







目录
NVIDIA Isaac Sim是一款参考应用,允许开发者在基于物理的虚拟环境中设计、模拟、测试和训练基于AI的机器人和自主机器。
基于NVIDIA Omniverse 构建的lsaac Sim 完全可拓展,支持开发者构建自己的自定义模拟器或将和兴lsaac Sim 技术集成到现有测试和验证管线中。
本人电脑配置也不行,所以临时租了台服务器,勉强能带的动这个仿真平台,具体配置如下:
1.CPU:Intel(R) Xeon Platinum 8369B 16核
3.显卡:Nvidia RTX4070(3080以上就可以用了)
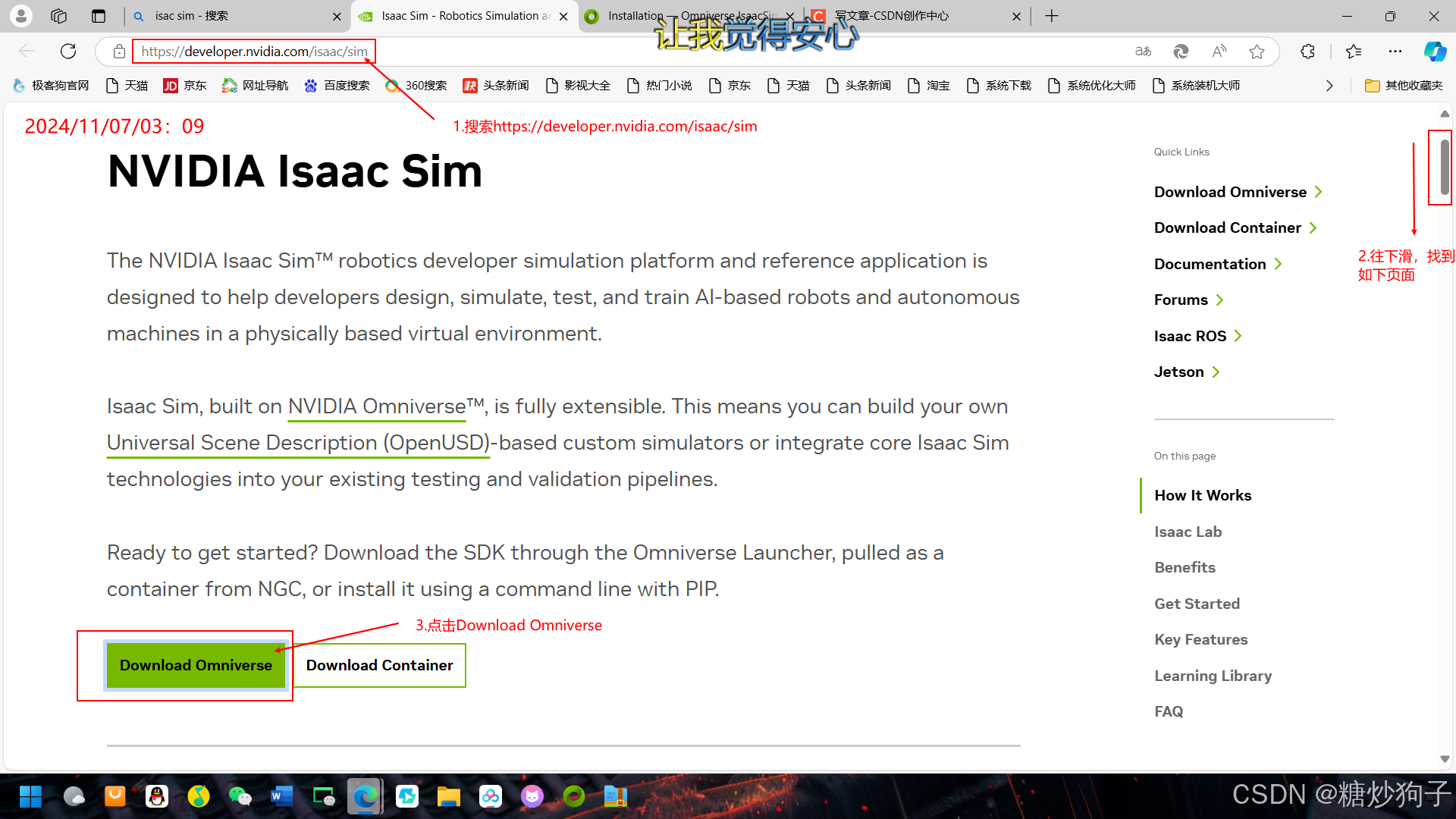
1.进入Nvidia Isaac Sim官网,下载Omniversehttps://developer.nvidia.com/isaac/sim
3.在主页找到Workstation Setup下的Direct Link:windwos/linux 选择自己对应的版本(这里我用的是windows版)
1.进入软件后,点击交易所,搜索Issac Sim ,往下滑找到ISAAC SIM应用,点击
3.点击首页的图书馆,左侧应用栏中找到lsaac sim并点击,点击启动
①跳转到应用上方菜单 找到Edit > Preferences 以打开面板。
②在面板左侧中浏览 Omniverse Kit中按类别分组的多种设置类型
①跳转到上方菜单单击Create > Physics > PhysicsScene
①跳转到上方菜单,单击Create > Physics >Ground Plane
①单击顶部菜单中的Create > Shapes > Cube创建立方体
④我么们需要定位特定位置的立方体模型,在右侧导航中找到Transform > translate 在属性床中,将长方体的属性固定为Transl(0,0,1),将缩放固定为Scale(1,2,0.5)。
⑤单击顶部菜单中的Create > Shapes > Cylinder创建一个圆柱体
②在 Property (属性) 选项卡中,单击按钮,然后选择 Physics > Rigid Body with Colliders Preset
②单击 Show By Type > Physics > Colliders > All。
①转到上方菜单,然后单击 Create > Physics > Physics Material
②在弹出框中选择 Rigid Body Material右侧将出现一个新内容PhysicsMaterial
②在 Property 选项卡中找到 Materials on Selected Model 菜单项。
① 高度逼真的物理模拟:Isaac Sim提供了高度逼真的物理引擎,可以模拟复杂的环境和机器人行为,这对于测试和验证机器人算法至关重要。
② 实时渲染:利用nVidia的图形处理能力,Isaac Sim能够提供实时渲染功能,使得虚拟环境中的视觉效果更加真实。
③ 多机器人模拟:Isaac Sim支持多机器人系统的模拟,这对于研究协作任务和群体行为非常有用。
④ 强化学习集成:平台内置了强化学习功能,使得研究人员可以轻松地训练机器人执行各种任务。
1. 高度逼真的物理模拟:Isaac Sim提供了高度逼真的物理引擎,可以模拟复杂的环境和机器人行为,这对于测试和验证机器人算法至关重要。
2. 实时渲染:利用nVidia的图形处理能力,Isaac Sim能够提供实时渲染功能,使得虚拟环境中的视觉效果更加真实。
3. 多机器人模拟:Isaac Sim支持多机器人系统的模拟,这对于研究协作任务和群体行为非常有用。
4. 强化学习集成:平台内置了强化学习功能,使得研究人员可以轻松地训练机器人执行各种任务。
5. 开放性和可扩展性:Isaac Sim提供了开放的API和插件系统,允许用户自定义模拟环境和机器人模型。
6. 与Omniverse集成:作为Omniverse的一部分,Isaac Sim可以与nVidia的其他工具和应用程序无缝集成,如用于自动驾驶的DRIVE Sim。
7. 云和本地部署:Isaac Sim可以在云端或本地服务器上运行,为用户提供了灵活的部署选项。
8. 教育资源:nVidia为Isaac Sim提供了丰富的教育资源和社区支持,帮助研究人员和学生学习和使用该平台。
1. 自动驾驶汽车:Isaac Sim可以用来模拟自动驾驶汽车的驾驶环境,进行算法训练和验证,确保在实际道路上的安全性和可靠性。
2. 工业自动化:在制造业中,Isaac Sim可以用于模拟工厂环境,训练机器人执行装配、搬运等任务,提高生产效率和质量。
3. 物流和仓储:通过模拟仓库环境,Isaac Sim可以帮助设计和优化自动化物流系统,如自动拣选和货物搬运。
4. 医疗机器人:在医疗领域,Isaac Sim可以用于模拟手术过程,训练机器人辅助手术,提高手术精度和成功率。
5. 农业机器人:Isaac Sim可以模拟农田环境,帮助开发自动化农业机器人,用于播种、收割和作物监测等任务。
6. 建筑和基础设施:在建筑行业,Isaac Sim可以用于模拟建筑工地,训练机器人执行建筑施工任务,如混凝土浇筑和墙体砌筑。
7. 教育和研究:Isaac Sim可以作为教学工具,帮助学生和研究人员学习和研究机器人技术、人工智能和机器学习等领域。
8. 娱乐和游戏:在娱乐行业,Isaac Sim可以用于开发虚拟现实(VR)和增强现实(AR)游戏,创造逼真的机器人角色和环境。
9. 灾害响应和救援:Isaac Sim可以模拟灾难场景,训练机器人执行搜救任务,提高应急响应能力。
10. 太空探索:Isaac Sim可以用于模拟太空环境,帮助设计和测试用于太空探索的机器人和自动化系统。
1. 提高计算效率:GPU拥有数千个处理核心,能够同时运行数千个线程,非常适合执行可以并行化的仿真任务。这使得复杂的工业仿真能够在更短的时间内完成。
2. 处理大规模数据:工业仿真往往涉及大量的数据和复杂的模型。GPU提供了更高的内存带宽和更大的内存容量,能够有效处理这些大规模数据集。
3. 实时渲染和可视化:在工业设计和开发过程中,实时渲染和可视化是非常重要的。GPU加速可以实现更快速、更流畅的渲染效果,帮助工程师更好地理解和评估设计方案。
4. 支持高级仿真技术:GPU加速还支持如有限元分析(FEA)、计算流体动力学(CFD)等高级仿真技术,这些技术在工业设计中扮演着关键角色。
5. 降低成本:通过使用GPU加速,企业可以在不增加硬件成本的情况下提高仿真性能,从而降低总体拥有成本。
6. 促进创新:GPU加速使得以前难以实现的复杂仿真成为可能,这有助于工程师探索新的设计理念和技术,推动工业创新。
在整体使用该软件,无论是从性能、处理逻辑、视觉体验来说都很不错,在此希望官方能够优化该软件对显卡的兼容性,在测试NVIDIA A10和T40显卡中,出现报错无法使用,希望能够整改
一、Isaac Sim简单介绍
NVIDIA Isaac Sim是一款参考应用,允许开发者在基于物理的虚拟环境中设计、模拟、测试和训练基于AI的机器人和自主机器。
基于NVIDIA Omniverse 构建的lsaac Sim 完全可拓展,支持开发者构建自己的自定义模拟器或将和兴lsaac Sim 技术集成到现有测试和验证管线中。
二、版本及相关配置
所使用的版本是isaac Sim 4.20版本
本人电脑配置也不行,所以临时租了台服务器,勉强能带的动这个仿真平台,具体配置如下:
1.CPU:Intel(R) Xeon Platinum 8369B 16核
2.内存:32GB
3.显卡:Nvidia RTX4070(3080以上就可以用了)
4.显存:12GB(最低要求是8GB)
5.操作系统:windwos 10
三、安装配置
一、安装Omniverse
1.进入Nvidia Isaac Sim官网,下载Omniversehttps://developer.nvidia.com/isaac/sim
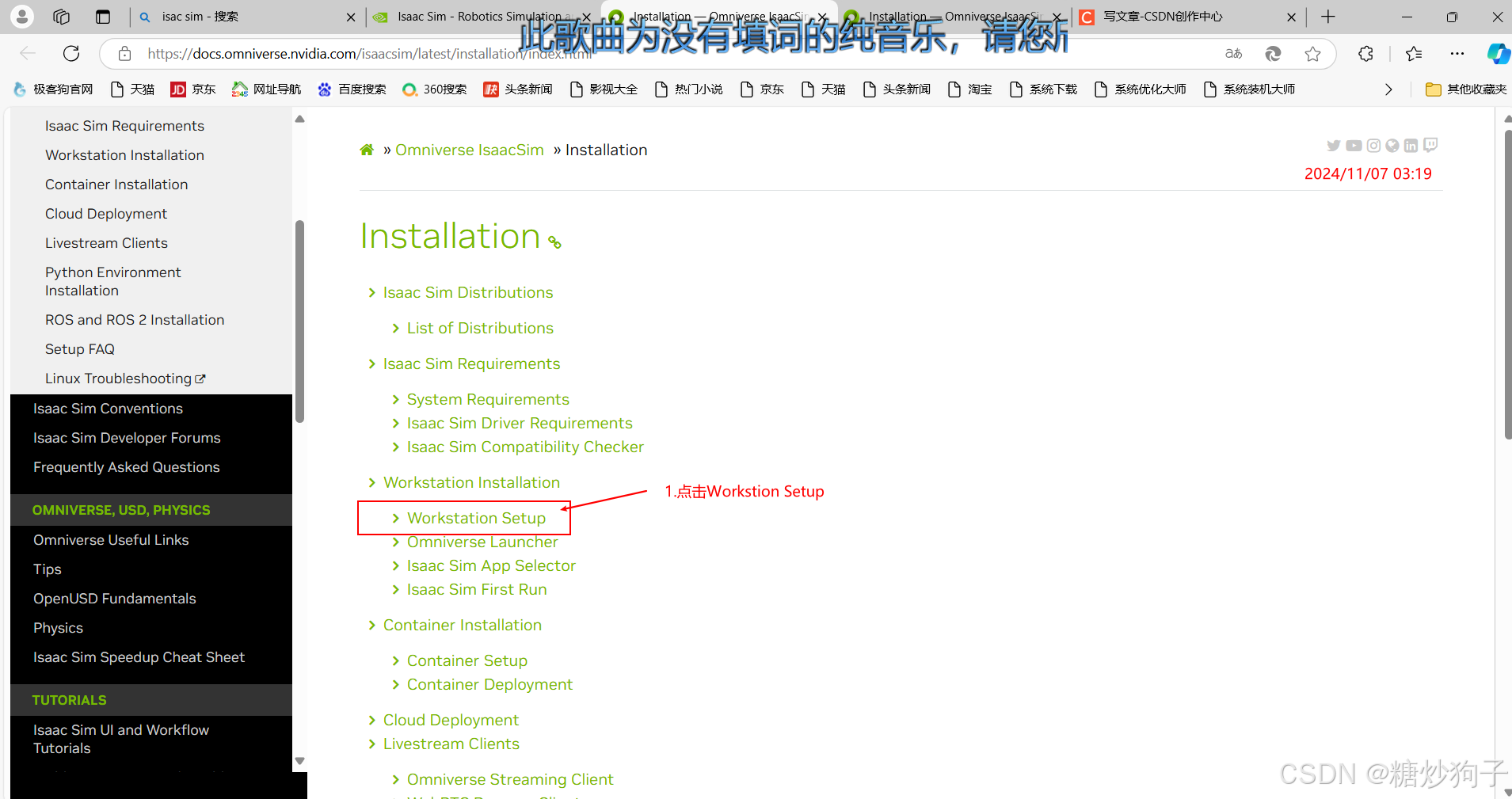
2.找到并点击Workstation Stetup
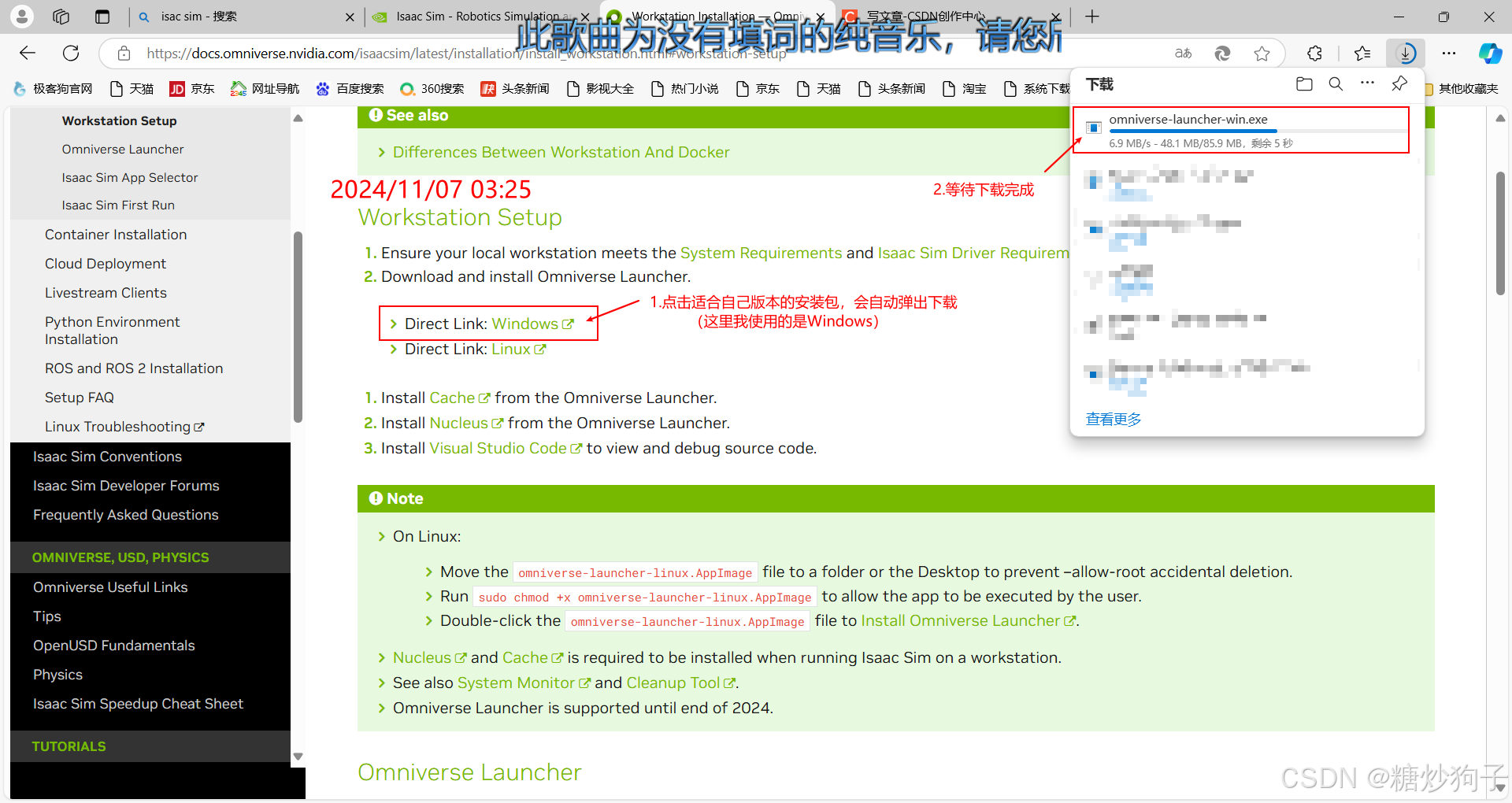
3.在主页找到Workstation Setup下的Direct Link:windwos/linux 选择自己对应的版本(这里我用的是windows版)
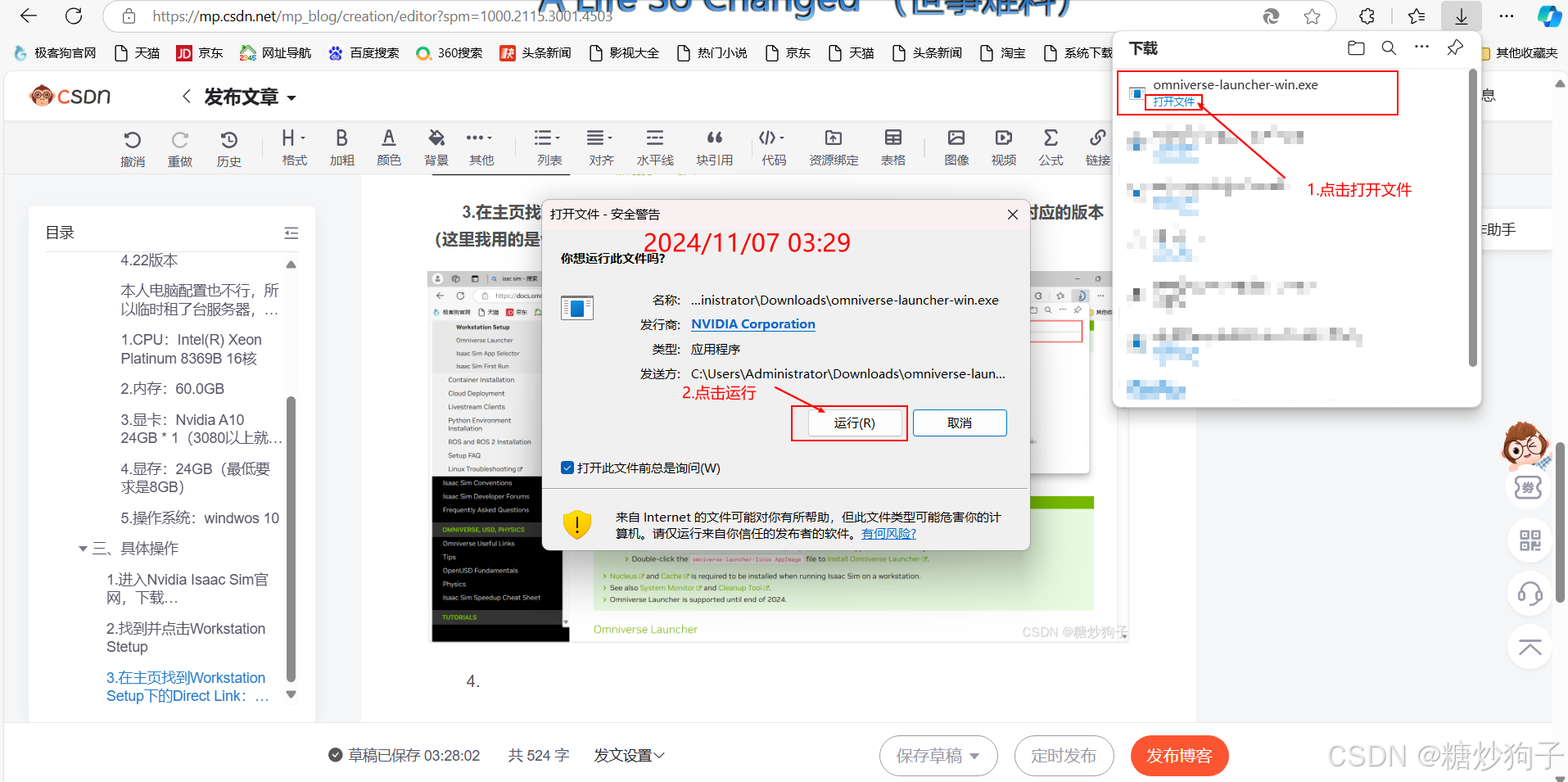
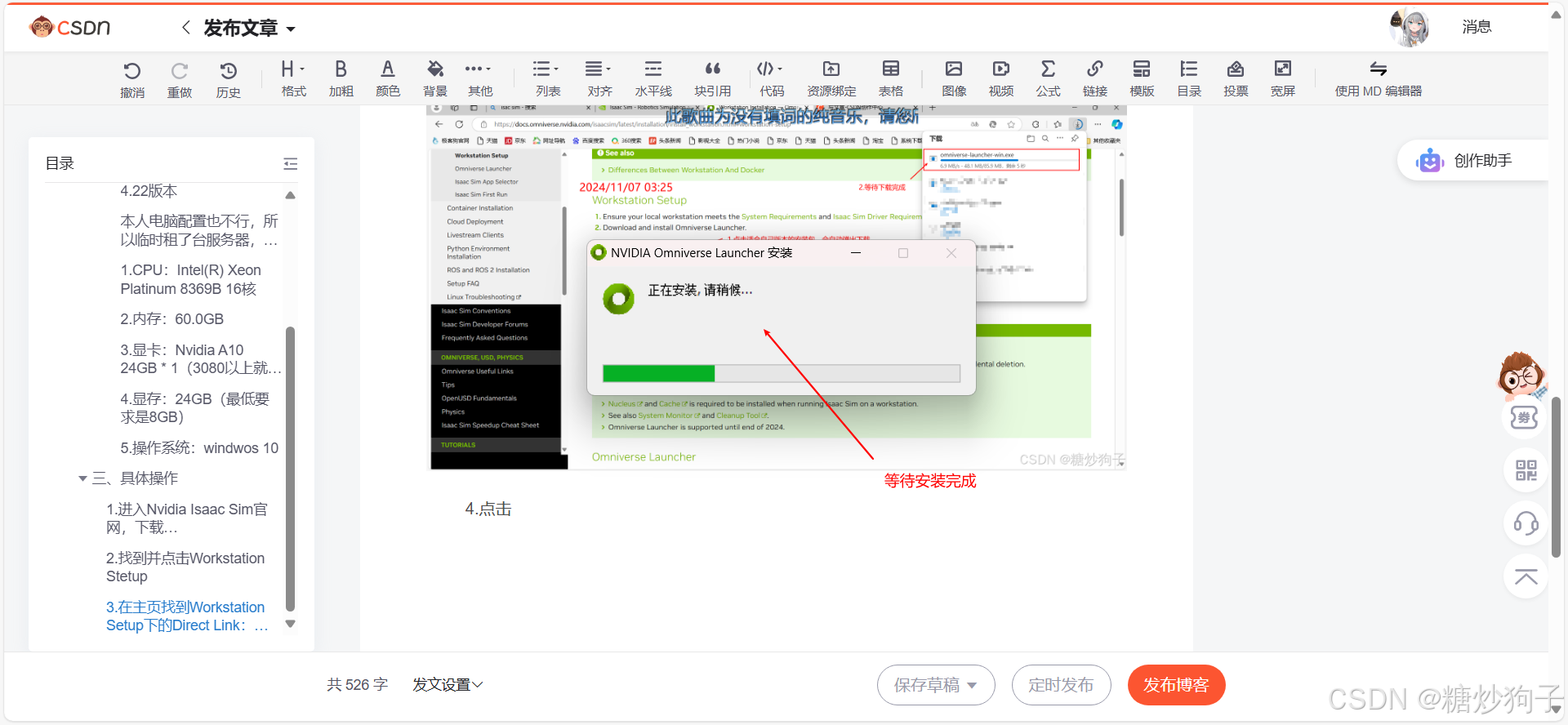
4.点击打开文件,并点击运行
5.等待安装完成
6.登入或者注册自己的Nvidia账号
二、安装Isaac Sim
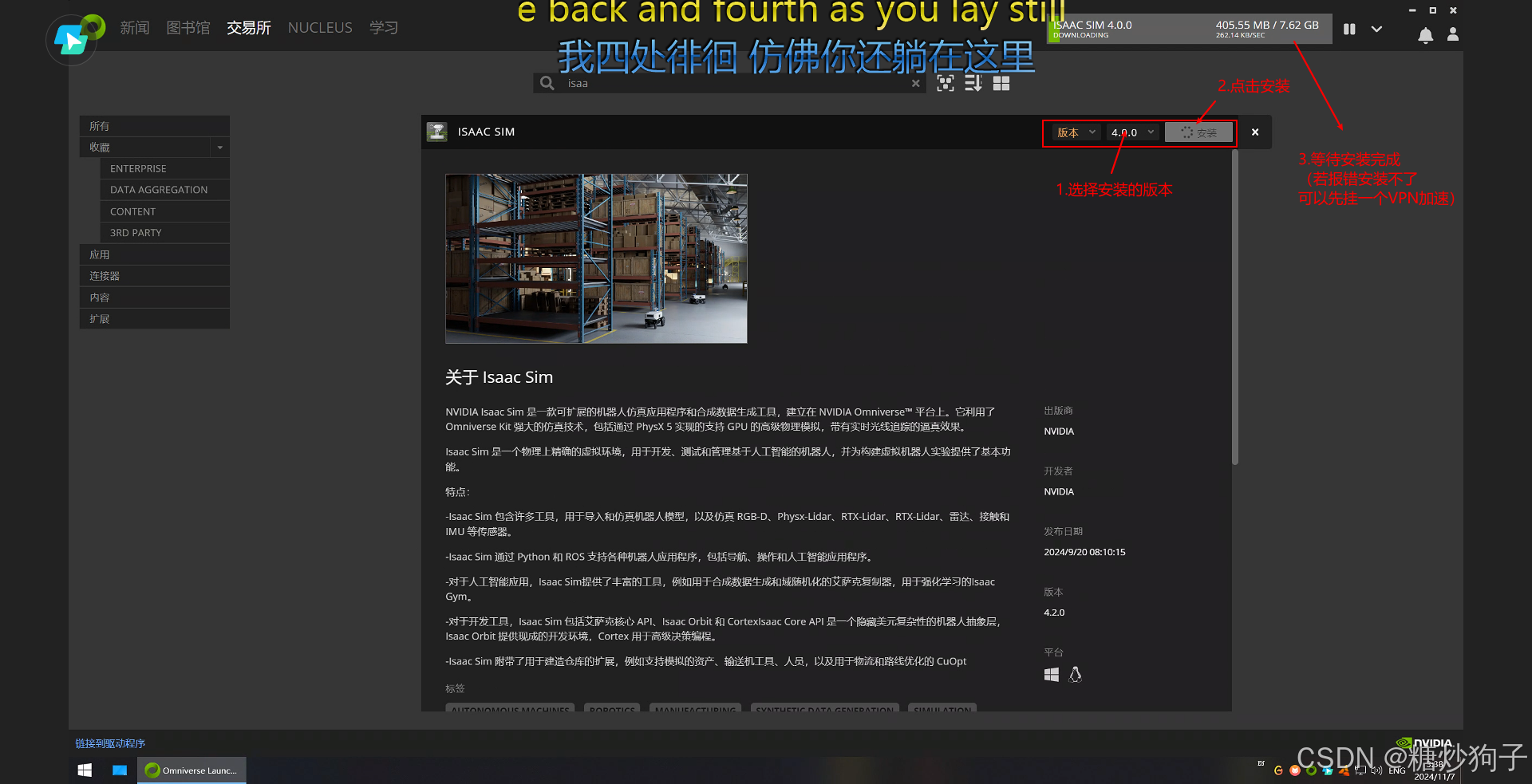
1.进入软件后,点击交易所,搜索Issac Sim ,往下滑找到ISAAC SIM应用,点击

2.选择要安装的版本,点击安装
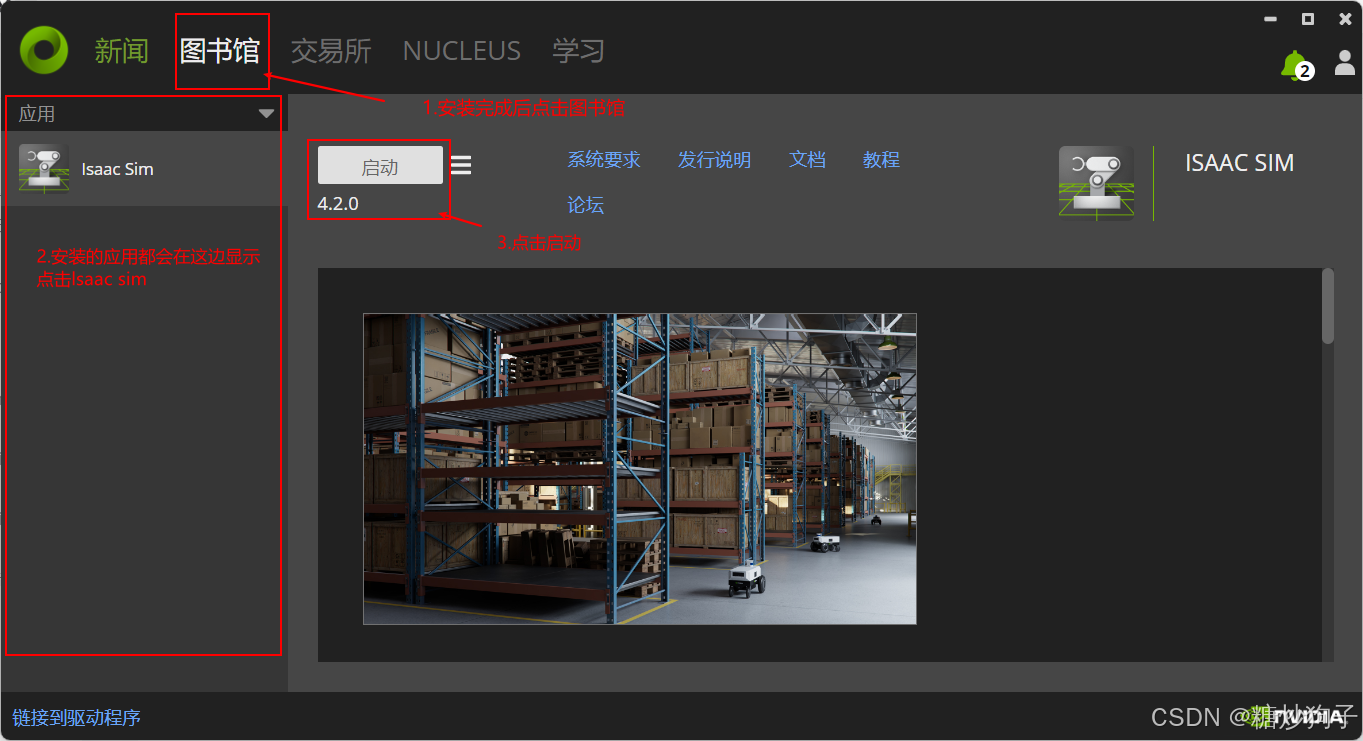
3.点击首页的图书馆,左侧应用栏中找到lsaac sim并点击,点击启动
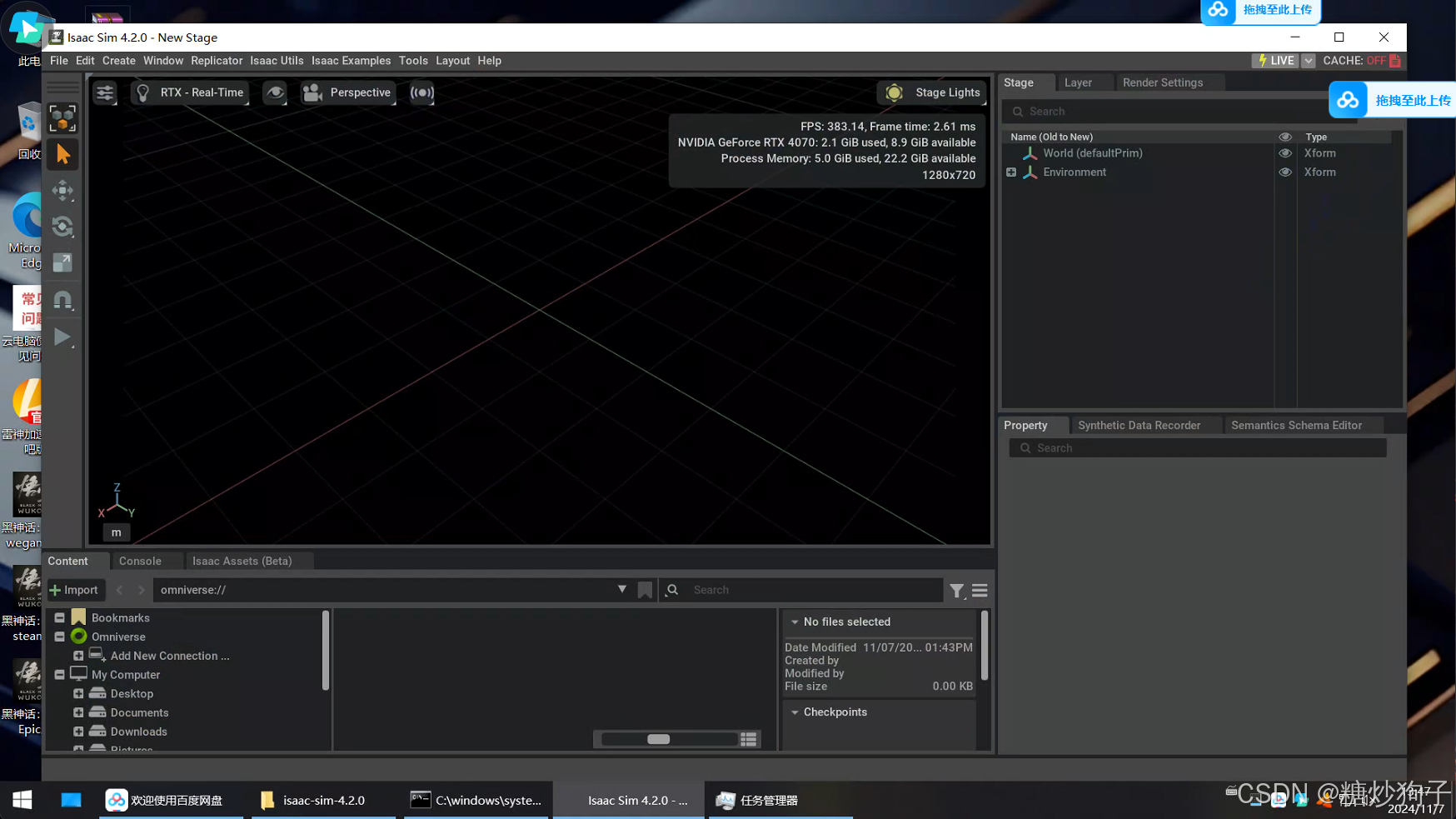
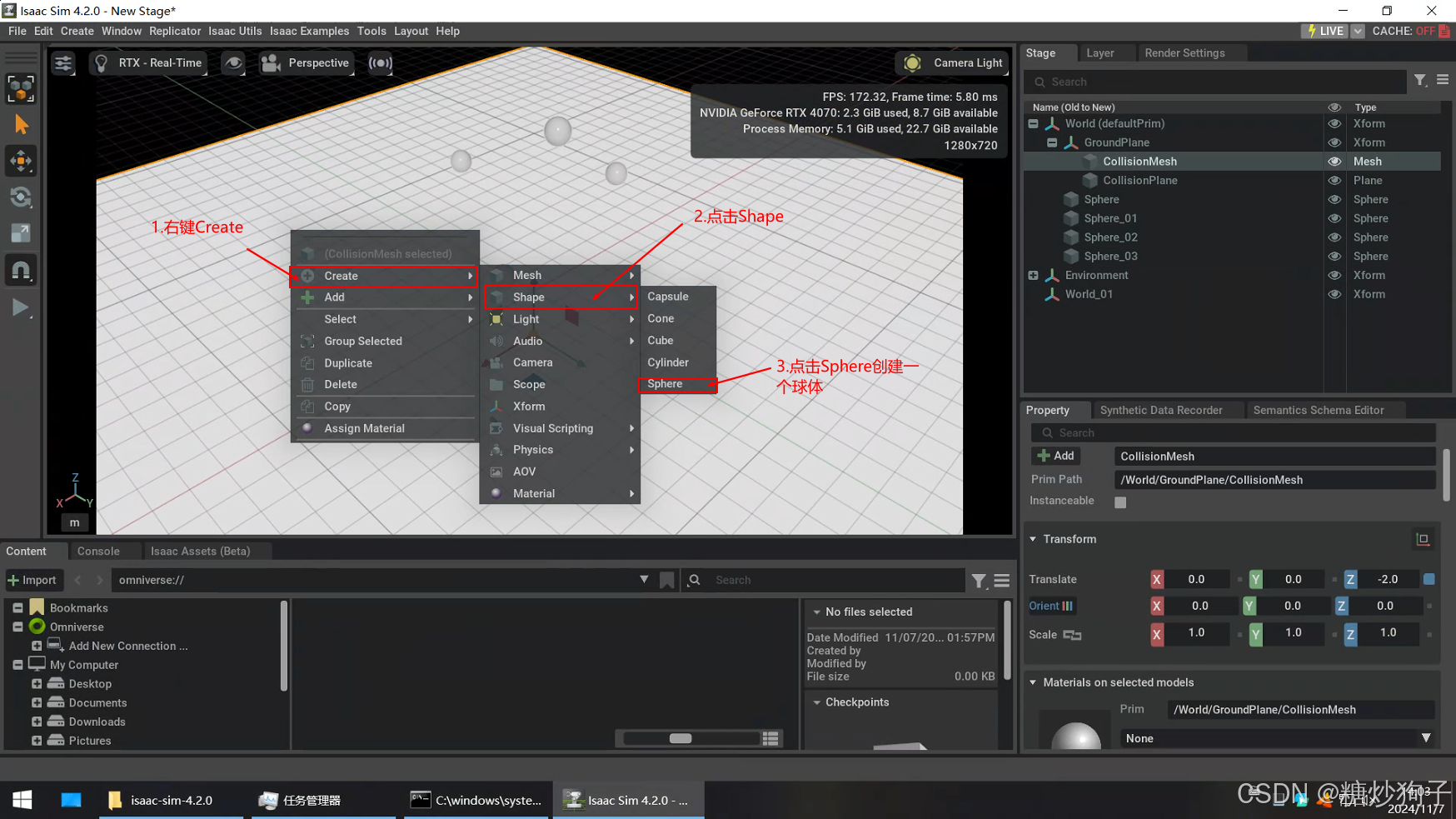
4.进入页面后是这样
5.可以简单的创建一个球体模型
四、运行过程记录
通过NVIDIA IsaacSim 软件,可以使用NVIDIA RTX GPU加速机器人仿真开发。
一、GPU加速仿真
通过创建一些简单的任务,测试物理模型的运行流畅度
1.设置阶段属性
①跳转到应用上方菜单 找到Edit > Preferences 以打开面板。
②在面板左侧中浏览 Omniverse Kit中按类别分组的多种设置类型
③左侧选择Stage并查看属性
2.创建物理场景
①跳转到上方菜单单击Create > Physics > PhysicsScene
②验证是否将PhysicsScene添加到右侧展示栏中
③单击这个物理场景查看属性
④禁用GPU 将GPU改为MBP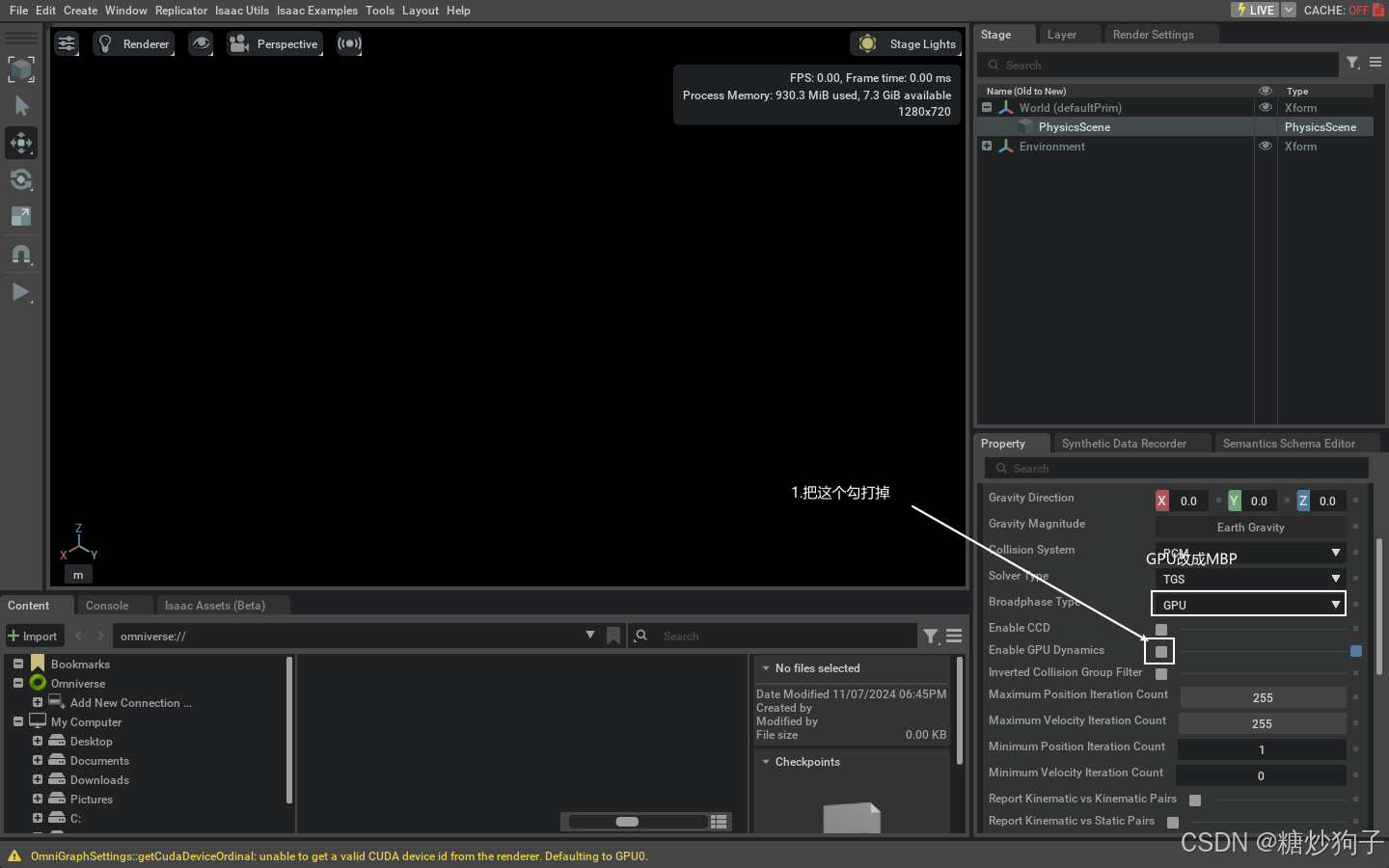
3.添加地平面
地平面可以有效防止任何物理特征的对象低于其地平面
①跳转到上方菜单,单击Create > Physics >Ground Plane
4.将对象添加到场景
①单击顶部菜单中的Create > Shapes > Cube创建立方体
②单击模型,拖动蓝色箭头,将立方体抬高到地平面以上
③点击“R”键,单击并拖动红色部分,缩放立方体
④我么们需要定位特定位置的立方体模型,在右侧导航中找到Transform > translate 在属性床中,将长方体的属性固定为Transl(0,0,1),将缩放固定为Scale(1,2,0.5)。
⑤单击顶部菜单中的Create > Shapes > Cylinder创建一个圆柱体
⑥X=1.5 Z=1.0 第二行Y轴为90度
5.添加物理特性
到目前为止,我们添加的立方体和圆柱体是严格的视觉图元,没有附加任何物理或碰撞属性。 当您通过按下并应用重力开始模拟时,这些对象不会移动,因为它们不受物理影响。 让我们将它们转换为具有碰撞属性的刚体,就像机器人应该有的那样
①按住Ctrl+Shift选择模型
②在 Property (属性) 选项卡中,单击按钮,然后选择 Physics > Rigid Body with Colliders Preset
③按下左侧并验证所有三个对象是否都落到地平面上
6.检查碰撞网格
①在视区顶部找到眼睛图标。
②单击 Show By Type > Physics > Colliders > All。
③验证应用了碰撞 API 的任何对象周围是否显示紫色轮廓。
7.添加接触和纹理参数
①转到上方菜单,然后单击 Create > Physics > Physics Material
②在弹出框中选择 Rigid Body Material右侧将出现一个新内容PhysicsMaterial
③在其属性选项卡中调整纹理系数
8.要将指定的物理材质应用于对象:
①在右侧中选择对象。
②在 Property 选项卡中找到 Materials on Selected Model 菜单项。
③在下拉菜单中选择所需的材质。
9.最终测试结果
二、NVIDIA isaac Sim体验
① 高度逼真的物理模拟:Isaac Sim提供了高度逼真的物理引擎,可以模拟复杂的环境和机器人行为,这对于测试和验证机器人算法至关重要。
② 实时渲染:利用nVidia的图形处理能力,Isaac Sim能够提供实时渲染功能,使得虚拟环境中的视觉效果更加真实。
③ 多机器人模拟:Isaac Sim支持多机器人系统的模拟,这对于研究协作任务和群体行为非常有用。
④ 强化学习集成:平台内置了强化学习功能,使得研究人员可以轻松地训练机器人执行各种任务。
⑤在测试小球坠落中,16个小球掉落,物理仿真非常流畅
五、相关分析
1.isaac Sim存在的优势
1. 高度逼真的物理模拟:Isaac Sim提供了高度逼真的物理引擎,可以模拟复杂的环境和机器人行为,这对于测试和验证机器人算法至关重要。
2. 实时渲染:利用nVidia的图形处理能力,Isaac Sim能够提供实时渲染功能,使得虚拟环境中的视觉效果更加真实。
3. 多机器人模拟:Isaac Sim支持多机器人系统的模拟,这对于研究协作任务和群体行为非常有用。
4. 强化学习集成:平台内置了强化学习功能,使得研究人员可以轻松地训练机器人执行各种任务。
5. 开放性和可扩展性:Isaac Sim提供了开放的API和插件系统,允许用户自定义模拟环境和机器人模型。
6. 与Omniverse集成:作为Omniverse的一部分,Isaac Sim可以与nVidia的其他工具和应用程序无缝集成,如用于自动驾驶的DRIVE Sim。
7. 云和本地部署:Isaac Sim可以在云端或本地服务器上运行,为用户提供了灵活的部署选项。
8. 教育资源:nVidia为Isaac Sim提供了丰富的教育资源和社区支持,帮助研究人员和学生学习和使用该平台。
2.潜在的应用场景
1. 自动驾驶汽车:Isaac Sim可以用来模拟自动驾驶汽车的驾驶环境,进行算法训练和验证,确保在实际道路上的安全性和可靠性。
2. 工业自动化:在制造业中,Isaac Sim可以用于模拟工厂环境,训练机器人执行装配、搬运等任务,提高生产效率和质量。
3. 物流和仓储:通过模拟仓库环境,Isaac Sim可以帮助设计和优化自动化物流系统,如自动拣选和货物搬运。
4. 医疗机器人:在医疗领域,Isaac Sim可以用于模拟手术过程,训练机器人辅助手术,提高手术精度和成功率。
5. 农业机器人:Isaac Sim可以模拟农田环境,帮助开发自动化农业机器人,用于播种、收割和作物监测等任务。
6. 建筑和基础设施:在建筑行业,Isaac Sim可以用于模拟建筑工地,训练机器人执行建筑施工任务,如混凝土浇筑和墙体砌筑。
7. 教育和研究:Isaac Sim可以作为教学工具,帮助学生和研究人员学习和研究机器人技术、人工智能和机器学习等领域。
8. 娱乐和游戏:在娱乐行业,Isaac Sim可以用于开发虚拟现实(VR)和增强现实(AR)游戏,创造逼真的机器人角色和环境。
9. 灾害响应和救援:Isaac Sim可以模拟灾难场景,训练机器人执行搜救任务,提高应急响应能力。
10. 太空探索:Isaac Sim可以用于模拟太空环境,帮助设计和测试用于太空探索的机器人和自动化系统。
3.GPU加速计算能力对工业仿真有什么意义
1. 提高计算效率:GPU拥有数千个处理核心,能够同时运行数千个线程,非常适合执行可以并行化的仿真任务。这使得复杂的工业仿真能够在更短的时间内完成。
2. 处理大规模数据:工业仿真往往涉及大量的数据和复杂的模型。GPU提供了更高的内存带宽和更大的内存容量,能够有效处理这些大规模数据集。
3. 实时渲染和可视化:在工业设计和开发过程中,实时渲染和可视化是非常重要的。GPU加速可以实现更快速、更流畅的渲染效果,帮助工程师更好地理解和评估设计方案。
4. 支持高级仿真技术:GPU加速还支持如有限元分析(FEA)、计算流体动力学(CFD)等高级仿真技术,这些技术在工业设计中扮演着关键角色。
5. 降低成本:通过使用GPU加速,企业可以在不增加硬件成本的情况下提高仿真性能,从而降低总体拥有成本。
6. 促进创新:GPU加速使得以前难以实现的复杂仿真成为可能,这有助于工程师探索新的设计理念和技术,推动工业创新。
4.运行体验和意见
在整体使用该软件,无论是从性能、处理逻辑、视觉体验来说都很不错,在此希望官方能够优化该软件对显卡的兼容性,在测试NVIDIA A10和T40显卡中,出现报错无法使用,希望能够整改。


















 4730
4730

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











