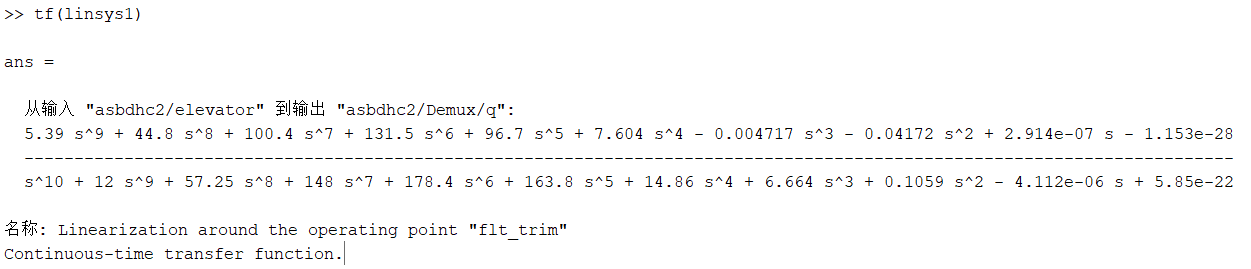
上一期视频我们完成了平飞状态下,从elevator到俯仰角速度q的线性化传递函数。本期文章我们接着这部分内容,为这个环节设计一个合理的控制率。 1、传递函数简化 接上期,我们获得了从elevator到俯仰角速度q的线性化传递函数。 我们来计算一下这个传递函数的零极点。 [Num,Den]= ss2tf(linsys1.A,linsys1.B,linsys1.c,linsys1


 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言












 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2055
2055





