






今天我自己在网上学习了如何不说话也可以给视频配音。像什么电影解说配音,广播,读物什么的都可以。
盘点了博主们常用的文字转语音的工具,有网页,小程序,APP等
大家可以根据自己需求选择合适的
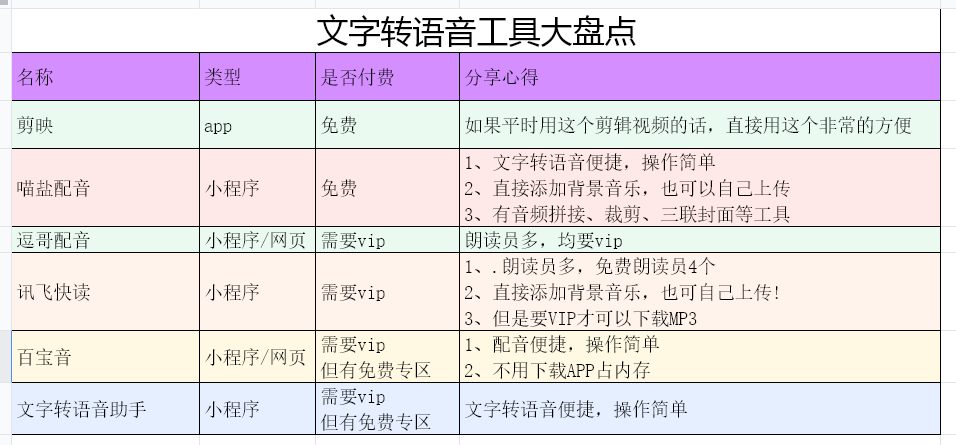
剪映
耳熟能详,免费的文本转语音,平时用这个剪辑的话,可以直接用文本朗读,但是主播较少,可选择性不高。

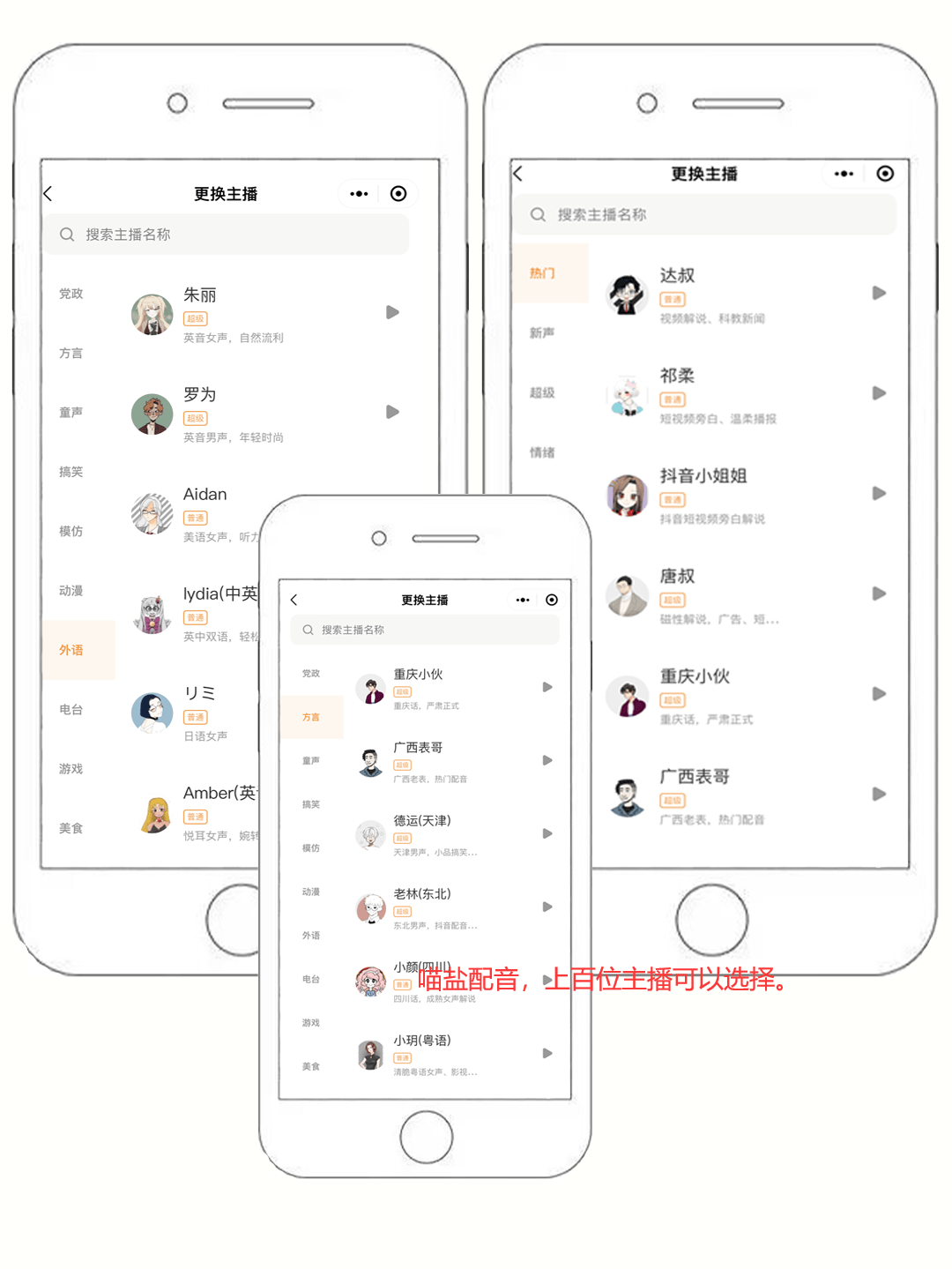
喵盐配音
douyin、kauishou、xigua短视频平台的百万博主用的声音都可以在这里找到,而且这个是免费的软件,之前没发现过,最近才有,可能是由于新上架,想要赚一波人气,大家可以撸一把羊毛。
逗哥配音
朗读员很多,均要vip。

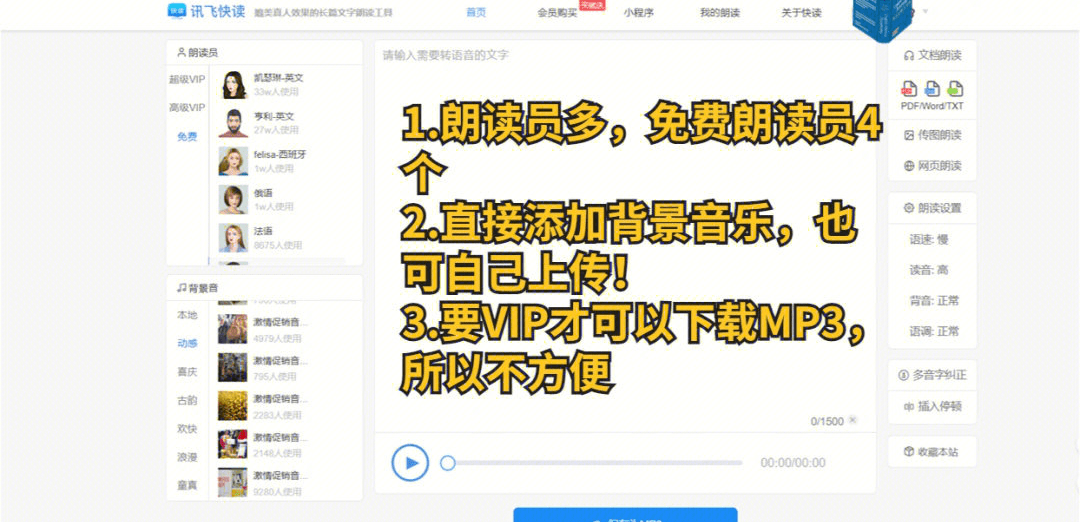
讯飞快读
1、朗读员多,免费朗读员4个
2、直接添加背景音乐,也可自己上传!
3、但是要VIP才可以下载MP3
百宝音
1.配音便捷,操作简单
2. 不用下载APP占内存
3. 需vip,但有免费专区

文字转语音助手
文字转语音便捷,制作简单,虽然要vip,但有五个免费主播可以使用。

有需要的大家可以收藏一波,等之后使用。

















 1130
1130

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









