






1、PMSM同步旋转坐标系下的数学建模
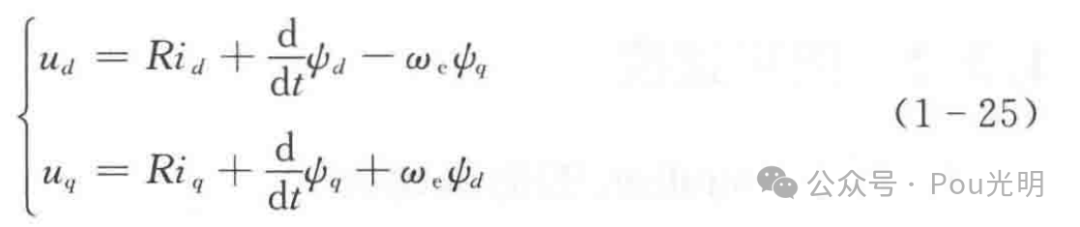
为了便于后期控制器的设计,通常选择同步旋转坐标系d-q下的数学模型,其定子电压方程可以表示为:
定子磁链方程为:

将(1-26)带入式(1-25),可得定子电压方程为:

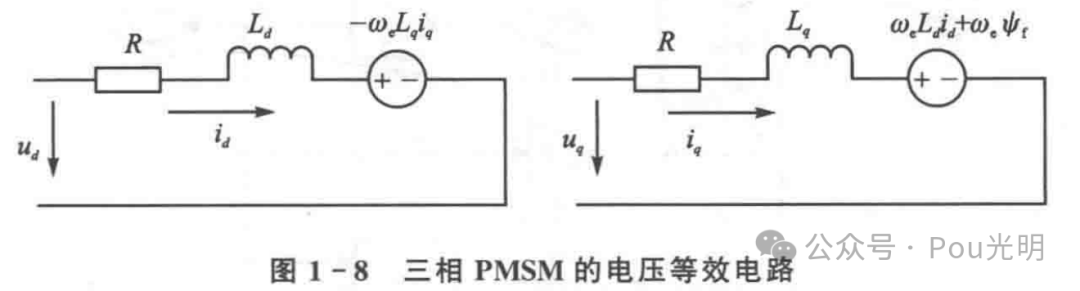
其中:ud、uq分别是定子电压的d-q轴分量;id、iq分别是定子电流的d-q轴分量;R是定子的电阻;φd、φq为定子磁链的d-q轴分量;ωe是电角速度;Ld、Lq分别是d-q轴电感分量;φf代表永磁体磁链。
电感乘以电流的结果是 磁链(磁通链)
电角速度ωe乘以磁链φd会产生一个重要的物理量,即 电感电压 或称为 反电动势。
根据式(1-27)可以得出如图1-8所示的电压等效电路。从图1-8中可以看出,三相PMSM的数学模型实现了完全的解耦。
此时电磁转矩方程可写为:

式(1-25)~式(1-28)是针对内置式三相PMSM建立的数学模型;对于表贴式三相PMSM,定子电感满足Ld=Lq=Ls。因此,表贴式三相PMSM的数学模型相对简单一些。
另外,在仿真建模时也要注意以下几个重要的关系式:
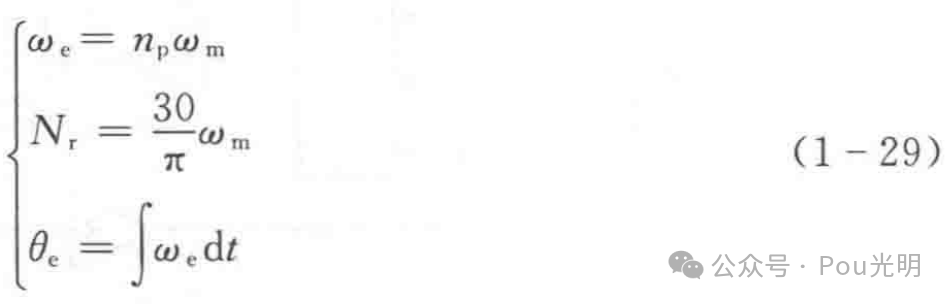
其中:ωm为电机的机械角速度,rad/s;Nr为电机的转速,r/min。【1】
2、PMSM矢量控制原理
矢量控制的基本思想是将交流电动机等效为他励直流电动机,转矩和励磁分别做独立的控制。
定子电流被分解成:
直轴电流Id:励磁电流
交轴电流Iq:转矩电流
3、电流环的传递函数图
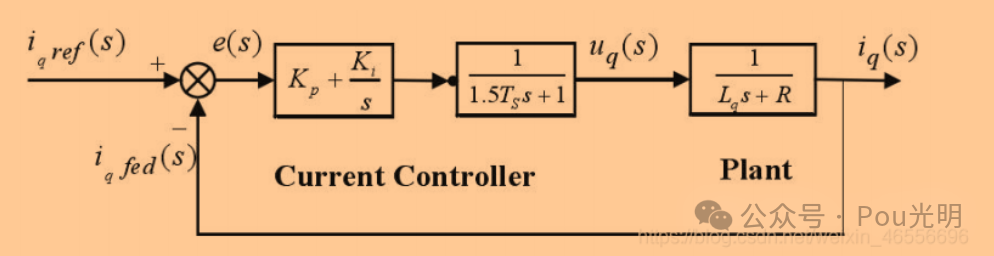
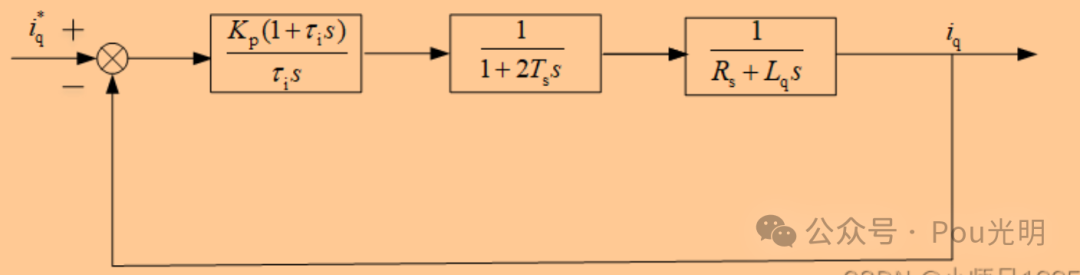
下面两张图是在网上找到的基本一致的结构框图,以此为例进行学习。
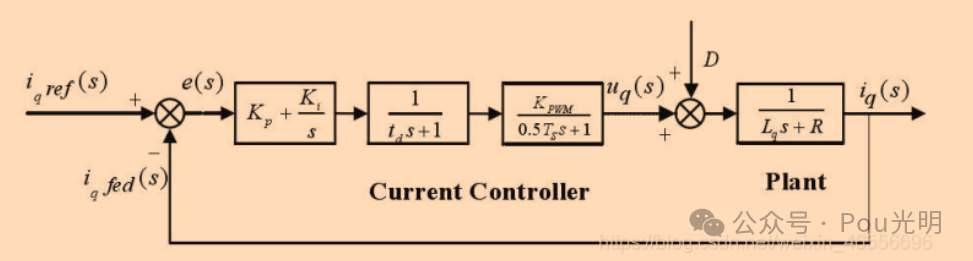
图3-1
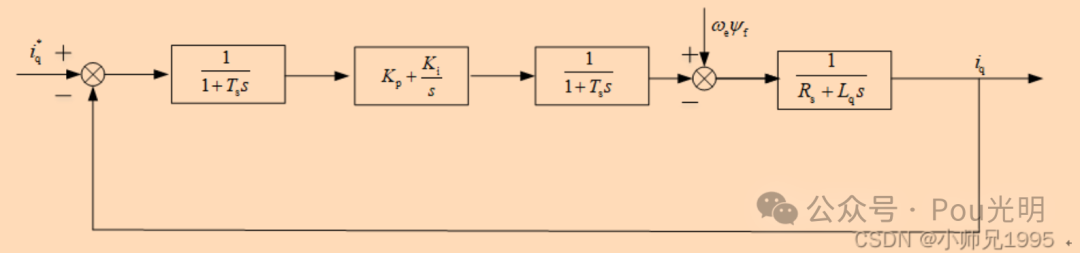
图3-2

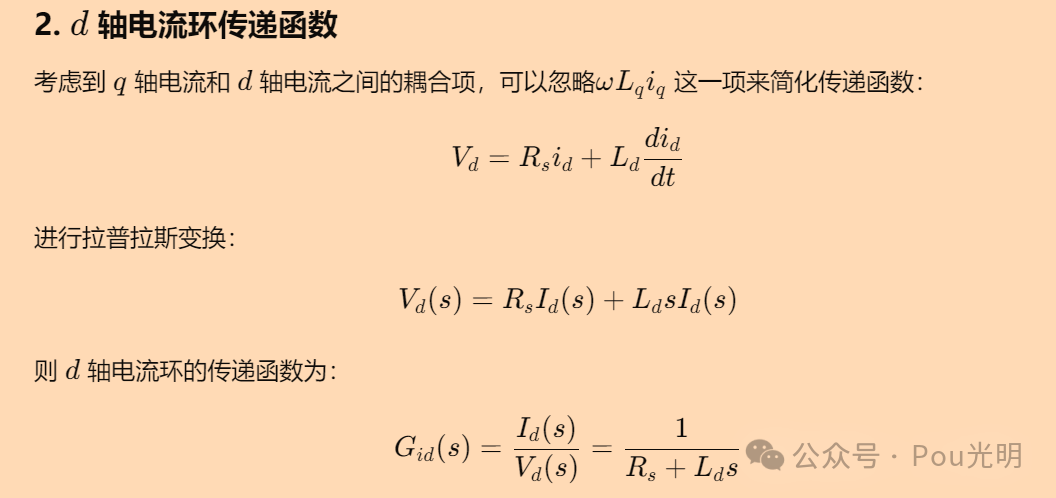
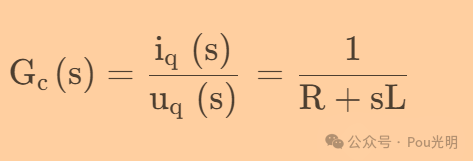
①拉式变换后,得到PMSM的解耦模型为:
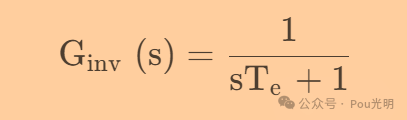
②SVPWM的控制逆变器等效为一阶惯性环节
③PI控制器:
④延迟环节
框图分析:
对于3-1,传递函数包括四个部分:PI、CPU部分、逆变器部分和电机部分。其中CPU部分是延迟环节,td=Ts。逆变器部分是小惯性环节,KPWM是逆变器的增益,在这里取1,Ts=1/fs,fs为逆变器的开关频率,设置为10KHz。在这里惯性环节和延迟环节可以合成简化:

那么将上图电流环传递函数可以简化为:
对于图3-2:
①由于转速的变化相对于电流的变化非常缓慢,在电流的瞬态变化过程中,转速基本保持不变,为了便于分析,电流环可忽略扰动的影响
②由于Ts采样电流周期非常小,所以带有Ts的惯性环节可以采用高频段小惯性环节近似处理,将两个小惯性环节用一个惯性环节等效替代,该惯性环节的时间常数为T=Ts + Ts = 2Ts。
电流环的结构框图简化为:
欢迎关注:
参考:
https://bbs.elecfans.com/jishu_2173913_1_1.html
https://blog.csdn.net/weixin_42650162/article/details/128365234
https://blog.csdn.net/qq_38190041/article/details/111084439















 2618
2618

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









