








增量式(相对式)编码器与绝对式编码器工作原理
根据检测原理,编码器可分为光学式、磁式、感应式和电容式。根据其刻度方法及信号输出形式,可分为增量式、绝对式以及混合式三种。
增量式编码器工作原理
增量式旋转编码器通过内部两个光敏接受管转化其角度码盘的时序和相位关系,得到其角度码盘角度位移量增加(正方向)或减少(负方向)。在接合数字电路特别是单片机后,增量式旋转编码器在角度测量和角速度测量较绝对式旋转编码器更具有廉价和简易的优势。
下面对增量式旋转编码器的内部工作原理
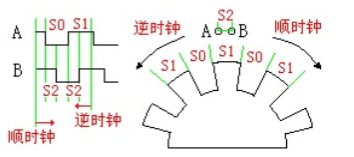
A,B两点对应两个光敏接受管, A,B两点间距为 S2 , 角度码盘的光栅间距分别为 S0和S1。当角度码盘以某个速度匀速转动时,那么可知输出波形图中的 S0:S1:S2比值与实际图的 S0:S1:S2比值相同。同理角度码盘以其他的速度匀速转动时,输出波形图中的 S0:S1:S2比值与实际图的 S0:S1:S2比值仍相同。如果角度码盘做变速运动,把它看成为多个运动周期(在下面定义)的组合,那么每个运动周期中输出波形图中的 S0:S1:S2比值与实际图的 S0:S1:S2比值仍相同。
通过输出波形图可知每个运动周期的时序为
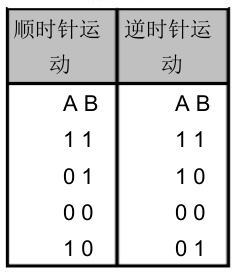
当前的 A,B输出值保存起来,与下一个 A,B输出值做比较,就可以轻易的得出角度码盘的运动方向,如果光栅格 S0等于S1时,也就是 S0和S1弧度夹角相同,且 S2等于S0的1/2 ,那么可得到此次角度码运动位移角度为 S0弧度夹角的 1/2 ,除以所消毫的时间,就得到此次角度码盘运动位移角速度。S0等于S1时,且S2等于S0的1/2 时,1/4 个运动周期就可以得到运动方向位和位移角度,如果 S0不等于S1,S2不等于S0的1/2 ,那么要 1个运动周期才可以得到运动方向位和位移角度了。我们常用的鼠标也是这个原理哦。
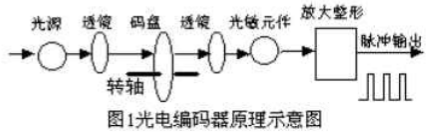
增量式编码器是直接利用光电转换原理输出三组方波脉冲 A、B和Z相;A、B两组脉冲相位差 90度,从可方便地判断出旋转方向,而 Z相为每转一个脉冲,用于基准点定位。它的优点是原理构造简单,机械平均寿命可在几万小时以上,抗干扰能力强,可靠性高,适合于长距离传输。其缺点是无法输出轴转动的绝对位置信息。
另外,三通道增量型旋转编码器每一圈产生一个称之为零位信号的脉冲(Z)
增量式编码器特点:
增量式编码器转轴旋转时,有相应的脉冲输出,其计数起点任意设定,可实现多圈无限累加和测量。编码器轴转一圈会输出固定的脉冲,脉冲数由编码器光栅的线数决定。需要提高分辩率时,可利用 90 度相位差的 A、B 两路信号进行倍频或更换高分辩率编码器。
绝对式编码器工作原理
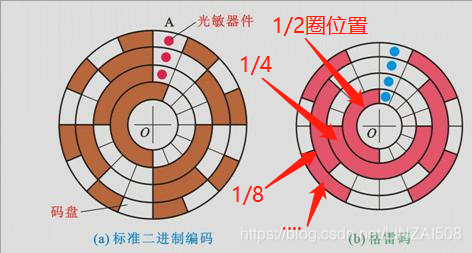
利用自然二进制或循环二进制(葛莱码)方式进行光电转换绝,绝对式编码器与增量式编码器不同之处在于圆盘上透光、不透光的线条图形,绝对编码器可有若干编码,根据读出码盘上的编码,检测绝对位置。编码的设计可采用二进制码、循环码、二进制补码通常为二进制码或 BCD码。从代码数大小的变化可以判别正反方向和位移所处的位置,绝对零位代码还可以用于停电位置记忆。绝对式编码器的测量范围常规为 0—360 度。
速度计与长度计一般采用增量式编码器,以下就其参数范围作简要的介绍,供选型参考。
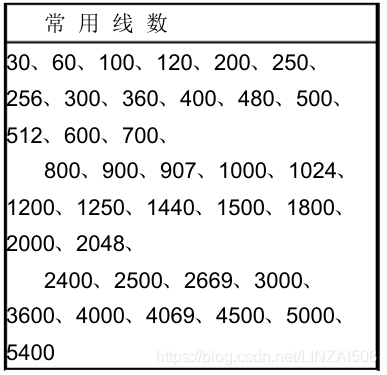
(1)光栅线数:
(2)输出方式:
常规有五种输出方式:
一、集电极开路输出(通用型)
二、互补输出
三、电压输出
四、长线驱动器输出
五、UVW 输出
(3)工作电压:常规有以下几种:
5V、12V、24V、5-24V(通用型)、 5-30V
(4)防护性能:常规为防油、防尘、抗震型。
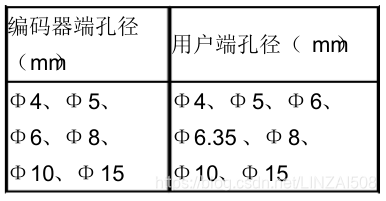
(5)弹性联接器:编码器轴与用户轴联接时,存在同轴误差,严重时将损坏编码器。要求采用弹性联接器(编码器厂家提供选件),解决偏心问题,一般可以做到允许扭矩 <1N.m, 不同轴度 <0.2mm,轴向偏角<1.5度。
弹性联轴器常用规格为:
绝对式编码器的特点是:
(1)可以直接读出角度坐标的绝对值;
(2)没有累积误差;
(3)电源切除后位置信息不会丢失。但是分辨率是由二进制的位数来决定的,也就是说精度取决于位数,目前有 10位、14位等多种。


















 4万+
4万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











