







一,取消SL/ST的迭代
Apollo3.5 取消了SL/ST的迭代,因为车辆速度变化较为频繁,幅度较大,导致预测的轨迹变化较大,则ST变化较大.若ST影响SL,则SL变化较大,即PATH变化较大,这是我们不希望看到的,PATH必须相对稳定.
二,对于动态障碍物,我们ST图的Search决策是:先PASS,若PASS不可行,则Yield.
因为只有障碍物速度对于EGO我们才会考虑它,若障碍物速度高于ego,一般情况下障碍物不会影响EGO.
三,SL以reference line(参考线)为自然坐标系Frenet,而ST是以SL的结果(path)为自然坐标系Frenet,这是很大的不同!!!
四,SL中如何考虑动态障碍物(SL的重点和难点,将专门写一篇文章来描述)
path search就是在SL图上进行search,所以对于动态障碍物,我们得想办法投影到SL图上.不同于ST图以path为参考路径,SL图总是以reference line(nomianl path)为参考路径.
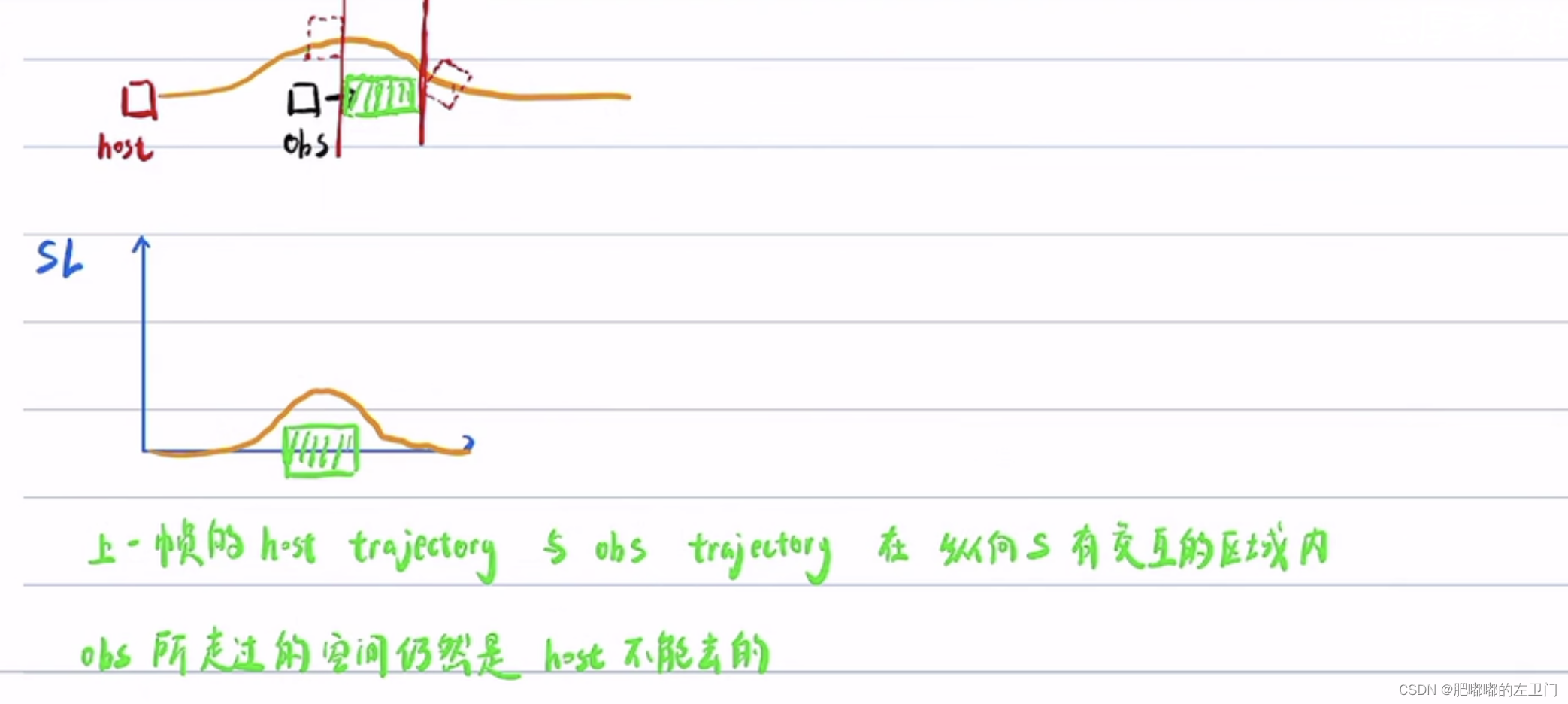
如何找到上一帧host trajectory与obs trajectory在纵向S有交互的区域:
通过ST图找到ego与动态障碍物在纵向(s)上有重叠的区域,这里仅考虑纵向s是否有重叠,将这段纵向s有重叠的区域动态障碍物的预测轨迹投影到SL图上,结合静态障碍物,boundary,up/down 最终在SL上搜索一条最优的路径















 3706
3706











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









