







1 apt安装
我的电脑是ubuntu18.04+ros-melodic,安装步骤如下,其他版本类似安装
安装plotjuggler
sudo apt-get install ros-melodic-plotjuggler安装ros插件(不安装的话应该打不开.bag文件)
sudo apt-get install ros-melodic-plotjuggler-msgs ros-melodic-plotjuggler-ros2 打开.bag文件示例
roscore另起一个终端:
rosrun plotjuggler plotjuggler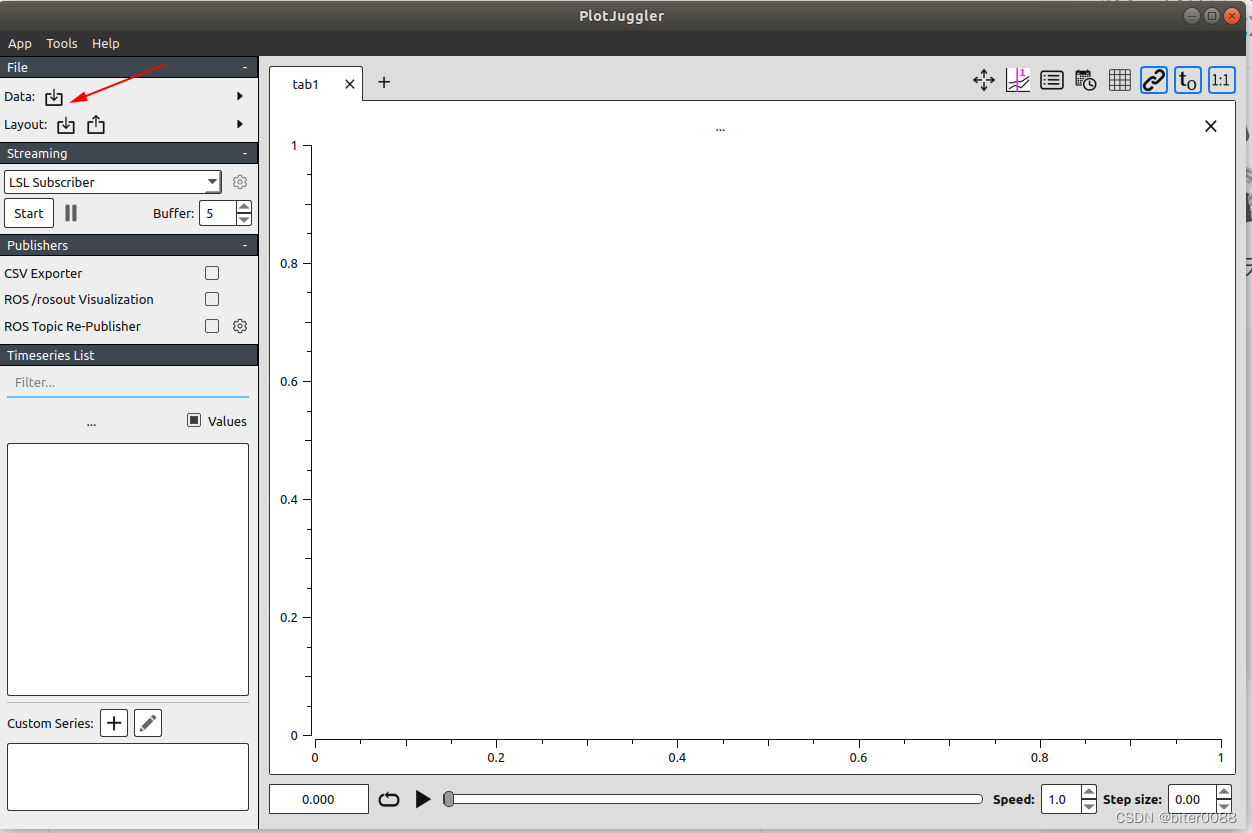
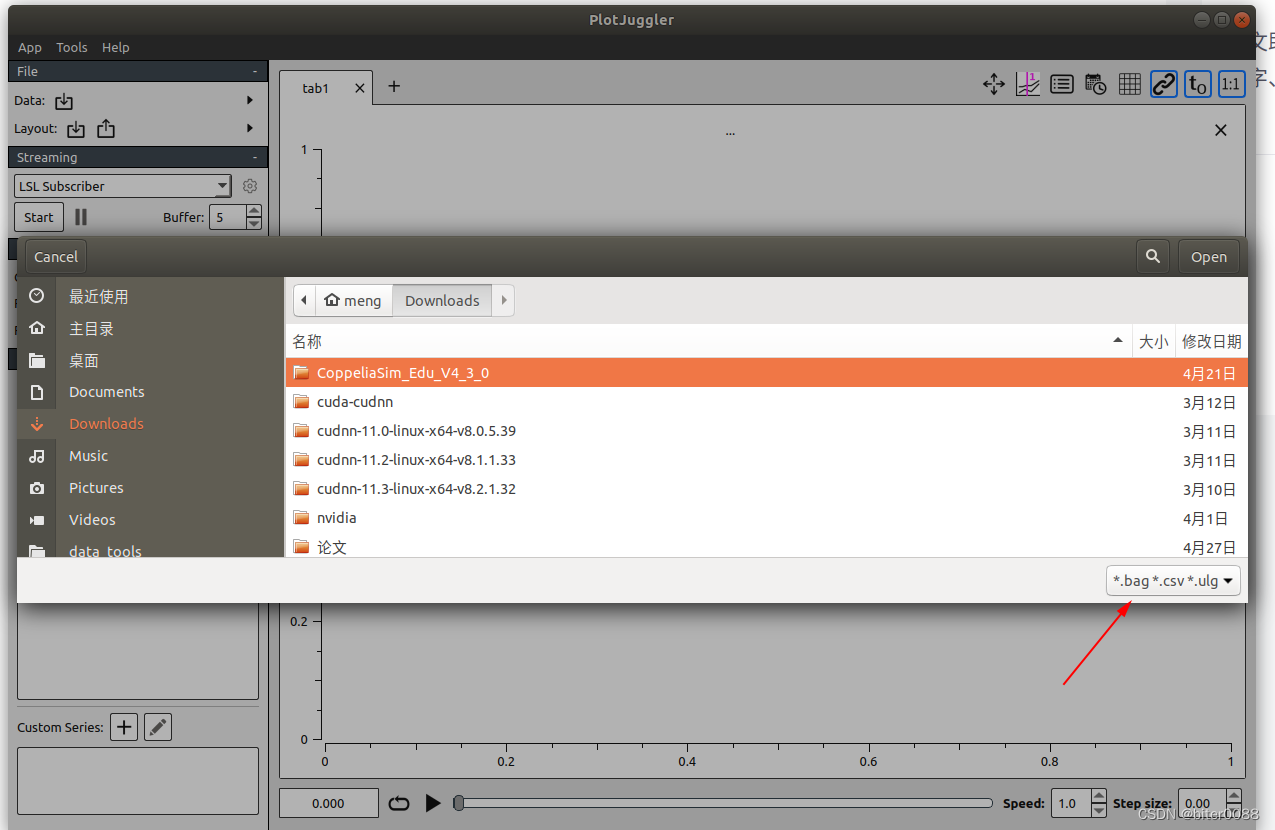
如上图,点击箭头处,选择文件,可以看出,支持.bag文件了
注:
示意数据和简单绘图还行,复杂绘图就不行了
参考链接:
源码安装:https://blog.csdn.net/whuzhang16/article/details/118355489
源码安装缺少rosbag插件:https://blog.csdn.net/qq_40079681/article/details/123862851
@meng















 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









