







 本文概述了SLAM在机器人和计算机视觉领域的应用,强调了视觉SLAM的基本原理和不同类型的SLAM系统,包括基于滤波器的MonoSLAM、MSCKF,基于关键帧BA的PTAM和ORB-SLAM,以及直接跟踪法。文中详细分析了各类方法的优缺点,并指出它们在特征匹配、鲁棒性和实时性方面的表现。
本文概述了SLAM在机器人和计算机视觉领域的应用,强调了视觉SLAM的基本原理和不同类型的SLAM系统,包括基于滤波器的MonoSLAM、MSCKF,基于关键帧BA的PTAM和ORB-SLAM,以及直接跟踪法。文中详细分析了各类方法的优缺点,并指出它们在特征匹配、鲁棒性和实时性方面的表现。
一、大体总结
首先从AR(Augmented reality 增强现实)切入,讲了SLAM的重要性以及视觉SLAM可以带来的好处,然后以此展开总体的概括了SLAM的发展情况,也分析和介绍了各不同SLAM的性能区别,对各个特性进行了对比和分析,最后总体讲了现有SLAM技术的不足以及对SLAM日后发展的憧憬。
二、知识获取
1.同时定位与地图构建(simultaneous localization and mapping,SLAM)最早源于机器人领域[1-4], 其目标是在一个未知的环境中实时重建环境的三维结构并同时对机器人自身进行定位. 在计算机视觉
领域, 与之类似的技术是运动推断结构(structurefrom-motion, SFM)[5]. 早期的SFM 技术一般是离线处理的, 后来随着技术的发展出现了实时的
SFM 技术。
2.视觉SLAM的基本原理(重点啊,自己 这里基本看不懂,慢慢来吧)
其基本原理为多视图几何原理
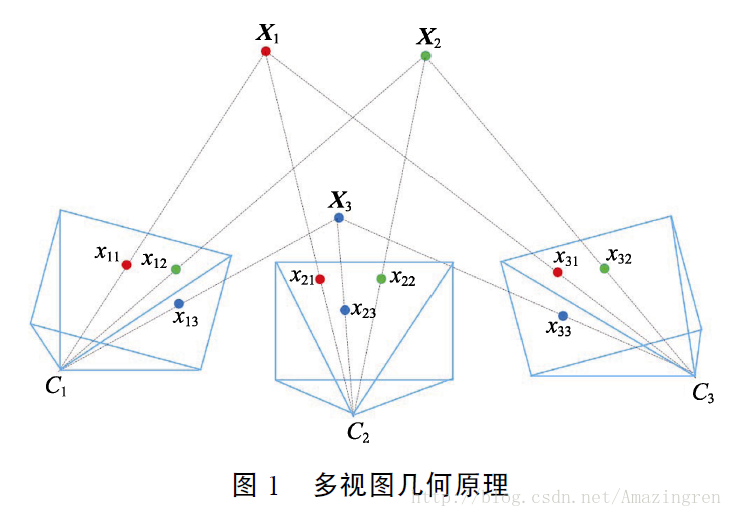
V-SLAM 的目标为同时恢复出每帧图像对应的相机运动参数 C1…Cm , 及场景三维结构X1…Xn . 每个相机运动参数 Ci 包含了相机的位置和朝向信息, 通常表达为一个3×3 的旋转矩阵Ri 和一个三维位置变量 pi . Ri , pi将一个世界坐标系下的三维点 X j 变
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 790
790

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









