






前面介绍了一阶动态系统和极点的概念,现在来看看二阶系统。
首先我们还是举个二阶动态系统的例子。比如说运动。
根据牛顿定理,物体运动的外力F = ma, 而加速度实际上是物体位置的二阶导,因此物体运动实际上是一个二阶微分方程,也就是二阶动态系统。
再举一个详细点的例子,弹簧。当你把弹簧拉直后松开,弹簧是不是回缩回去,然后弹回来,循环往复直至平息?
这个弹簧的运动轨迹看起来像不像一个一维空间上的三角函数?那么究竟是不是呢,我们可以用弹簧为例来进行数学建模和分析。
首先,我们根据物理定理进行受力分析,并列出我们的微分方程:
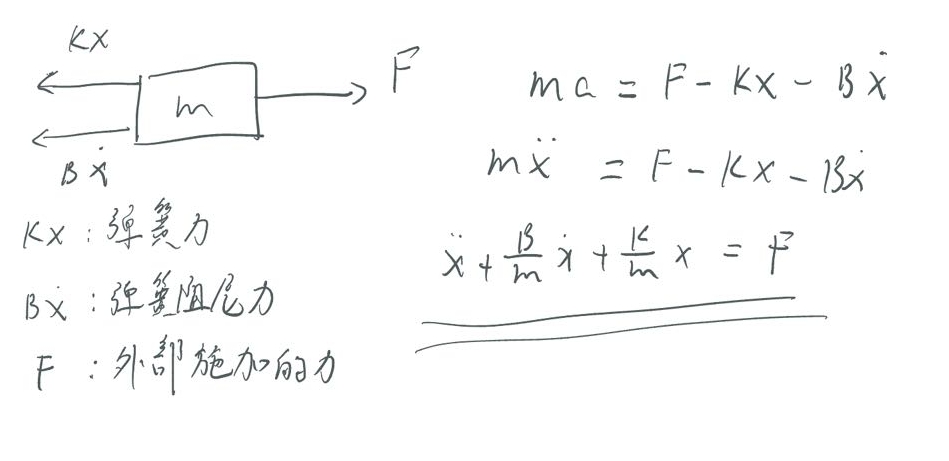 这个时候,我们进行一个非常重要的定义:
这个时候,我们进行一个非常重要的定义:
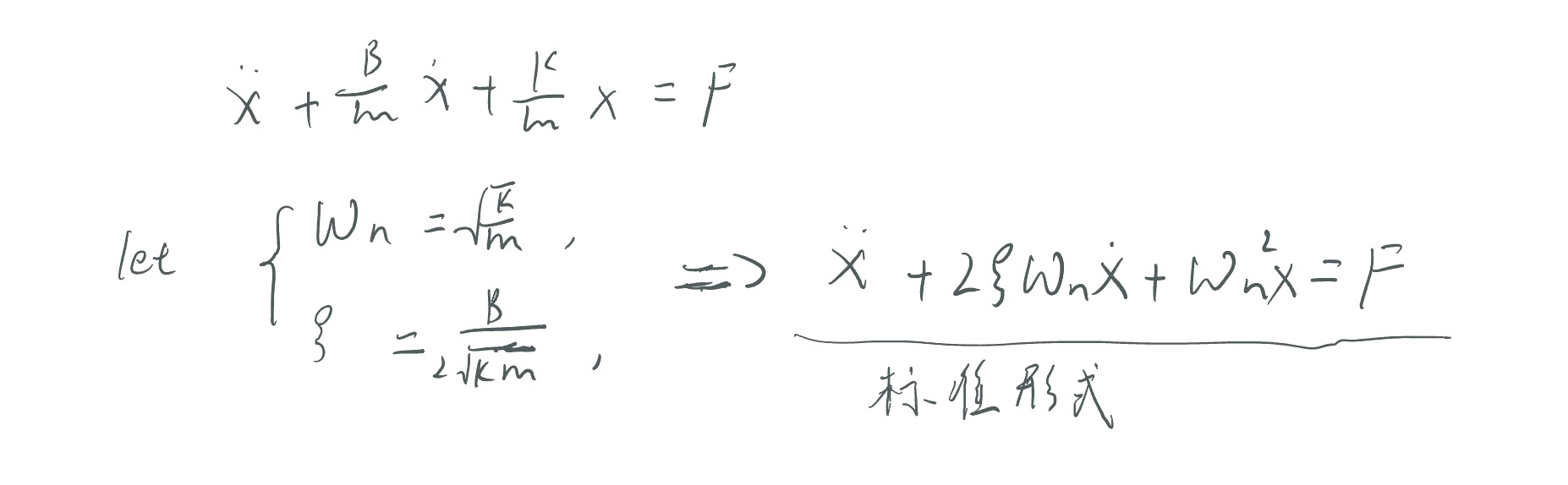
为什么要这样定义呢?原因很简单,变换后这样的形式被称为二阶系统的标准形式,其中参数ζ和Wn直接决定了系统的响应和性能,在后续的数学推导中我们可以轻易看出这一点。
其中ζ被称为阻尼比(damping ratio),Wn被称为固有频率(natural frequency)。
下面来求解标准形式二阶微分方程,先令F=0,即没有外部输入的情况。
二阶微分方程的解为:
x(t) = e^(λt)
x’(t) = e^(λt)
x’'(t) = e^(λt)
怎么解出来的我们先略过,放在后面来证明,我们先关注系统本身。
把解带入方程:
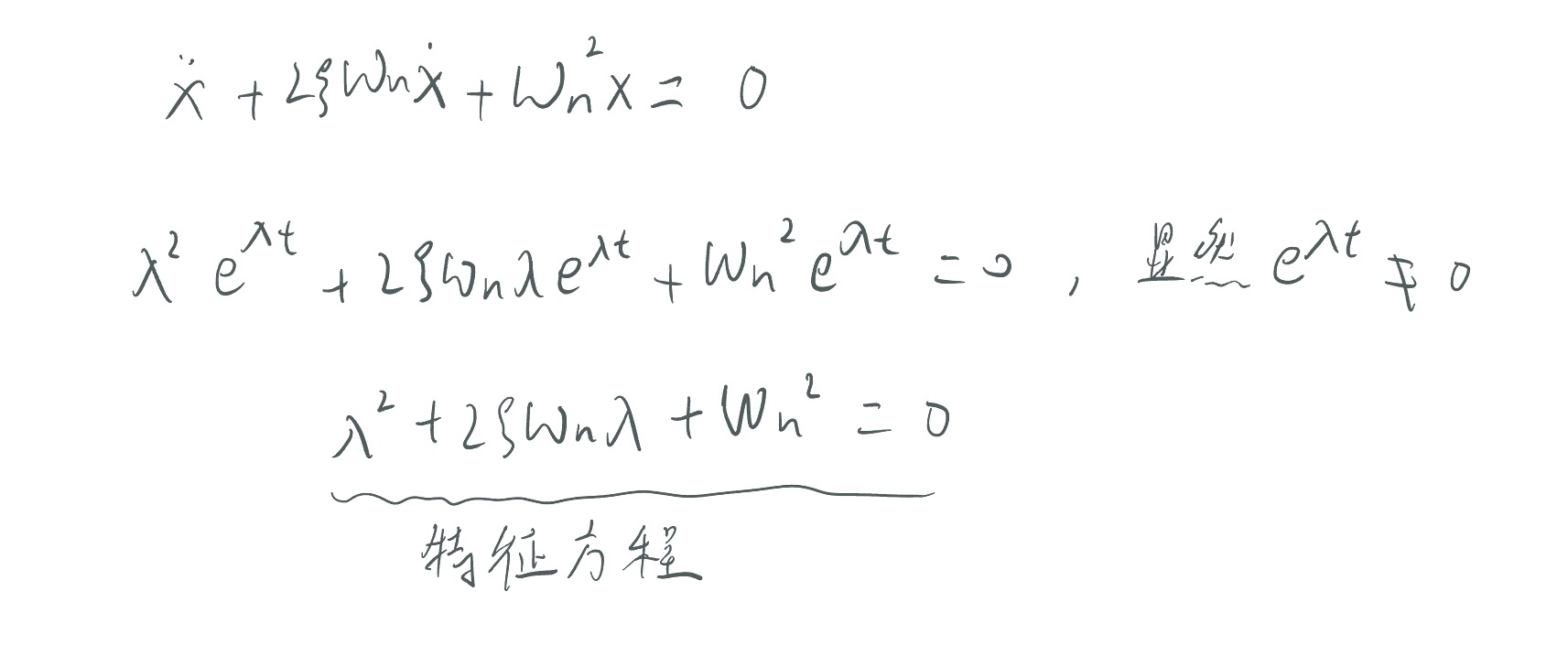
化简得到的这个二元一次方程就叫做特征方程(characteristic equation)。
为什么要单独给它命名呢,因为这个特征方程的解λ就是二阶微分方程的解的唯一未知参数,也就是说,解出这个特征方程,就等于解出了二阶微分方程,等于我们彻底掌握了二阶动态系统。
解一元二次方程用求根公式即可:
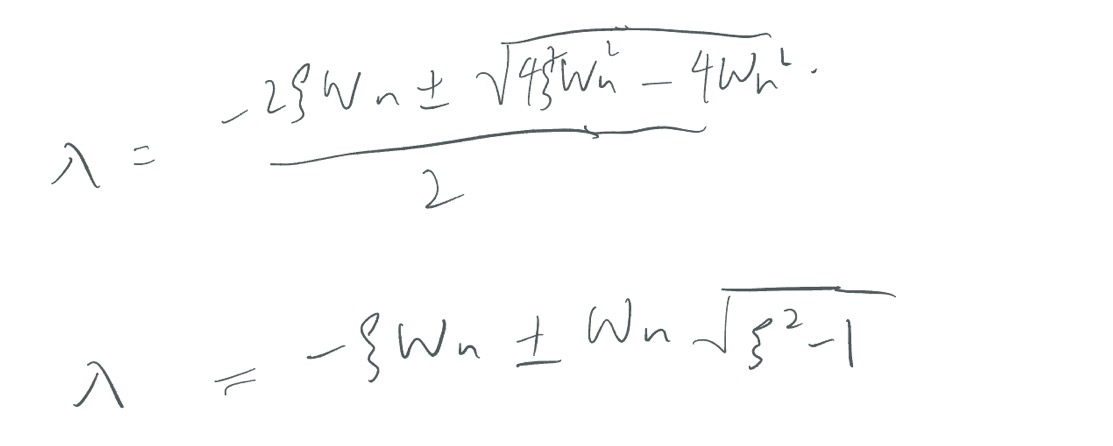 显然,不同的ζ值导致的结果也有很大的区别。
显然,不同的ζ值导致的结果也有很大的区别。
当ζ大于1时,λ的值为两个负实数,此时二阶系统的解为:
 输出由两个指数函数构成,一个收敛快一个收敛慢,因此系统收敛速度主要由收敛慢的那个决定。
输出由两个指数函数构成,一个收敛快一个收敛慢,因此系统收敛速度主要由收敛慢的那个决定。
而C1和C2的值则由X(0)和X’(0)的值决定。
什么意思呢,还是拿弹簧为例,λ代表了二阶微分方程的通解,即弹簧本身。但是弹簧具体如何运动则是包含在通解内的一个特解。
例如,我把弹簧拉长一厘米后松开,这和我把弹簧拉长两厘米后松开后的运动轨迹肯定是不同的。
一个X(0)为1cm,一个X(0)为2cm,显然后者的C1和C2值更大,也就是说弹簧振幅更大。
再比如我猛地击打弹簧,初始时刻弹簧的位置X(0)虽然还是0,但X’(0)不为0,弹簧自然会运动起来。若X(0)和X’(0)都是0,又没有外部施加的力,显然弹簧不会动,带入公式发现X(t)=0,也是符合理论的。
言归正传,我们把ζ>1的情况叫做过阻尼(over damped),此时系统输出类似这样:
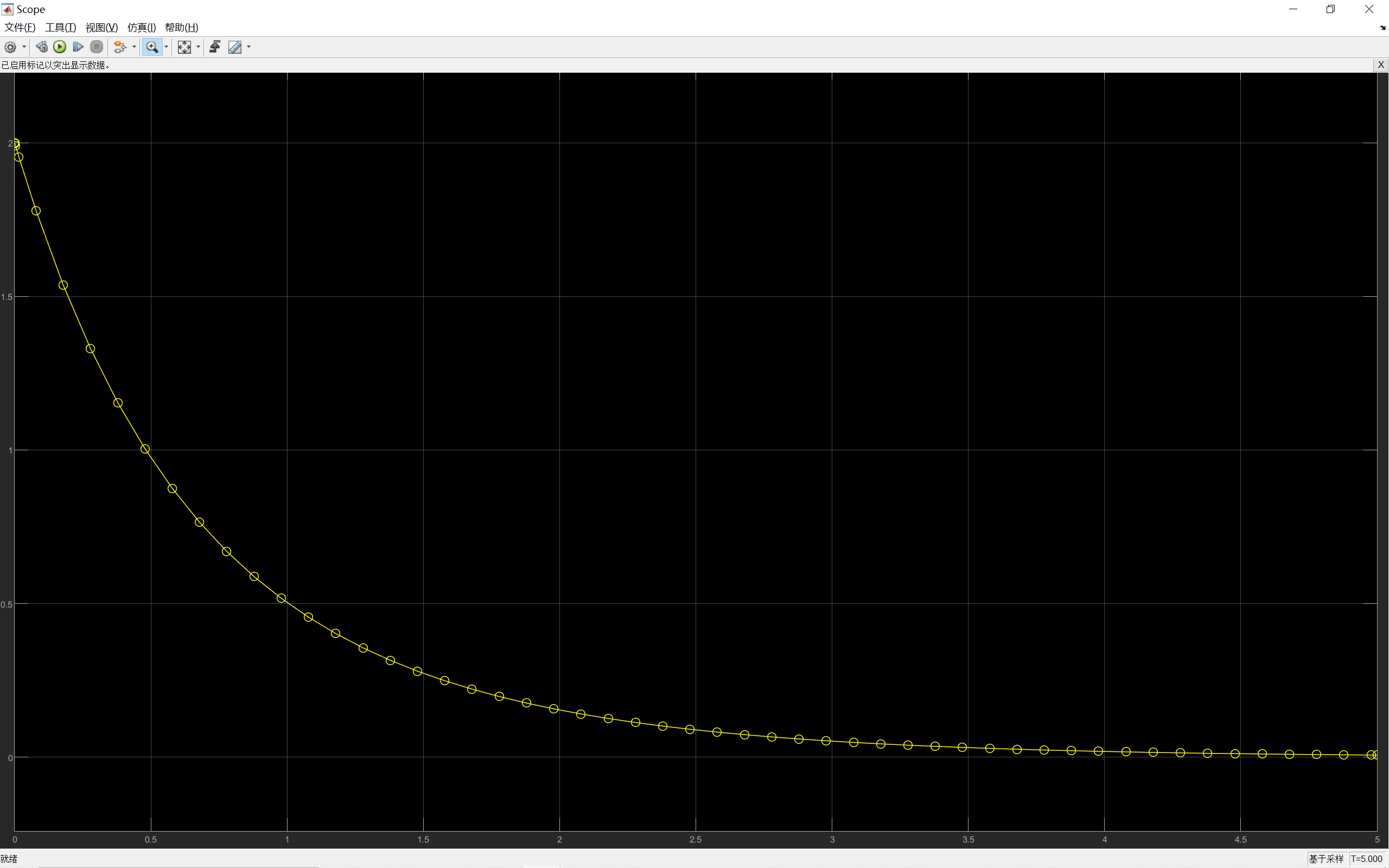 实际就是两个一阶系统相加,最终表现形式也非常相似。
实际就是两个一阶系统相加,最终表现形式也非常相似。
第二种情况是ζ刚好等于1时,此时λ只有一个解,和一阶系统等价,我们称之为临界阻尼(critical damped)。
第三种是最普遍的情况,即0<ζ<1,这时λ的解为共轭的两个复数,且实数部分依然小于零。弹簧就是一个典型的欠阻尼系统。
这种情况我们称之为欠阻尼(under damped)。
此时方程的通解为:
 果然和我们猜测的一样,弹簧的运动轨迹就是一个三角函数。
果然和我们猜测的一样,弹簧的运动轨迹就是一个三角函数。
在推导过程中我们令Wd=Wn(1-ζ2)-2,这个Wd被称作阻尼固有频率(damped natural frequency),注意观察,Wd,ζ,Wn是满足直角三角形关系的,感兴趣的可以参考我的b站视频《双控制器的并网逆变器设计,plecs仿真》17分30秒。
欠阻尼系统的输出由两部分组成,前面指数部分在衰减,乘以一个震荡的三角波,因此系统输出波形类似于这样:
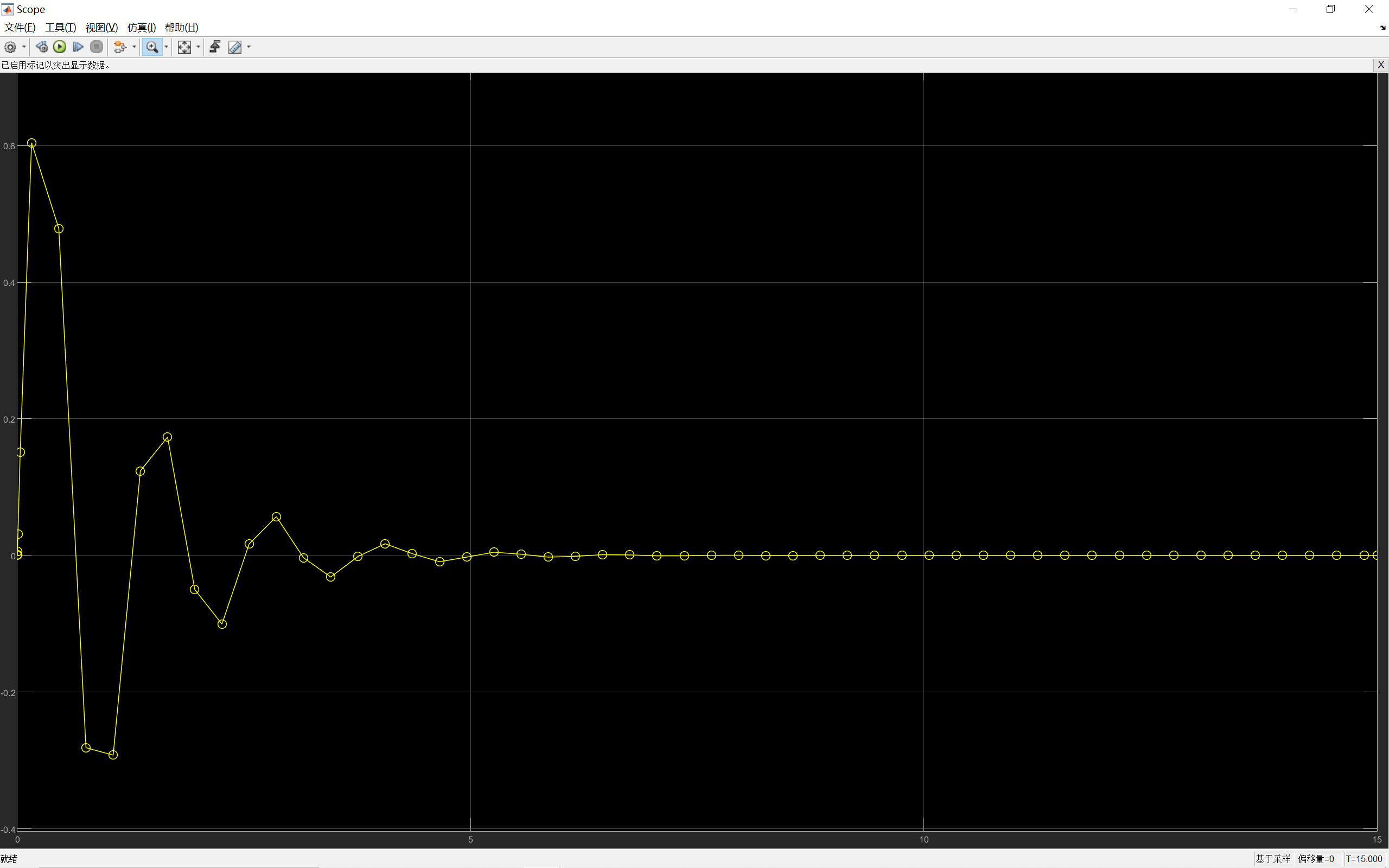 震荡的周期为2π/Wd。
震荡的周期为2π/Wd。
第四种是无阻尼系统,即ζ=0,这个时候就没有衰减的指数部分了,系统会永远震荡下去。
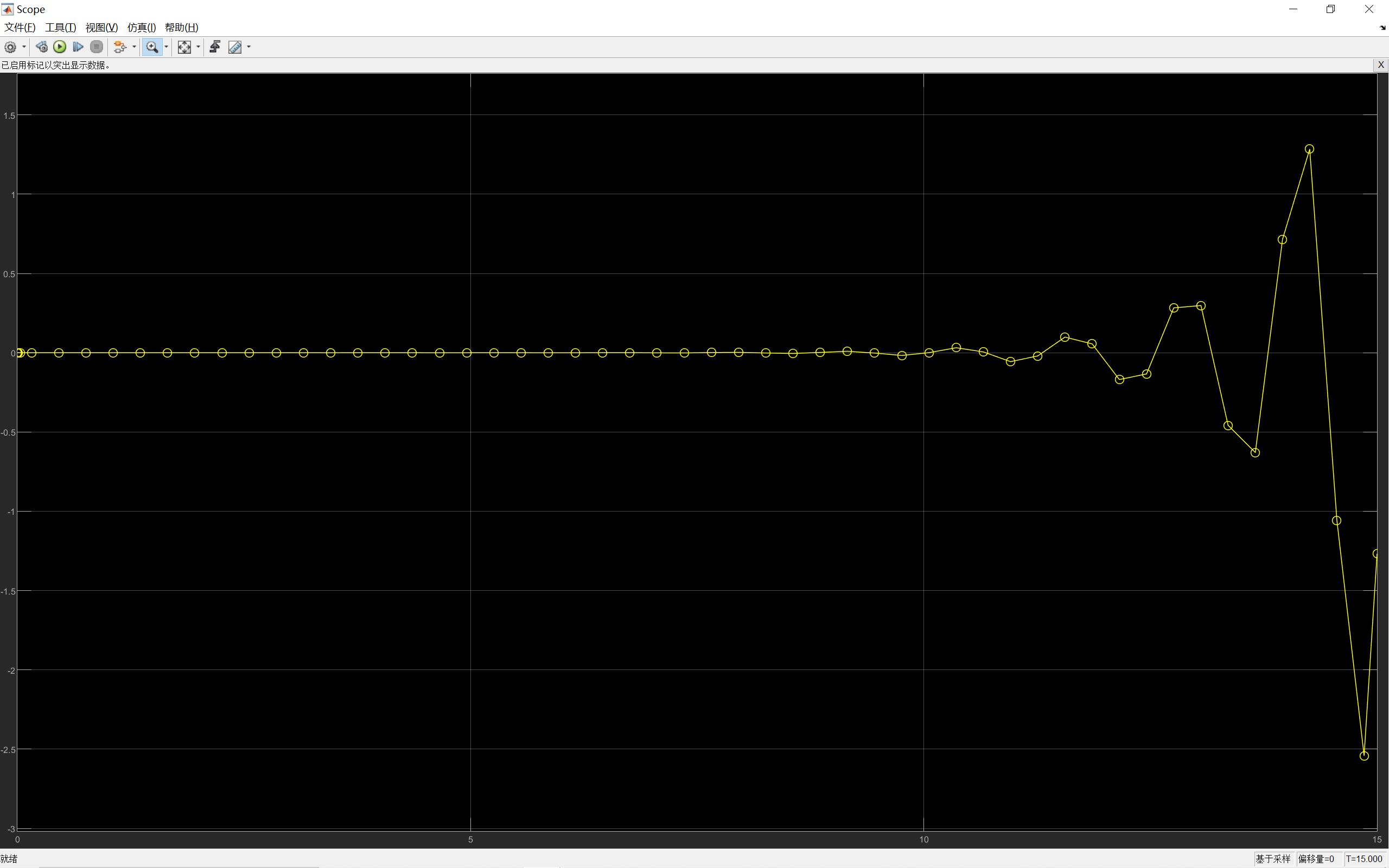
第五,六种情况分别是-1<ζ<0,ζ<-1。
这两种情况下λ的实数部分不为负数,也就是说微分方程的通解的指数部分不是衰减的,而是逐渐增大的,这意味着整个系统并不会趋于收敛,而是会震荡,不稳定:
 因此,λ实数部分为负时,系统稳定,实数部分为正时,系统不稳定,这就是我们判断系统稳定性的依据。
因此,λ实数部分为负时,系统稳定,实数部分为正时,系统不稳定,这就是我们判断系统稳定性的依据。
好,至此我们的二阶动态系统建模和分析就算完成了。这是自动控制理论最重要的一部分,理解了这个,就理解了自动控制理论的工程方面百分之九十的内容。
文章最后再杂谈一下,作为发散。
这篇文章我们只讨论了初始情况,但加上外部输入也是一样的,因为系统的输出会趋向于输入。比如外部输入为1时,欠阻尼系统的输出是这样的:
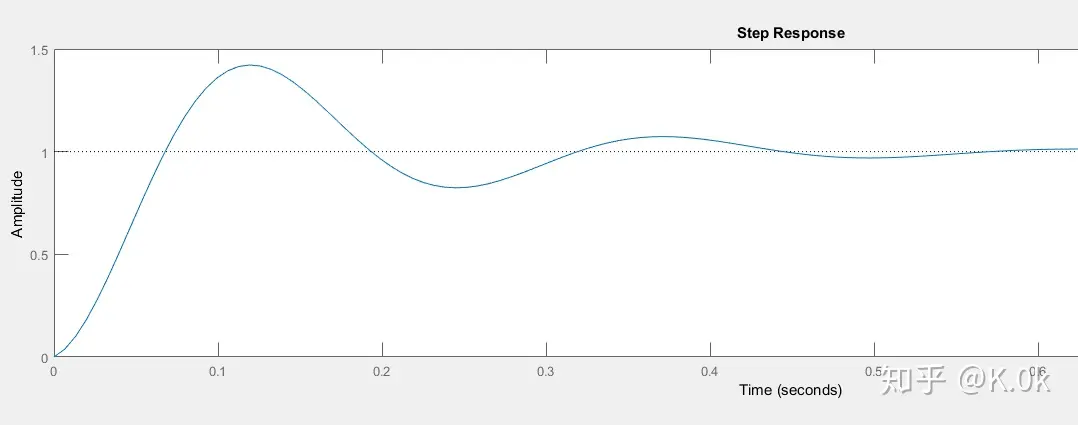
因为我们的目的是让系统的输出更快的等于输入,因此从某种意义上来说,其实所谓的控制,就是一个放大器。
我刚上大学的时候就很奇怪,既然我们有参考信号,为什么不直接把参考信号当做输出呢?
这是因为,参考信号往往驱动能力很差。比方说单片机上有一个5v引脚,我们可以直接用它给手机充电吗?显然别说智能手机了,就是诺基亚板砖都费劲。
再比如说自动驾驶,参考信号可能就是计算机里的一个数字,但我们能用这个数字去驱动整辆汽车的运动吗?
因此,我们需要把参考信号进行放大,增强它的驱动能力。
在后续文章中,我们继续讨论一阶二阶系统的阶跃响应和频率响应。
除此之外,正如我们所提到的,当系统的状态改变时或输入改变时,λ的值也在改变(实际就是通解下的多个特解),如果我们把λ变化的值在复平面上画出来,就会形成一条或多条轨迹,这个轨迹也被称为根轨迹。我们设计控制器实际上就是在设计λ的值,以及根轨迹的位置。
只要理解透彻这两篇文章的内容,设计控制器就是手到擒来,顺理成章的事了。

















 1708
1708

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









