






在学习过程中记录一些自己容易忘记的linux和ROS2的指令,顺便在学习过程中梳理一下大致思路。
基础指令
linux指令(默认),防止忘记:
输入法切换:ctrl+空格
复制粘贴:ctrl+shift+c/v
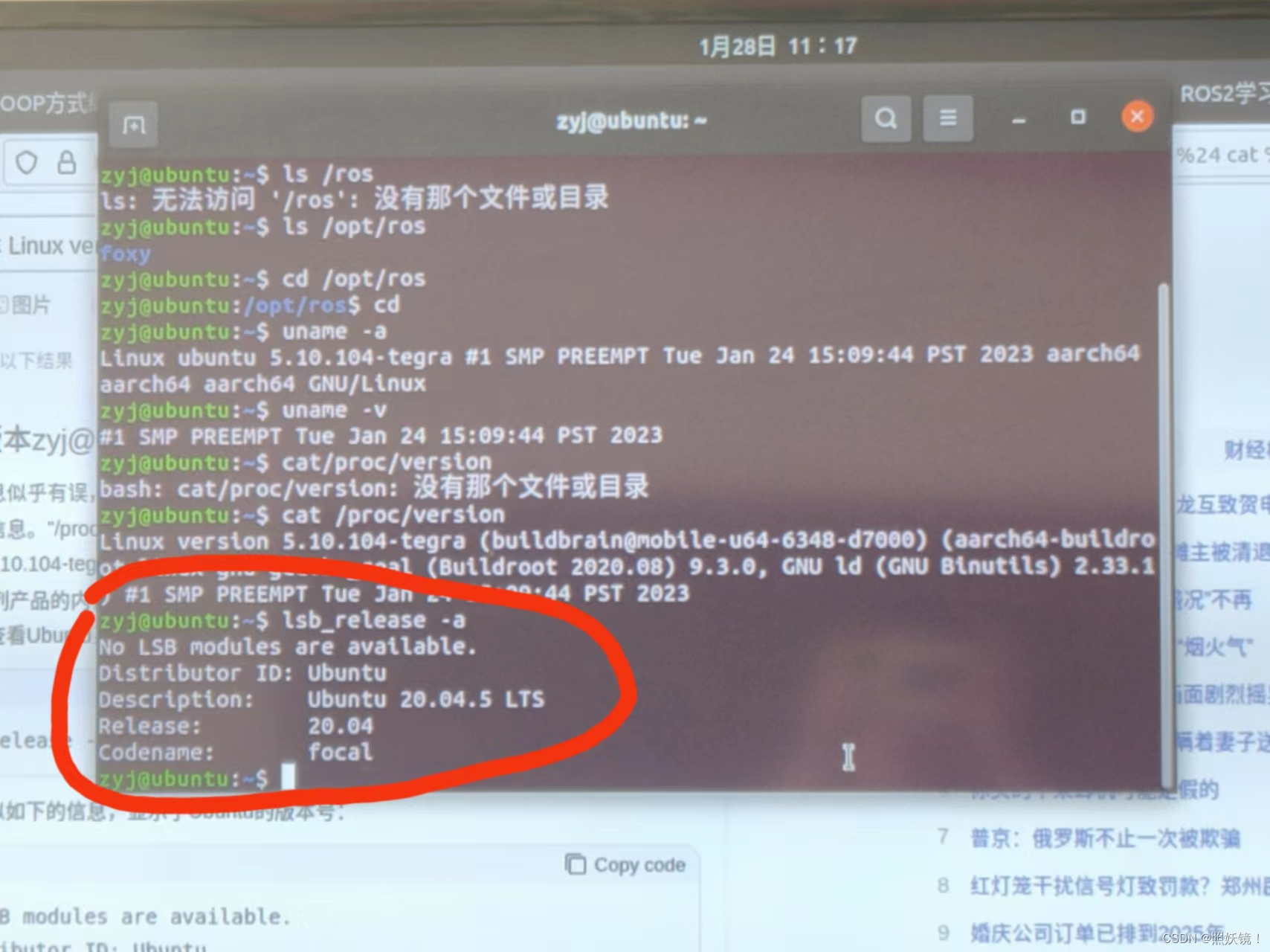
查看ubuntu 版本
lsb_release -a
查看ROS2版本
printenv | grep -i ROS
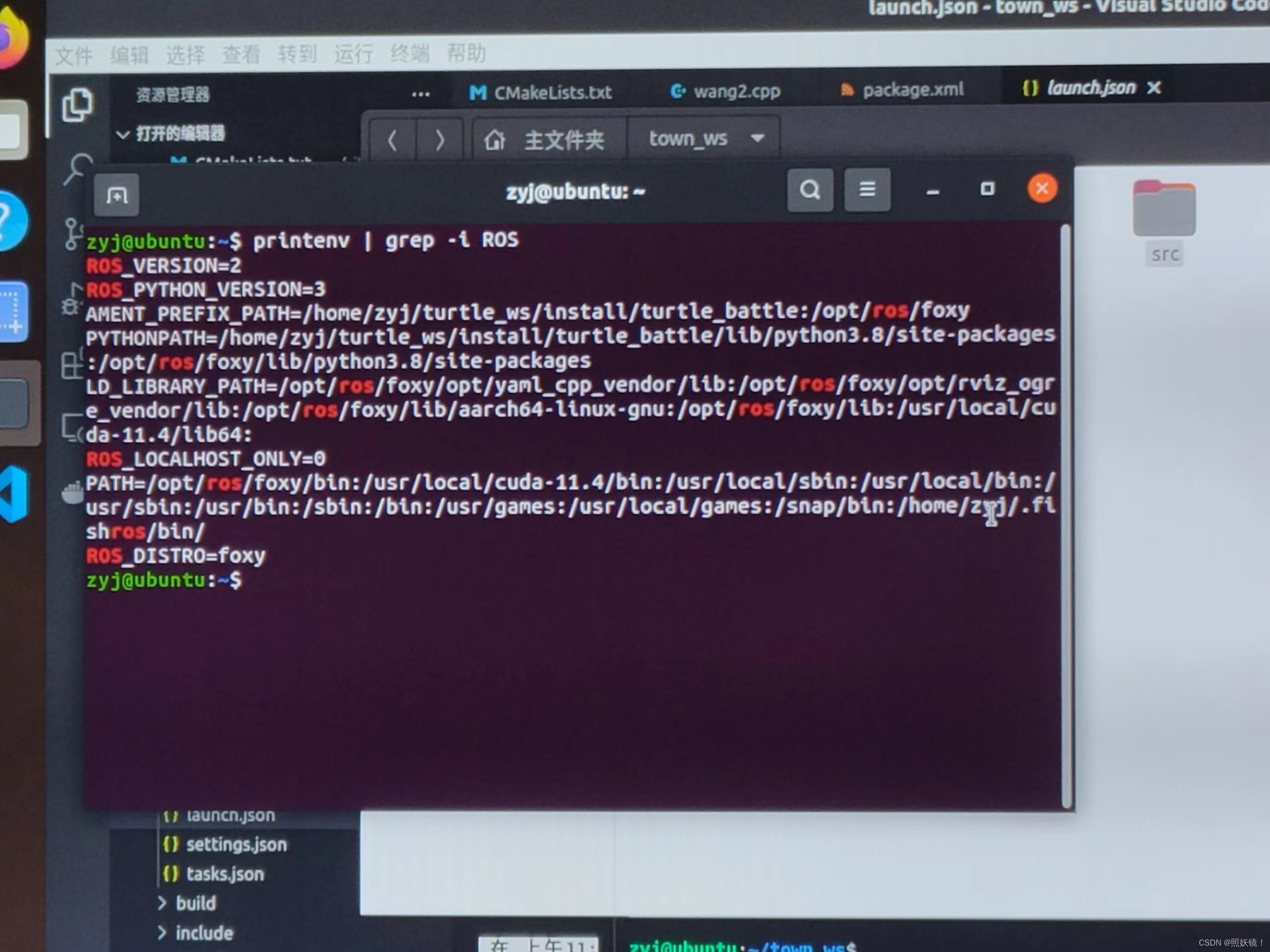
一般来说,ROS的系统路径为:/opt/ros
ROS2节点建立一般步骤
1.建立工作空间(shell)文件夹
mkdir -p shell_name(e.g.turtle_ws)/src
cd turtle_ws/src
用命令行指令一次新建工作空间文件夹及其下的src文件夹
2.创建功能包
逻辑上是:工作空间下可包含很多个功能包,每个功能包下有很多个节点
创建pkg使用指令:
python:
ros2 pkg create pkg_name --build-type ament_python --dependencies rclpy
c++:
ros2 pkg create pkg_name --build-type ament_cmake --dependencies rclcpp
3.写节点代码
python:
1.首先在__init__.py的同级文件夹下建立与节点名字相同的python文件。
该文件中要写:
ros2运行该节点的入口函数
编写ROS2节点的一般步骤
1. 导入库文件
2. 初始化客户端库
3. 新建节点对象
4. spin循环节点
5. 关闭客户端库

图片截取自鱼香ros的教学博客
2.然后在setup文件末尾加上两句,目的是告诉ROS2新的节点要去哪个路径寻找。
entry_points={
'console_scripts': [
"li4_node = village_li.li4:main"
],
},
)
c++
1.在src文件夹下建立节点同名cpp文件,然后编写相关内容:

道理同上,
- 导入库文件,
- 进行初始化,
- 新建节点,
- spin节点,
- shutdown节点
2.修改cmakelist.txt
最后加上下面两句,目的是让编译器编译wang2.cpp这个文件。
add_executable(wang2_node src/wang2.cpp)
ament_target_dependencies(wang2_node rclcpp)
再加上,是手动将编译好的文件安装到lib/node_name 下
install(TARGETS
wang2_node
DESTINATION lib/${PROJECT_NAME}
)
编写相应文件到此结束,记得保存再编译,否则最新改变不会被编译进去。
c++的编写相对py要麻烦一点,但是会比py跑的快。
4.编译节点
首先,
colcon build
然后sourse ,更新一下
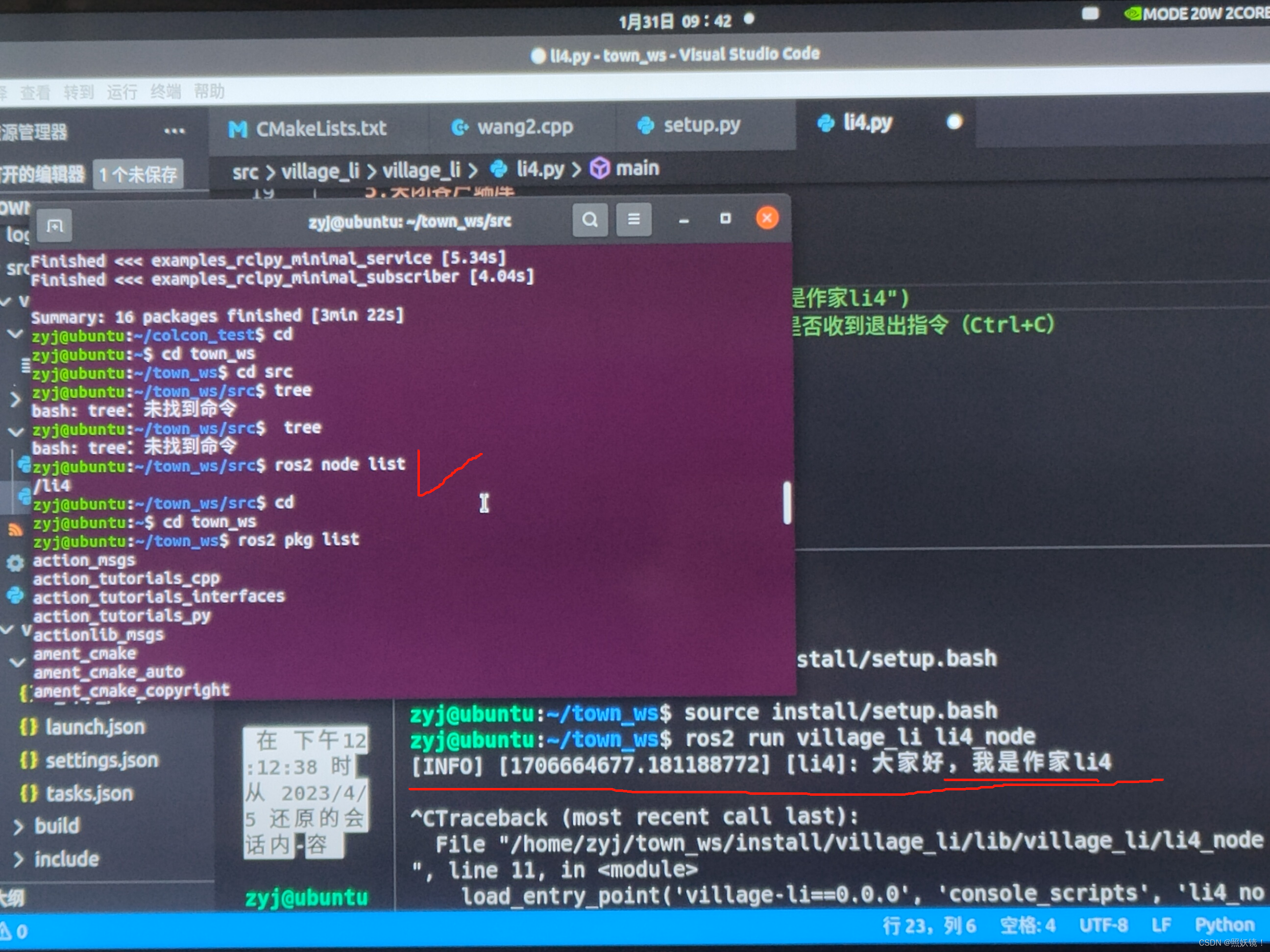
source install/setup.bash
最后运行
ros2 run pkg_name node_name
节点就运行起来了。
节点就运行起来后,可以在src文件下使用指令:
ros2 node list
找到正在运行的节点。如下:(截至到红线部分)
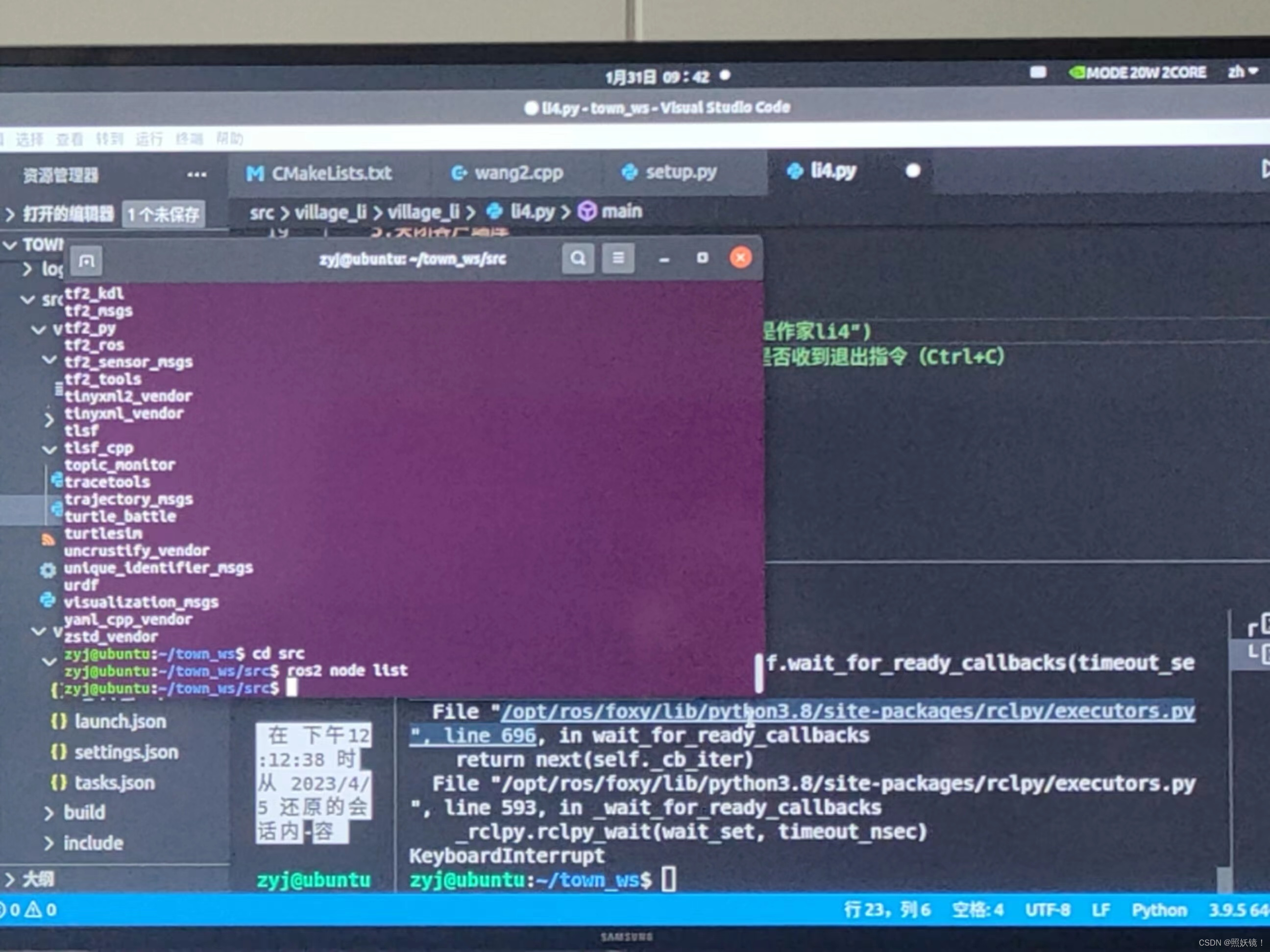
输入ctrl+c,shutdown节点。再用这个指令,就没有节点在了。















 948
948











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









