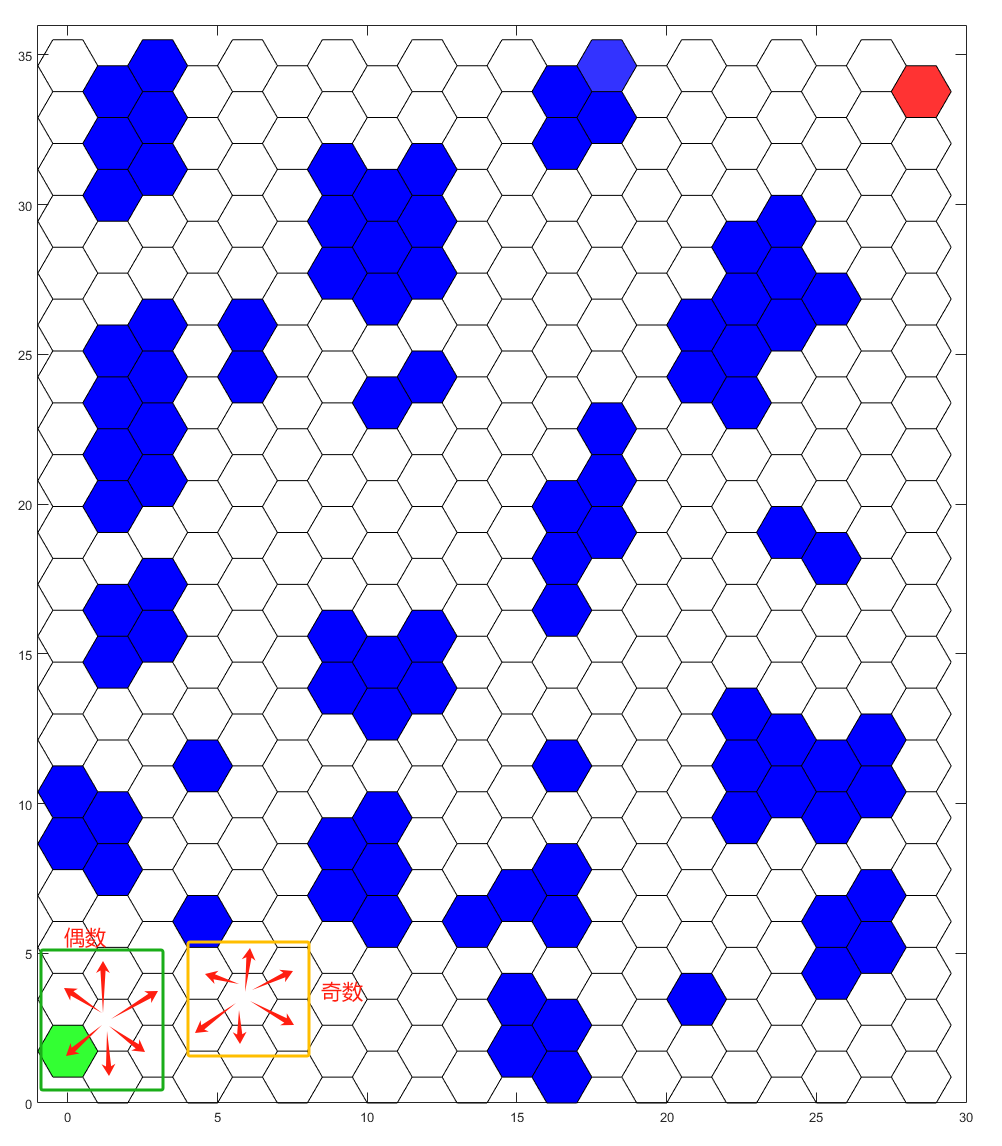
目录 1.算法原理2.结果展示3.参考文献4.代码获取 1.算法原理 精准导航:用A*算法优化栅格地图的路径规划【附Matlab代码】 六边形栅格地图 分析一下地图: 六边形栅格地图上移动可以看做6领域运动,偶数列与奇数列移动方式有所差异,将六边形栅格地图与二维栅格地图做映射可以发现: 偶数列移动方式:上、下、左、右、左下、右下奇数列移动方式:上、下、左、右、左上、右上 因此需要对基础A星算法进行改进,应用于六边形栅格地图。 2.结果展示 3.参考文献 [1] 陶哲,高跃飞,郑天江,等.基于A~*算法在蜂巢栅格地图中的路径规划研究[J].中北大学学报(自然科学版),2020,41(04):310-317. 4.代码获取




























 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



 2039
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
2039
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








