







 本文介绍了ROS中的两种绘图工具:rqt_plot用于实时查看topic数据,虽功能单一但操作简便;PlotJuggler提供了更丰富的功能和界面,但需额外安装。
本文介绍了ROS中的两种绘图工具:rqt_plot用于实时查看topic数据,虽功能单一但操作简便;PlotJuggler提供了更丰富的功能和界面,但需额外安装。
前言:
这里介绍两种rosbag包的绘图工具,一种是ros自带的GUI可视化工具rqt_plot,另外一种是开源工具PlotJuggler。
一:rqt_plot
参考文章:rqt_plot工具——ROS中查看变量时间趋势线-CSDN博客
ROS GUI开发工具(rqt)
rosrun rqt_plot rqt_plot //画出发布在topic上的数据变化图
rosrun rqt_graph rqt_graph //画出node关系图
rosrun rqt_console rqt_console //属于ROS日志框架(logging framework)的一部分,用来显示节点的输出信息
rosrun rqt_reconfigure rqt_reconfigure //参数动态配置工具
rosrun rqt_tf_tree rqt_tf_tree //tf树
rqt_plot可以直接查看topic的数据曲线,非常方便。
1.rqt_plot的启动方式:
roscore
rosrun rqt_plot rqt_plot
下面展示如何在rqt_plot实时显示imu数据。
首先播放录制好的rosbag包
rosbag play <包名>2.查看主机接受到的toptic:
rostoptic list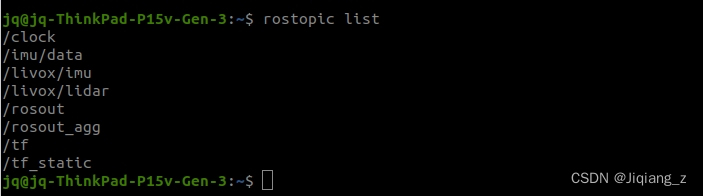
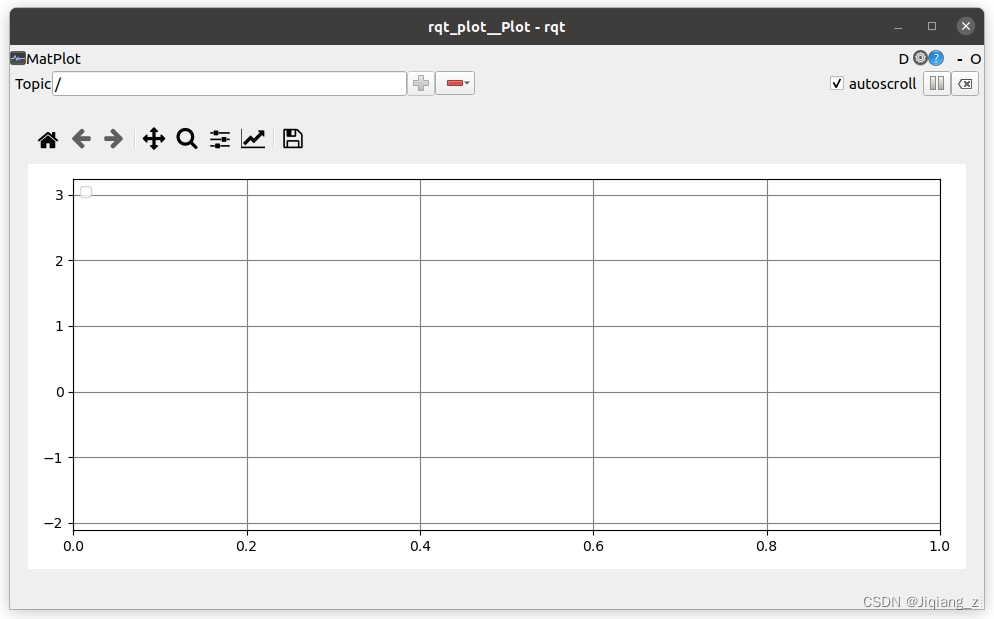
可以看到我们主机端口接受到的toptic话题有/imu/data,下面我们将此话题信息在qrt_plot中显示。打开qrt_plot后的界面如下,我们只需要在Toptic一栏输入我们想要监测的话题变量即可。
3.查看话题的消息类型和消息类型的信息。
查看话题的消息类型:
rostopic type /imu/data
![]()
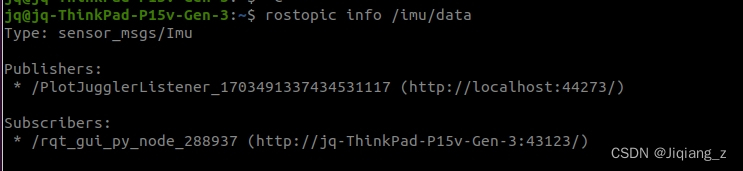
或者使用rostopic info指令查看:
rostopic info /imu/data
 查看消息类型信息:
查看消息类型信息:
rosmsg info sensor_msgs/Imu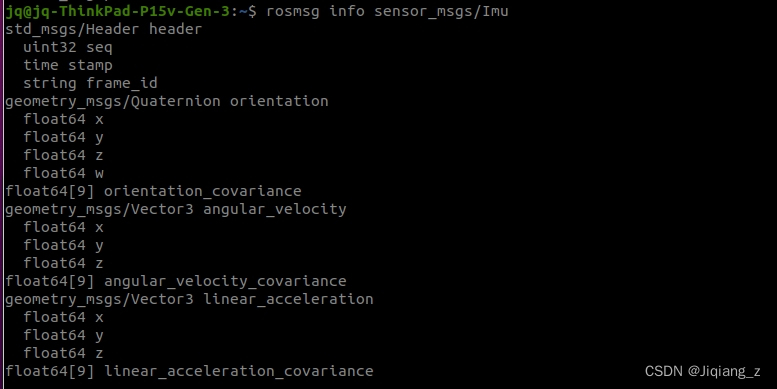
可以看到此IMU发布话题的消息内容有哪些,像是imu的角速度信息angular_velocity和imu的线加速度信息angular_velocity都可以看到。
4.下面展示在rqt_plot中显示angular_velocity信息和angular_velocity信息。
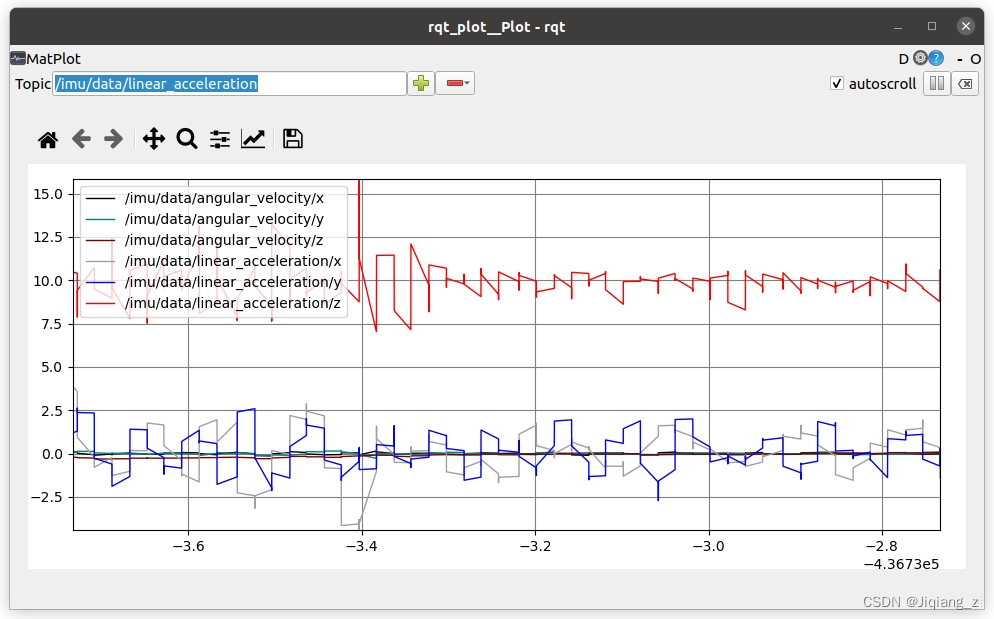
注意输入Topic时中间都用/符号隔开。输入/imu/data/linear_acceleration,就会自动把所以变量xyz自动加入:
/imu/data/linear_acceleration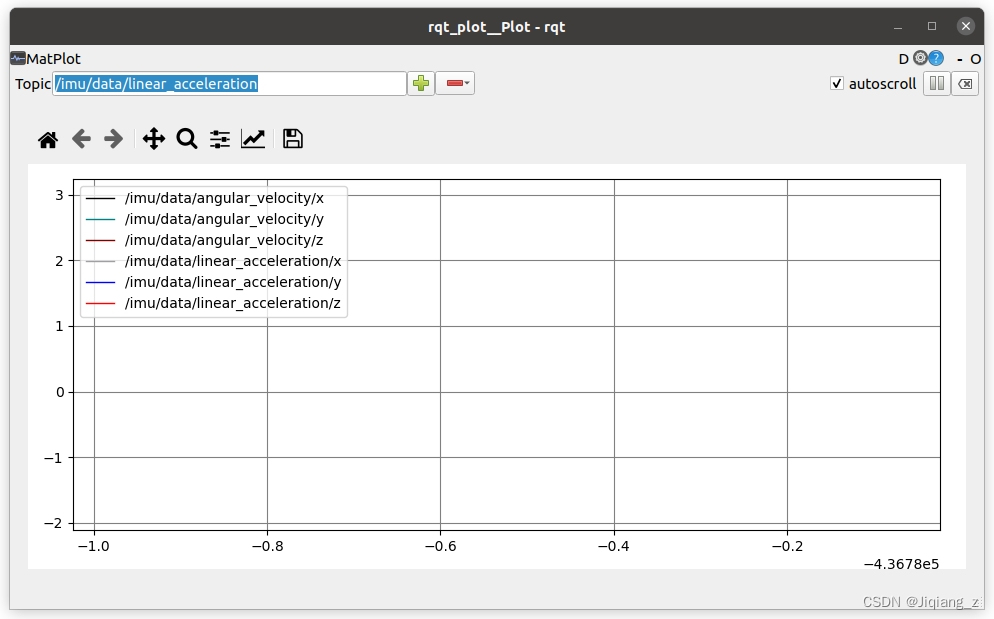
下面开始播放rosbag包后,rqt_plot中就可以正常显示了。
缺陷:不能保存配置文件,功能比较单一,使用体验不如PlotJuggler。
二:PlotJuggler
参考文章:【ROS学习】- PlotJuggler绘图工具的安装使用-CSDN博客
安装PlotJuggler:
sudo apt-get install ros-melodic-plotjuggler安装ros插件(不安装的话应该打不开.bag文件)
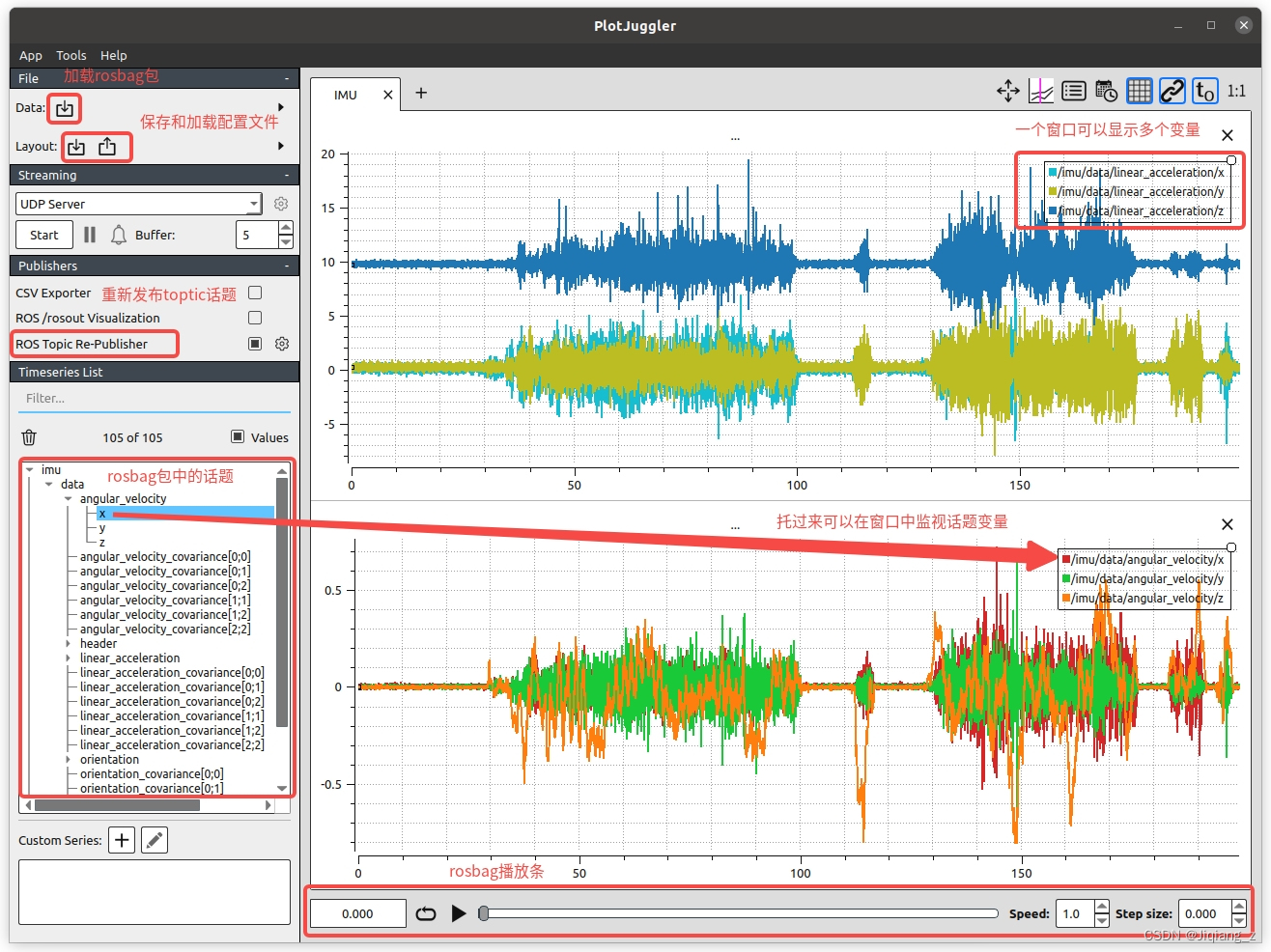
sudo apt-get install ros-melodic-plotjuggler-msgs ros-melodic-plotjuggler-ros启动plotjuggler:
rosrun plotjuggler plotjuggler界面和功能如下:



















 745
745

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











