







链接:http://blog.csdn.net/heyijia0327/article/details/41654963
在实际应用中,我们可能想发布自己的消息类型,就像众所周知的Twist类型或者航向信息Odometry一样,那么到底如何定制自己想要的消息类型?本文楼主以自己调试过程中监控机器人左右轮速度来进行演示。
文章内容包括:消息的定制和使用,以及使用rqt_plot来绘制曲线,建议大家先阅读官网教程,一些细节事项也可参见这个自定义消息msg。
首先在你的package创建msg文件夹,然后新建一个空白文档,命名为Num.msg,将下面的左右轮速度复制进去,保存。当然你可以按照官网方式在终端里输入指令来执行上的流程。
这里我定义来一个左右轮速度的如下:
如果你想定义为数组类型的,如下:
注意这里的数组使用的是无长度限制的,也就是方扩号内没有东西。在使用的时候,不能够直接用数组赋值那样去做,它实际上是一个向量,往里面填充数据应使用c++中vector的push_back、resize之类的函数。详细内容可参看该ros answer,该例程使用push_back填充数据.也可以参见官方教程中laserscan的发布,laserscan消息中的ranges就是这样一个向量,在程序中laserscan是使用的resize先设定容器大小,再往里填充数据的.
36 scan.ranges.resize(num_readings);//使用resize设定激光点的多少
37 scan.intensities.resize(num_readings);
38 for(unsigned int i = 0; i < num_readings; ++i){
39 scan.ranges[i] = ranges[i]; //再往里面填数据
40 scan.intensities[i] = intensities[i];
41 }
定义完以后,注意在package.xml文件里添加:
如果你之前创建过消息已经有了上面两句就不用再添加了。
然后在 CMakeLists.txt文件的find_packag里添加一些必要的语句,这个参见前面提到的官网教程。
最主要的是在add_message_files里添加上你自定义的消息。
如果都完成以后,新开一个终端,输入一下指令,编译一下:
在程序中首先使用下面的语句引进该消息msg类型
在程序中使用自己已经定义的消息:
car_speed = Num() #注意 消息的使用car_speed.leftspeed = a car_speed.rightspeed = b
这里贴一个自己的完整程序在下面,这个程序里包含了Lz自己写的串口模块,这里贴出来只是让大家知道怎么调用自定义的msg。
程序如下:
注意每次新建的py文件都要使用在新的终端中,用下面的命令使程序可执行。
运行roscore以后,再开一个新的终端,运行:
然后再在一个新的终端中,运行:
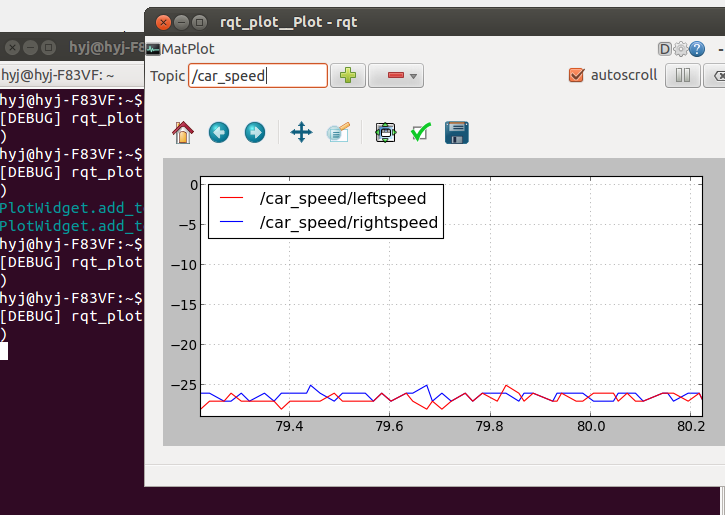
输入我们的topic,就可一使用rqt_plot绘制曲线了。















 3346
3346

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









