







 本文详细介绍了Dijkstra算法用于求解带权重图中最短路径的问题,包括其原理、步骤和C++代码实现。算法利用优先级队列和贪心策略确保找到最优路径。
本文详细介绍了Dijkstra算法用于求解带权重图中最短路径的问题,包括其原理、步骤和C++代码实现。算法利用优先级队列和贪心策略确保找到最优路径。
参考博客:
(1)数据结构与算法 —— 最短路径Dijkstra算法(迪杰斯特拉)详细图解以及python实现
(2)基于图搜索的自动驾驶规划算法 - BFS,Dijstra,A*
(3)【算法学习笔记】 图(四)用优先级队列优化Dijkstra算法求最短路径(邻接矩阵存储)
1 图论基础
图有三种:无向图、有向图、带权重的图
无向图

有向图

带权重的图

Dijkstra算法:从起点开始逐步扩展,每一步为一个节点找到最短路径。
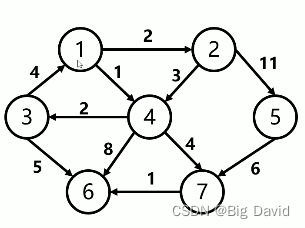
这是一个由多个节点,多个连接的边组成的有向图,每条边有一个权重,代表这条边的长度。现在,我们想从节点1到6,最短的路应该怎么走,最短的路径长度是多少?
主要步骤:
- 每次从未标记的节点中选择距离出发点最近的节点,标记,收录到最优路径集合中。
- 计算刚加入节点A的临近节点B的距离(不包含标记的点),若(节点A的距离+节点A到节点B的距离)<节点B的距离,就更新节点B的距离和前面点。
开始
将起点放入open_list中
While True
if open_list为空
搜索失败,结束
取open_list中g(n)最小的节点
将节点加入closed_list中
if 节点为终点
找到路径,结束
遍历当前节点未在closed_list中的临接节点
if 节点在open_list中
更新节点g(n)值
else
计算节点g(n)值,加入open_list
结束
open_list:节点到起点有路径的。
closed_list:收录以后的那些节点,找到到起点最短路径的那些节点。
| 出发点1 | 前进点 | |
|---|---|---|
| 1 | ∞ \infty ∞ | |
| 2 | ∞ \infty ∞ | |
| 3 | ∞ \infty ∞ | |
| 4 | ∞ \infty ∞ | |
| 5 | ∞ \infty ∞ | |
| 6 | ∞ \infty ∞ | |
| 7 | ∞ \infty ∞ |
选择距离出发点最近的节点1,标记,收录到最优路径集合中。
| 出发点1 | 前进点 | |
|---|---|---|
| 1 √ | 0 | |
| 2 | ∞ \infty ∞ | |
| 3 | ∞ \infty ∞ | |
| 4 | ∞ \infty ∞ | |
| 5 | ∞ \infty ∞ | |
| 6 | ∞ \infty ∞ | |
| 7 | ∞ \infty ∞ |
接着更新1临近节点4和2的距离,分别是1和2,接着在未标记的节点中寻找距离出发点最小的节点4,收录到最优路径节点中。
| 出发点1 | 前进点 | |
|---|---|---|
| 1 √ | 0 | |
| 2 | 2 | 1 |
| 3 | ∞ \infty ∞ | |
| 4 √ | 1 | 1 |
| 5 | ∞ \infty ∞ | |
| 6 | ∞ \infty ∞ | |
| 7 | ∞ \infty ∞ |
更新4临近节点3,6,7,接着在未标记的节点中寻找距离出发点最小的节点2,收录到最优路径节点中。
| 出发点1 | 前进点 | |
|---|---|---|
| 1 √ | 0 | |
| 2 √ | 2 | 1 |
| 3 | 3 (3< ∞ \infty ∞) | 4 |
| 4 √ | 1 | 1 |
| 5 | ∞ \infty ∞ | |
| 6 | 9 (9< ∞ \infty ∞) | 4 |
| 7 | 5 (5< ∞ \infty ∞) | 4 |
更新2临近节点5,接着在未标记的节点中寻找距离出发点最小的节点3,收录到最优路径节点中。
| 出发点1 | 前进点 | |
|---|---|---|
| 1 √ | 0 | |
| 2 √ | 2 | 1 |
| 3 √ | 3 (3< ∞ \infty ∞) | 4 |
| 4 √ | 1 | 1 |
| 5 | 13 (13< ∞ \infty ∞) | 2 |
| 6 | 9 (9< ∞ \infty ∞) | 4 |
| 7 | 5 (5< ∞ \infty ∞) | 4 |
更新3临近节点6,接着在未标记的节点中寻找距离出发点最小的节点7,收录到最优路径节点中。
| 出发点1 | 前进点 | |
|---|---|---|
| 1 √ | 0 | |
| 2 √ | 2 | 1 |
| 3 √ | 3 (3< ∞ \infty ∞) | 4 |
| 4 √ | 1 | 1 |
| 5 | 13 (13< ∞ \infty ∞) | 2 |
| 6 | 8(8<9 (9< ∞ \infty ∞)) | 3 |
| 7 √ | 5 (5< ∞ \infty ∞) | 4 |
更新7临近点6,接着在未标记的节点中寻找距离出发点最小的节点6,收录到最优路径节点中。
| 出发点1 | 前进点 | |
|---|---|---|
| 1 √ | 0 | |
| 2 √ | 2 | 1 |
| 3 √ | 3 (3< ∞ \infty ∞) | 4 |
| 4 √ | 1 | 1 |
| 5 | 13 (13< ∞ \infty ∞) | 2 |
| 6 √ | 6(6<8(8<9 (9< ∞ \infty ∞))) | 7 |
| 7 √ | 5 (5< ∞ \infty ∞) | 4 |
节点6临近点均已收录,无需更新,接着在未标记的节点中寻找距离出发点最小的节点5,收录到最优路径节点中。
| 出发点1 | 前进点 | |
|---|---|---|
| 1 √ | 0 | |
| 2 √ | 2 | 1 |
| 3 √ | 3 (3< ∞ \infty ∞) | 4 |
| 4 √ | 1 | 1 |
| 5 √ | 13 (13< ∞ \infty ∞) | 2 |
| 6 √ | 6(6<8(8<9 (9< ∞ \infty ∞))) | 7 |
| 7 √ | 5 (5< ∞ \infty ∞) | 4 |
回溯:
6的前面点是7,7的前面点是4,4的前面点是1,所以最短路径:1->4->7->6,长度是6。
2 Dijstra算法流程
Dijkstra算法基本原理:
Dijkstra算法是根据贪心算法实现的,首先找出当前点到所有能到达的点之间最短的距离,然后松弛一次继续循环。所谓松弛一次,就是在已经访问过的点中遍历一遍,看看有没有更近的,如果有更近的就更新距离。这样每次找最近的可达点+松弛遍历历史节点的操作,一直重复就能找到最短路径。
核心思想:
(1)相比BFS,Dijstra维护一个新变量g(n),g(n)表示从起始节点到当前节点的累积成本
(2)从openset(Min-priority queue)中访问累积成本g最低的节点
伪代码:
Dijstra(G, start, goal):
let open_list be priority_queue;
open_list.push(start, 0);
g[start] = 0;
while (!open_list.empty())
{
current = open_list.pop();
mark current as visited;
if (current is the goal) return current;
for (all unvisited neightbours next of current in G)
{
next_cost = g[current] + cost(current, next);
if (next is not in open_list)
open_list.push(next, next_cost);
else {
if (g[next] > next_cost)
g[next] = next_cost;
}
}
}
Dijstra算法满足最优性,但是缺少对终点的启发性,对于求两点之间的最短距离,效率是低效的。
3 手撕Dijstra算法
#include <iostream>
#include <cmath>
#include <vector>
#include <algorithm>
#include <string>
using namespace std;
struct Point {
int x, y;
Point(int x, int y) : x(x), y(y) {};
double distance(Point p) {
return sqrt((x - p.x) * (x - p.x) + (y - p.y) * (y - p.y));
}
};
// 定义节点
struct Node {
Point point; // 点的位置
double g; // 到起点的距离
Node* parent;
Node(Point point, double g, Node* parent = NULL) : point(point), g(g), parent(parent) {};
};
// 比较函数
struct NodeCompare {
bool operator()(Node* n1, Node* n2) {
return n1->g < n2->g; // 升序排列,保证第一个最小
}
};
// Dijstra路径规划主算法
vector<Point> Dijstra(vector<vector<int>>& gridmap, Point& start, Point& goal) {
int row = gridmap.size();
int col = gridmap[0].size();
// 定义openlist和closelist
vector<Node*> openlist; // 存储待搜索的节点
vector<Node*> closelist;// 存储已经搜索的节点
openlist.push_back(new Node(start, start.distance(start))); // 将起点放入openlist
// 寻找路径
vector<Point> path;
while (!openlist.empty()) {
// 从openlist中取出g最小的节点作为当前搜索节点
sort(openlist.begin(), openlist.end(), NodeCompare{});
Node* current = *openlist.begin();
openlist.erase(openlist.begin());// current取出之后从openlist中删除
closelist.push_back(current);// current放入closelist
// 1 找到终点 回溯路径
if (current->point.x == goal.x && current->point.y == goal.y) {
while (current != NULL) {
path.push_back(current->point);
current = current->parent;
}
reverse(path.begin(), path.end());
return path;
} else {// 2 不是终点,对current的邻近节点进行扩展讨论
int x = current->point.x;
int y = current->point.y;
vector<Point> neighbors = {
{x-1,y-1},{x-1,y},{x-1,y+1},
{x,y-1}, {x,y+1},
{x+1,y-1},{x+1,y},{x+1,y+1}
};
// 对邻近节点遍历
for (auto n : neighbors) {
// 节点n在地图范围内,同时不是障碍物
if (n.x >= 0 && n.x < row && n.y >= 0 && n.y < col && gridmap[n.x][n.y] == 0) {
// 节点在closelist中直接跳过
bool incloselist = false;
for (auto c : closelist) {
if (c->point.x == n.x && c->point.y == n.y) {
incloselist = true;
break;
}
}
if (incloselist) continue;
// 节点是否在openlist中
bool inopenlist = false;
for (auto o : openlist) {
if (o->point.x == n.x && o->point.y == n.y) {
inopenlist = true;
// 节点在openlist中需要更新g和parent
double g = current->g + n.distance(current->point);
if (g < o->g) { // 距离更小,替换父节点
o->g = g;
o->parent = current;
}
break;
}
}
if (!inopenlist) { // n不在openlist中需要将n加入到openlist中
double g = current->g + n.distance(current->point);
openlist.push_back(new Node(n, g, current));
}
}
}
}
}
// 如果在寻路阶段未能搜索到路径,直接返回空路径结果
return path;
}
// 基于栅格地图的Dijstra路径规划算法 C++实现
int main() {
vector<vector<int>> gridmap = { // 栅格地图
{0,1,0,1,0},
{1,0,1,0,1},
{0,1,1,1,0},
{0,0,1,0,0},
{0,1,0,1,0}
};
Point start(0, 0);
Point goal(4, 4);
vector<Point> path = Dijstra(gridmap, start, goal);
cout << path.size() << endl;
for (auto p : path) {
if (p.x == goal.x && p.y == goal.y) {
cout << "(" << p.x << "," << p.y << ")" << endl;
} else {
cout << "(" << p.x << "," << p.y << ")" << "->";
}
}
return 0;
}















 827
827











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









