N A ( r ) N_A(r) NA(r)
由偏航角速度 p p p引起的气动偏航力矩 N A ( p ) N_A(p) NA(p)又称为航向阻尼力矩。此力矩主要由垂尾产生,表示式为:
N
A
(
r
)
=
C
n
r
‾
(
1
2
ρ
V
2
)
S
W
b
r
‾
N_A(r)=C_n^{\overline{r}}(\frac{1}{2}\rho V^2)S_Wb \overline{r}
NA(r)=Cnr(21ρV2)SWbr
式中,
C
n
r
‾
=
∂
C
n
∂
r
‾
C_n^{\overline{r}}=\frac{ \partial C_n }{ \partial \overline{r} }
Cnr=∂r∂Cn为航向阻尼导数,
r
‾
=
p
b
2
V
\overline{r}=\frac{pb}{2V}
r=2Vpb为量纲一的滚转角速度。
机翼分析:设飞行器右向偏航运动,偏航角速度 r > 0 r>0 r>0,左机翼前行,右机翼后行。当前行机翼的速度增大时,前行机翼的升力和阻力均增大;反之,当后行机翼的速度减小时,后行机翼的升力和阻力均减小。左、右机翼的阻力差形成一个阻止飞行器转动的负的气动偏航力矩 N A ( r ) < 0 N_A(r)<0 NA(r)<0,也称为阻力矩,所以对于机翼而言,航向阻尼导数 C n r ‾ < 0 C_n^{\overline{r}}<0 Cnr<0为负值。
垂尾分析:偏航角速度 r > 0 r>0 r>0时,垂尾将产生局部的负向侧滑角 β < 0 \beta<0 β<0,产生正的侧力 Y ( β ) > 0 Y(\beta)>0 Y(β)>0,因为垂尾位于飞行器的重心之后,故将产生负的气动偏航力矩 N A ( r ) < 0 N_A(r)<0 NA(r)<0,故对于垂尾而言,航向阻尼导数 C n r ‾ < 0 C_n^{\overline{r}}<0 Cnr<0为负值。
五、小结
气动力矩数学模型如下所示:
C
m
=
C
m
0
+
C
m
α
α
+
C
m
δ
e
δ
e
+
C
_
m
q
‾
q
‾
+
C
_
m
α
˙
‾
α
˙
‾
+
C
_
m
δ
e
˙
‾
δ
e
˙
‾
C
l
=
C
l
β
β
+
C
l
δ
a
δ
a
+
C
l
δ
r
δ
r
+
C
l
p
‾
p
‾
+
C
l
r
‾
r
‾
C
n
=
C
n
β
β
+
C
n
δ
a
δ
a
+
C
n
δ
r
δ
r
+
C
n
p
‾
p
‾
+
C
n
r
‾
r
‾
\begin{align*} C_m&=C_{m_0}+C_m^{\alpha}\alpha+C_m^{\delta_e}\delta_e+C\_m^{\overline{q}}\overline{q}+C\_m^{\overline{\dot{\alpha}}}\overline{\dot{\alpha}}+C\_m^{\overline{\dot{\delta_e}}}\overline{\dot{\delta_e}}\\ C_l&=C_l^{\beta}\beta+C_l^{\delta_a}\delta_a+C_l^{\delta_r}\delta_r+C_l^{\overline{p}}\overline{p}+C_l^{\overline{r}}\overline{r}\\ C_n&=C_n^{\beta}\beta+C_n^{\delta_a}\delta_a+C_n^{\delta_r}\delta_r+C_n^{\overline{p}}\overline{p}+C_n^{\overline{r}}\overline{r} \end{align*}
CmClCn=Cm0+Cmαα+Cmδeδe+C_mqq+C_mα˙α˙+C_mδe˙δe˙=Clββ+Clδaδa+Clδrδr+Clpp+Clrr=Cnββ+Cnδaδa+Cnδrδr+Cnpp+Cnrr
需要注意以下几点:
- 与气动力模型类似,本文写出的气动力矩模型均为线性模型(即变量在小范围内线性化),如果需要更高精度的气动力矩模型,可以使用多项式代替。
f
(
x
)
f(x)
f(x)为力矩系数组成项,若
x
x
x为静态量
(
α
,
β
,
δ
e
,
δ
r
)
(\alpha,\beta,\delta_e,\delta_r)
(α,β,δe,δr),则
C
x
k
C^{xk}
Cxk为力系数关于变量
x
x
x的
k
k
k阶静导数;若
x
x
x为动态量
(
p
‾
,
q
‾
,
r
‾
)
(\overline{p},\overline{q},\overline{r})
(p,q,r),则
C
x
k
C^{xk}
Cxk为力系数关于变量
x
x
x的
k
k
k阶动导数。
C l = f ( β ) + f ( δ e ) + f ( δ r ) + f ( p ‾ ) + f ( r ‾ ) C m = C m 0 + f ( α ) + f ( δ e ) + f ( q ‾ ) + f ( α ˙ ‾ ) + f ( δ e ˙ ‾ ) C n = f ( β ) + f ( δ e ) + f ( δ r ) + f ( p ‾ ) + f ( r ‾ ) f ( x ) = ∑ i = 1 k C x k x k , C x k = ∂ k C ∂ x k \begin{align*} C_l&=f(\beta)+f(\delta_e)+f(\delta_r)+f(\overline{p})+f(\overline{r})\\ C_m&=C_{m_0}+f(\alpha)+f(\delta_e)+f(\overline{q})+f(\overline{\dot{\alpha}})+f(\overline{\dot{\delta_e}})\\ C_n&=f(\beta)+f(\delta_e)+f(\delta_r)+f(\overline{p})+f(\overline{r})\\ f(x)&=\sum_{i=1}^{k} C^{xk} x^k,C^{xk}=\frac{ \partial^k C }{ \partial x^k } \end{align*} ClCmCnf(x)=f(β)+f(δe)+f(δr)+f(p)+f(r)=Cm0+f(α)+f(δe)+f(q)+f(α˙)+f(δe˙)=f(β)+f(δe)+f(δr)+f(p)+f(r)=i=1∑kCxkxk,Cxk=∂xk∂kC - 俯仰力矩中 C m α ˙ ‾ α ˙ ‾ , C m δ e ˙ ‾ δ e ˙ ‾ C_m^{\overline{\dot{\alpha}}}\overline{\dot{\alpha}},C_m^{\overline{\dot{\delta_e}}}\overline{\dot{\delta_e}} Cmα˙α˙,Cmδe˙δe˙为非定常项(系数随时间变化),滚转力矩和偏航力矩中没有考虑非定常项,即 β ˙ , δ e ˙ , δ r ˙ \dot{\beta},\dot{\delta_e},\dot{\delta_r} β˙,δe˙,δr˙的影响,一般情况下,这些非定常导数项很小,可以忽略不计。
本文介绍了气动力矩的数学模型,读者不需要完全背下来所有公式,而是去尝试理解这个建模方法,在不同的气动模型中,表达式会有些许差异,但是掌握基本形式,基本方法才是不变应万变。
下一期文章将带来运动学部分的讲解。感兴趣的朋友可以关注我们CSDN账号,技术沟通可查看评论区!
END
迅翼SwiftWing致力于固定翼技术共享,汇聚固定翼领域技术极客,推动固定翼技术持续创新!

















 404
404

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









