







Fast-Lio2
2022 8 IEEE Transactions on Robotics
Wei Xu; Yixi Cai; Dongjiao He; Jiarong Lin; Fu Zhang 港大火星实验室
论文
FAST-LIO2: Fast Direct LiDAR-Inertial Odometry
1.1 系统框架
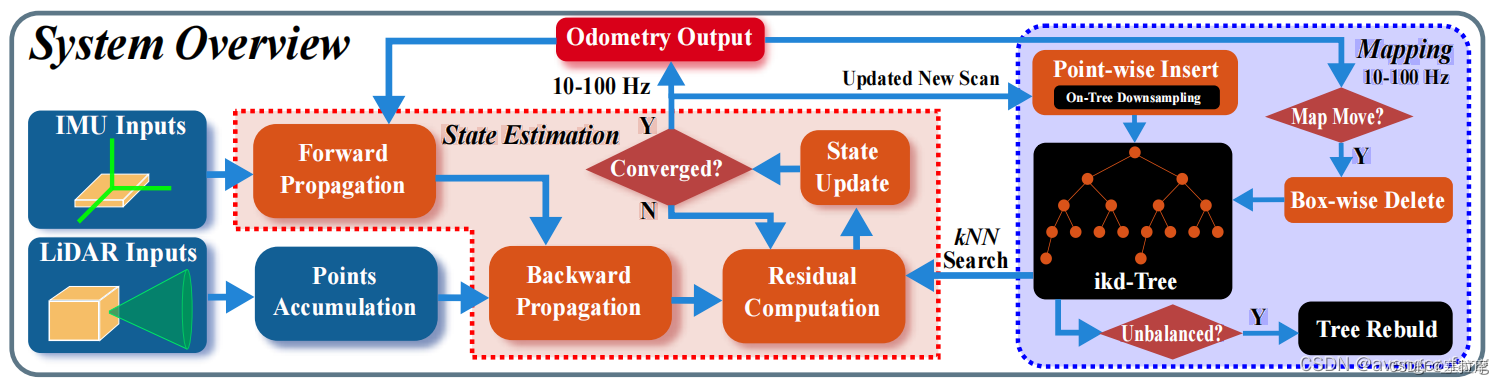
紧耦合 迭代误差卡尔曼滤波,不提取特征( 人工设计的特征对于不雷达的适配性能不同,也容易受环境影响),使用ikd-tree支持增量更新,雷达数据的一次scan可以是10ms~100ms之间,因此定位频率可以修改
1.2 LIO
与Fast-Lio一样,基于误差状态的迭代卡尔曼滤波,当时增加了外参的估计
KaTeX parse error: Got group of unknown type: 'internal'
运动模型
对应着IMU预积分与协方差矩阵传播
x
i
+
1
=
x
i
⊞
(
Δ
t
f
(
x
i
,
u
i
,
w
i
)
)
\begin{equation*} \begin{aligned} \mathbf x_{i+1} &= \mathbf x_{i} \boxplus \left(\Delta t \mathbf f(\mathbf x_i, \mathbf u_i, \mathbf w_i) \right) \end{aligned} \tag{4} \end{equation*}
xi+1=xi⊞(Δtf(xi,ui,wi))(4)
KaTeX parse error: Got group of unknown type: 'internal'
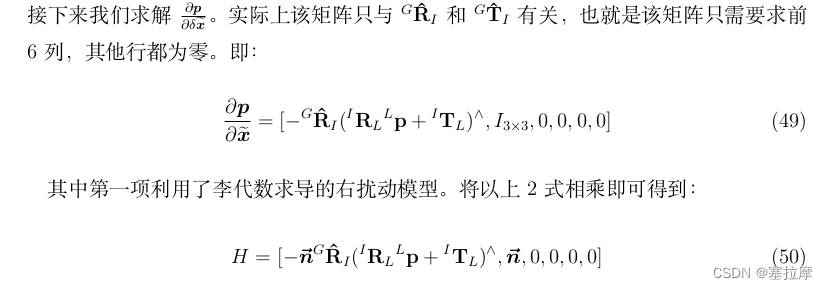
测量模型
运动补偿每个点投影到扫描结束时刻,在投影到全局地图与最近邻点拟合的平面计算残差(这里残差等于0是因为雷达系系的点减去了噪声的影响,因此就是真实值)
0
=
G
u
j
T
(
G
T
I
k
I
T
L
(
L
p
j
+
L
n
j
)
−
G
q
j
)
\begin{equation*} \begin{split}\; \mathbf 0 = {}^G \mathbf u_j^T \left({}^G {\mathbf T}_{I_k} {}^{I}{\mathbf T}_{L} \left({}^{L}{\mathbf p}_{j} + {}^{L}{\mathbf n}_{j} \right) - {}^G\mathbf q_j \right) \end{split} \tag{8} \end{equation*}
0=GujT(GTIkITL(Lpj+Lnj)−Gqj)(8)
对噪声(误差状态)的观测方程
0
=
h
j
(
x
k
,
L
n
j
)
≜
G
u
j
T
(
G
T
I
k
I
T
L
(
L
p
j
+
L
n
j
)
−
G
q
j
)
\begin{equation*} \begin{split}\; \mathbf 0 \! = \! \mathbf h_j\!\left({\mathbf x}_k, \! {}^{L}{\mathbf n}_j \right) \triangleq {}^G \mathbf u_j^T \!\!\left({}^G {\mathbf T}_{I_k}\! {}^{I}{\mathbf T}_{L} ({}^{L}{\mathbf p}_{j} \!+\! {}^{L}{\mathbf n}_{j}) \!- \!{}^G\mathbf q_j \right) \end{split} \tag{9} \end{equation*}
0=hj(xk,Lnj)≜GujT(GTIkITL(Lpj+Lnj)−Gqj)(9)
IMU预积分的中状态传播,误差卡尔曼滤波
x
^
i
+
1
=
x
^
i
⊞
(
Δ
t
f
(
x
^
i
,
u
i
,
0
)
)
;
x
^
0
=
x
ˉ
k
−
1
P
^
i
+
1
=
F
x
~
i
P
^
i
F
x
~
i
T
+
F
w
i
Q
i
F
w
i
T
;
P
^
0
=
P
ˉ
k
−
1
\begin{equation*} \begin{aligned} \widehat{ \mathbf x}_{i+1} &= \widehat{ \mathbf x}_{i} \boxplus \left(\Delta t \mathbf f (\widehat{\mathbf x}_i, \mathbf u_i, \mathbf 0) \right); \ \widehat{\mathbf x}_{0} = \bar{\mathbf x}_{k-1}\\ \widehat{\mathbf P}_{i+1} &= \mathbf F_{\widetilde{\mathbf x}_i}\widehat{\mathbf P}_{i}\mathbf F_{\widetilde{\mathbf x}_i}^T + \mathbf F_{\mathbf w_i} \mathbf Q_i \mathbf F_{\mathbf w_i}^T; \ \widehat{\mathbf P}_{0} = \bar{\mathbf P}_{k-1} \end{aligned} \tag{10} \end{equation*}
x
i+1P
i+1=x
i⊞(Δtf(x
i,ui,0)); x
0=xˉk−1=Fx
iP
iFx
iT+FwiQiFwiT; P
0=Pˉk−1(10)
H矩阵:
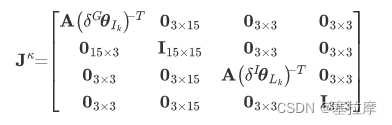
迭代卡尔曼滤波
在迭代过程中还更新了协方差,有一些文论里面没有更新协方差,
A
(
)
−
T
A()^{-T}
A()−T就是右雅克比方程u就是R误差状态的增量的旋转向量
x
k
⊟
x
^
k
=
(
x
^
k
κ
⊞
x
~
k
κ
)
⊟
x
^
k
=
x
^
k
κ
⊟
x
^
k
+
J
κ
x
~
k
κ
∼
N
(
0
,
P
^
k
)
\begin{equation*} \begin{aligned} \mathbf x_k \boxminus \widehat{\mathbf x}_k &= \left(\widehat{\mathbf x}_{k}^\kappa \boxplus \widetilde{\mathbf x}_{k}^\kappa \right) \boxminus \widehat{\mathbf x}_k = \widehat{\mathbf x}_{k}^\kappa \boxminus \widehat{\mathbf x}_{k} + \mathbf J^\kappa \widetilde{\mathbf x}_{k}^\kappa \\ & \sim \mathcal {N}(\mathbf 0, \widehat{\mathbf P}_{k}) \end{aligned} \tag{14} \end{equation*}
xk⊟x
k=(x
kκ⊞x
kκ)⊟x
k=x
kκ⊟x
k+Jκx
kκ∼N(0,P
k)(14)
计算卡尔曼增益,更新状态量
K
=
(
H
T
R
−
1
H
+
P
−
1
)
−
1
H
T
R
−
1
x
^
k
κ
+
1
=
x
^
k
κ
⊞
(
−
K
z
k
κ
−
(
I
−
K
H
)
(
J
κ
)
−
1
(
x
^
k
κ
⊟
x
^
k
)
)
.
\begin{equation*} \begin{split}\; \mathbf K &= \left(\mathbf H^T {\mathbf R}^{-1} \mathbf H + {\mathbf P}^{-1} \right)^{-1}\mathbf H^T \mathbf R^{-1} \\ \widehat{\mathbf x}_{k}^{\kappa +1} & = \widehat{\mathbf x}_{k}^{\kappa } \! \boxplus \! \left(-\mathbf K {\mathbf z}_k^\kappa - (\mathbf I - \mathbf K \mathbf H) (\mathbf J^\kappa)^{-1} \left(\widehat{\mathbf x}_{k}^{\kappa } \boxminus \widehat{\mathbf x}_{k} \right) \right). \end{split} \tag{18} \end{equation*}
Kx
kκ+1=(HTR−1H+P−1)−1HTR−1=x
kκ⊞(−Kzkκ−(I−KH)(Jκ)−1(x
kκ⊟x
k)).(18)
迭代到误差增量足够小时停止
x
ˉ
k
=
x
^
k
κ
+
1
,
P
ˉ
k
=
(
I
−
K
H
)
P
.
\begin{equation*} \begin{split}\; \bar{\mathbf x}_{k} &= \widehat{\mathbf x}_{k}^{\kappa +1},\ \bar{\mathbf P}_k = \left(\mathbf I - \mathbf K \mathbf H \right) {\mathbf P}. \end{split} \tag{19} \end{equation*}
xˉk=x
kκ+1, Pˉk=(I−KH)P.(19)
利用优化完的位姿将此帧的雷达点投影到世界坐标系下并插入ikd-tree中
1.3 ikd-tree
https://zhuanlan.zhihu.com/p/529926254
https://github.com/KennyWGH/ikd-Tree-detailed
增量构建的kd-tree数据结构(ikd-Tree),可以有效地表示一个很大的点云。除了最近邻搜索外,还支持增量地图更新(即点插入、树上降采样、点删除)和以最小的计算成本进行动态重新平衡。由于ikd-Tree的计算效率有所提高,直接将原始点匹配到地图上(不需要降采样),即使在剧烈的运动和非常杂乱的环境中,也能实现更准确可靠的扫描匹配。
直接配准原始点云的方法与广义ICP(G-ICP)非常相似,G-ICP假设环境是平滑的,因此可以视为一个平面,一个点被配准到地图上的一个小的局部平面上。广义icp的计算负荷通常是较大,基于正态分布变换(NDT)也配准了原始点,但NDT比ICP的稳定性较低,在某些场景中可能存在发散不收敛情况。
全局地图的维护
如果当前激光雷达的FOV越过地图边界,则从ikd-Tree中删除距离LiDAR姿态最远的历史点云(一旦越过边界获得更大地图范围触发ikd-tree重构最远点)。ikd-Tree跟踪一个具有一定长度(地图大小)的大立方体区域中的所有地图点(滑窗)并用于计算状态估计模块中的残差。优化后的姿态最终将新scan中的点配准到全局帧中,并通过以里程计的频率插入到ikd-Tree中,将它们合并到全局地图中。
新地图区域和旧地图区域之间的减法区域中的所有点将从ikd-Tree中删除。
ikd-tree的数据结构
一颗二叉搜索树,节点包含了点的属性(包括坐标,强度)+左右子节点的指针+当前节点所有(孙)子节点的个数+布尔变量表示该节点是否被删除+一个子树构成的长方体的两个顶点坐标
struct TreeNode{
PointType point; //当前点的坐标强度等信息
TreeNode* leftchild, rightchild;//左右子节点的指针
int axis; //分割空间的轴
int treesize, invalidnum;//该节点所有子节点的总数,被删除的子节点总数
bool deleted, treedeleted;//该节点是否删除,以该节点为根节点的树是否删除,tree表示删除
CuboidVertices range;//所有子节点所在的长方体,存储了两个顶点的坐标
}
ikd-Tree 中充分利用了数据结构部分提到的 range信息 来进行剪枝加速,也即在每个节点处,除了计算节点本身与查询点的距离之外,也会分别判断左右两个子树的range 是否与目标解空间有重叠,只有有重叠的子树才会被继续递归搜索,没重叠的子树将直接被剪枝掉,实现搜索加速。
构造树
构建 ikd-Tree 类似于构建静态 k-dree。ikd-Tree 沿最长维度递归地分割中点处的空间,直到子空间中只有一个点。 Data Structure 中的属性在构建过程中被初始化,包括计算树的大小和(子)树的范围信息。
树的平衡判断
实现动态再平衡的前提条件是,首先要知道哪些 (sub)tree 是不平衡的。因此,ikd-Tree 提出了一个准则来随时判断任何一个 (sub)tree 平衡与否。这个准则包含两个小准则,如下:
a-balanced 准则描述的是我们最大能够容忍一个subtree的左右两侧有多不平衡,否则就会被执行重构;0.5是最平衡的
a-deleted描述的是最多能够容忍一个subtree中“被标记为删除、但是还没真正删除的点“的比例,否则就会执行重构。
当且仅当两项准则都符合时,才会认为一个 (sub)tree 是平衡的。
树的再平衡算法
双线并行重建,重建ikd树的时间复杂度为O(n ),对于单线程重建,时间复杂度为O(n log n)。
当ikd-Tree通过平衡性判据发现某一个(sub)tree不平衡时,就会触发对该(sub)tree的重建,以实现再平衡。这里又分为两种情况,如果该(sub)tree规模很小,重建时间花销可以忽略,就在主线程中直接重建,重建时先把(sub)tree的所有节点打乱重排,在这一过程中会拿掉标记删除的点(Flatten);然后,对剩下的点按中值点法执行常规的kdtree构建过程;构建完成后,把新的子树替换到原来的位置,完成。
如果需要重建的(sub)tree规模很大,重建时间花销不可忽略;如果在主线程中执行重建,就会导致ikd-Tree一直被占用,外部的SLAM/LIO算法无法访问ikd-Tree执行查询或增删操作 —— 导致算法阻塞。
针对这种情况,ikd-Tree 采取了一种双线程策略,耗时的重建过程在额外的线程中执行,主线程仍旧对外提供查询和增删服务,其中涉及到“正在重建的(sub)tree”的增删操作会被额外缓存到一个叫作OperationLogger的容器中;待额外线程中完成了重建后,会从OperationLogger把增删操作“补”到新的(sub)tree上,这样就确保了新的(sub)tree没有漏掉任何过程;最后,把新子树替换到相应位置,完成。
树的增量更新
持两种类型的增量操作: 逐点操作和按框操作。 逐点操作在 kd-tree中插入、删除或重新替换单个点,而按框操作在给定的轴对齐长方体中插入、删除或替换所有点。在这两种情况下,点插入都与降采样相集成,从而将地图保持在预定的分辨率。
点插入与降采样 时间复杂度Olog(n)
首先将整个空间体素化,并明确新点落入哪个体素(目标体素),也就是将待插入点划分为空间中的一个长方体内;
然后向ikd-Tree查询目标体素在哪一个长方体内,且该长方体是否已经有点以及有哪些点(查询过程参考box-wise delete);
如果已经有点了,将已有点和新点一起排序,找出离体素中心最近的那个点,然后做判断:如果最近的点是已有点,意味着新点无必要再插入了,结束处理;如果最近的点是新点,则把已有点全部标记删除,并插入新点;
如果体素内尚不存在点,则直接插入新点。
ikd-Tree删除节点
在SLAM中,我们希望能够按照空间区域批量地删除点 —— 对应着 map跟随pose移动而移动。
在ikd-Tree中,这个操作叫作 box-wise delete,输入一个立方体区域给ikd-Tree,ikd-Tree删除这个区域内的所有点。*
box-wise delete 结合了range信息和 lazy delete 策略,以下图为例:红/绿/蓝色的框代表不同节点的range范围,灰色框代表我们期望删除的区域。
做删除时,从根节点开始,在每个节点处首先判断节点自身是否在灰色区域内,若是则标记删除;然后,判断两个子节点的range是否与删除区域有交叉,若无则直接剪枝,若有则重复上述过程;直至搜索完所有的子节点,完成所有被删除节点的标记删除。真正删除节点是需要等到这可树不平衡了重构时候才删除的
最近邻搜索的时间复杂度为Olog(n)

















 2701
2701

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









