







之前讲到了如何用ceres做相邻两帧的ba优化,是用重投影误差来做的,对于连续的数据流,无论你在前端采用什么样的代数算法pnp或者icp其实都只能算出一个粗略的解,博主亲自做实验来比较代数解和非线性优化解的区别,发现无论怎样,即使我ba给的初值相当垃圾,优化出来的结果一样好于代数解。那么对于长时间的slam问题来说,如何保证可以减少随时间产生的累计误差,一种主流的做法是把我所以看到的关键帧中的mappoint找出来,来和我的观测到的像素坐标做一个重投影误差,那么这就构建了一个关于如何求解误差梯度的问题了,所幸研究者发现至少在slam问题中,其hessian矩阵具有稀疏性。我们在这里比较简单的说明一下。
我们假设在第i个位姿上看到了第j个mappoint,那么这个单个误差项对于整个误差函数到底有多大的贡献?我们记对于此时的单个重投影误差为fij,可以知道,此时误差项是二维的,而变量是几维呢,我们这里不考虑旋转矩阵要用李代数来表示,不然讲解会变得很麻烦,而且我们不打算用g2o,所以在ceres里,李代数还是很好处理的,只要用罗德里格斯公式转换一下便可以了,再交给ceres自动求导呗。所以简单来说,如果我们同时想要优化位姿和mappoint,我们可以看成是2维的,注意,这个说法很不准确,但是博主为了方便理解,简单可以看成第ij项的误差雅克比为误差对位姿i的李代数偏导,和误差对路标j的偏导,很容易发现其中的稀疏性,那就是我的整体雅克比维数是位姿总和n+路标总和m,那么再第i项和j项分别有这么一个贡献。
那么如何用ceres求解?其实很简单,残差我们还是按照老样子定义,只不过再初始化参数时,要初始化所以变量,及所以路标和位姿,那么对于每一个误差项,我们通过指针的索引来制定要优化的位姿和路标点在放入addresidualblocks里面。
废话不多说,来看代码吧,提示,由于我在做后端优化时使用的别人的数据集,所以我没有写一个完整的多线程的slam,其实是我根本不会多线程。。。。我把localba的数据拿出来在放入globalba里面的,看上去有些笨拙,但是对于我这样的入门来说来说可以接受的。
#include<iostream>
#include<fstream>
#include<stdio.h>
#include<opencv2/core/core.hpp>
#include<opencv2/highgui/highgui.hpp>
#include<opencv2/imgproc/imgproc.hpp>
#include<opencv2/opencv.hpp>
#include<Eigen/Geometry>
#include<Eigen/Core>
#include<Eigen/SVD>
#include<pcl/point_types.h>
#include<pcl/io/pcd_io.h>
#include<pcl/visualization/pcl_visualizer.h>
#include <pcl/visualization/cloud_viewer.h>
#include <pcl/filters/statistical_outlier_removal.h>
#include <pcl/filters/voxel_grid.h>
#include <octomap/octomap.h>
#include <octomap/ColorOcTree.h>
#include<ceres/ceres.h>
#include<ceres/rotation.h>
#include <boost/concept_check.hpp>
using namespace std;
using namespace cv;
struct cost_function_define
{
//构造函数初始化并传入参数
cost_function_define(Point3d p1,Point2d p2):_p1(p1),_p2(p2){}
template<typename T>
bool operator()(const T* const cere_r,T* residual)const
{
//将空间点转为类型T,可以调用旋转函数转化
T p_1[3];
T p_2[3];
p_1[0]=T(_p1.x);
p_1[1]=T(_p1.y);
p_1[2]=T(_p1.z);
//调用选择矩阵,将一图的空间点映射到第二图
ceres::AngleAxisRotatePoint(cere_r,p_1,p_2);
//将空间点变为像素坐标
p_2[0]=p_2[0]+cere_r[3];
p_2[1]=p_2[1]+cere_r[4];
p_2[2]=p_2[2]+cere_r[5];
const T x=p_2[0]/p_2[2];
const T y=p_2[1]/p_2[2];
const T u=x*518.0+325.5;
const T v=y*519.0+253.5;
//求出第二图的像素坐标
const T u1=T(_p2.x);
const T v1=T(_p2.y);
//定义残差
residual[0]=u-u1;
residual[1]=v-v1;
return true;
}
Point3d _p1;
Point2d _p2;
};
int main()
{
Point2d transform(const Point2d& p,const Mat& K);
void writefile(const Mat& mat,const char* filename);
Mat K=(Mat_<double>(3,3)<<518.0,0,325.5,0,519.0,253.5,0,0,1);
//存放照片编号
vector<int>number;
//存放照片顺序
vector<int>queue;
ifstream fin("./number.txt");
for(int i=0;i<32;i++)
{
int a=0;
fin>>a;
number.push_back(a);
queue.push_back(i);
}
ifstream fin_1("./data.txt");
vector<Mat>poses;
for(int i=0;i<32;i++)
{
double data[12]={0};
fin_1>>data[0]>>data[1]>>data[2]>>data[3]>>data[4]>>data[5]>>data[6]>>data[7]>>data[8]>>data[9]>>data[10]>>data[11];
Mat currentpose=(Mat_<double>(3,4)<<data[0],data[1],data[2],data[3],data[4],data[5],data[6],data[7],data[8],data[9],data[10],data[11]);
poses.push_back(currentpose);
}
//分别存放三维坐标和像素坐标和照片对应顺序
vector<Point3d> loaclopt;
vector<Point2d> localnum;
vector<int> localqueue;
for(int i=0;i<31;i++)
for(int j=i+1;j<32;j++)
{
char last_c[30];
char color[30];
char last_d[30];
char depth[30];
sprintf(last_c,"%s%d%s","./rgb_png/",number[i],".png");
sprintf(color,"%s%d%s","./rgb_png/",number[j],".png");
sprintf(last_d,"%s%d%s","./depth_png/",number[i],".png");
sprintf(depth,"%s%d%s","./depth_png/",number[j],".png");
Mat last_co=imread(last_c);
Mat colornow=imread(color);
Mat last_dep=imread(last_d,-1);
vector<KeyPoint> keypoints1,keypoints2;
Ptr<FeatureDetector> detector=ORB::create();
detector->detect(last_co,keypoints1);
detector->detect(colornow,keypoints2);
Mat descriptor1,descriptor2;
Ptr<DescriptorExtractor> descriptor=ORB::create();
descriptor->compute(last_co,keypoints1,descriptor1);
descriptor->compute(colornow,keypoints2,descriptor2);
vector<DMatch> matches;
Ptr<DescriptorMatcher> matcher=DescriptorMatcher::create("BruteForce-Hamming");
matcher->match(descriptor1,descriptor2,matches);
double mindis=1000;
for(int k=0;k<matches.size();k++)
{
if(matches[k].distance<mindis)
{
mindis=matches[k].distance;
}
}
vector<DMatch> goodmatch;
for(int k=0;k<matches.size();k++)
{
if(matches[k].distance<=min(4*mindis,20.0))
{
goodmatch.push_back(matches[k]);
}
}
for(int k=0;k<goodmatch.size();k++)
{
Point2d pixel1=keypoints1[goodmatch[k].queryIdx].pt;
Point2d pixel2=keypoints2[goodmatch[k].trainIdx].pt;
Point2d pixel_cam1=transform(pixel1,K);
ushort d=last_dep.ptr<unsigned short>(int(pixel1.y))[int(pixel1.x)];
if(d==0)
{
continue;
}
localnum.push_back(pixel2);
localqueue.push_back(queue[j]);
Point3d camera_3d=Point3d(pixel_cam1.x*double(d)/1000.0,pixel_cam1.y*double(d)/1000.0,double(d)/1000.0);
Mat worldpoint=(Mat_<double>(3,3)<<poses[i].at<double>(0,0),poses[i].at<double>(0,1),poses[i].at<double>(0,2),
poses[i].at<double>(1,0),poses[i].at<double>(1,1),poses[i].at<double>(1,2),
poses[i].at<double>(2,0),poses[i].at<double>(2,1),poses[i].at<double>(2,2)
)*(Mat_<double>(3,1)<<camera_3d.x,camera_3d.y,camera_3d.z)+(Mat_<double>(3,1)<<poses[i].at<double>(0,3),poses[i].at<double>(1,3),poses[i].at<double>(2,3));
Point3d world_3d=Point3d(worldpoint.at<double>(0,0),worldpoint.at<double>(1,0),worldpoint.at<double>(2,0));
loaclopt.push_back(world_3d);
}
}
cout<<"共有观测点"<<loaclopt.size()<<endl;
vector<double> lastdata;
for(int i=1;i<32;i++)
{
Mat reserve=(Mat_<double>(3,3)<<poses[i].at<double>(0,0),poses[i].at<double>(1,0),poses[i].at<double>(2,0),
poses[i].at<double>(0,1),poses[i].at<double>(1,1),poses[i].at<double>(2,1),
poses[i].at<double>(0,2),poses[i].at<double>(1,2),poses[i].at<double>(2,2));
Mat reserve_t=-reserve*(Mat_<double>(3,1)<<poses[i].at<double>(0,3),poses[i].at<double>(1,3),poses[i].at<double>(2,3));
Mat res;
Rodrigues(reserve,res);
for(int j=0;j<3;j++)
{
lastdata.push_back(res.at<double>(j,0));
}
for(int j=0;j<3;j++)
{
lastdata.push_back(reserve_t.at<double>(j,0));
}
}
double dataest[186]={0};
for(int i=0;i<186;i++)
{
dataest[i]=lastdata[i];
}
double* camera=dataest;
//定义求解问题
ceres::Problem problem;
for(int i=0;i<localnum.size();i++)
{
//残差的维度,变量的维度,使用自动求导,定义一个求解残差的构造函数
ceres::CostFunction* costfunction=new ceres::AutoDiffCostFunction<cost_function_define,2,6>(new cost_function_define(loaclopt[i],localnum[i]));
ceres::LossFunction* lossfunction=new ceres::HuberLoss(1.0);
//添加每一次观测的残差
double* cere_r=camera+6*(localqueue[i]-1);
problem.AddResidualBlock(costfunction,lossfunction,cere_r);
}
//配置求解器
ceres::Solver::Options option;
//选择迭代方式
option.linear_solver_type=ceres::SPARSE_SCHUR;
//输出迭代信息到屏幕
option.minimizer_progress_to_stdout=true;
//显示优化信息
ceres::Solver::Summary summary;
//开始求解
ceres::Solve(option,&problem,&summary);
//显示优化信息
cout<<summary.BriefReport()<<endl;
Mat worldaxis=(Mat_<double>(3,4)<<1,0,0,0,0,1,0,0,0,0,1,0);
writefile(worldaxis,"./local.txt");
for(int i=0;i<31;i++)
{
//将转角和位移变成变化矩阵并存入
Mat initial_r=(Mat_<double>(3,1)<<camera[6*i],camera[6*i+1],camera[6*i+2]);
Mat initial_R;
Rodrigues(initial_r,initial_R);
Mat initial_t=(Mat_<double>(3,1)<<camera[6*i+3],camera[6*i+4],camera[6*i+5]);
Mat final_R=initial_R.t();
Mat final_t=-final_R*initial_t;
Mat combine=(Mat_<double>(3,4)<<final_R.at<double>(0,0),final_R.at<double>(0,1),final_R.at<double>(0,2),final_t.at<double>(0,0),
final_R.at<double>(1,0),final_R.at<double>(1,1),final_R.at<double>(1,2),final_t.at<double>(1,0),
final_R.at<double>(2,0),final_R.at<double>(2,1),final_R.at<double>(2,2),final_t.at<double>(2,0));
writefile(combine,"./local.txt");
}
//写数据到点云
ifstream fin_2("./local.txt");
vector<Mat>pose;
for(int i=0;i<32;i++)
{
double data[12]={0};
fin_2>>data[0]>>data[1]>>data[2]>>data[3]>>data[4]>>data[5]>>data[6]>>data[7]>>data[8]>>data[9]>>data[10]>>data[11];
Mat currentpose=(Mat_<double>(3,4)<<data[0],data[1],data[2],data[3],data[4],data[5],data[6],data[7],data[8],data[9],data[10],data[11]);
pose.push_back(currentpose);
}
cout<<"正在存放点云"<<endl;
//定义点云指针存放关键帧的点云
pcl::PointCloud<pcl::PointXYZRGB>::Ptr pointcloud(new pcl::PointCloud<pcl::PointXYZRGB>);
for(int i=0;i<32;i++)
{
//创建点云,用于统计滤波
//pcl::PointCloud<pcl::PointXYZRGB>::Ptr currentpoint(new pcl::PointCloud<pcl::PointXYZRGB>);
char colorname[30];
char depthname[30];
sprintf(colorname,"%s%d%s","./rgb_png/",number[i],".png");
sprintf(depthname,"%s%d%s","./depth_png/",number[i],".png");
//存放关键帧
Mat keyframe,depthkeyframe;
keyframe=imread(colorname);
depthkeyframe=imread(depthname,-1);
for(int v=0;v<keyframe.rows;v++)
for(int u=0;u<keyframe.cols;u++)
{
ushort d=depthkeyframe.ptr<unsigned short>(v)[u];
if(d==0||d>7000.0||d<400.0)
{
continue;
}
//还原三维点
Point3d camera_point;
camera_point.z=double(d)/1000.0;
camera_point.x=(u-K.at<double>(0,2))/K.at<double>(0,0)*camera_point.z;
camera_point.y=(v-K.at<double>(1,2))/K.at<double>(1,1)*camera_point.z;
Mat worldpoint=(Mat_<double>(3,3)<<pose[i].at<double>(0,0),pose[i].at<double>(0,1),pose[i].at<double>(0,2),
pose[i].at<double>(1,0),pose[i].at<double>(1,1),pose[i].at<double>(1,2),
pose[i].at<double>(2,0),pose[i].at<double>(2,1),pose[i].at<double>(2,2)
)*(Mat_<double>(3,1)<<camera_point.x,camera_point.y,camera_point.z)+(Mat_<double>(3,1)<<pose[i].at<double>(0,3),pose[i].at<double>(1,3),pose[i].at<double>(2,3));
pcl::PointXYZRGB p_3d;
p_3d.x=worldpoint.at<double>(0,0);
p_3d.y=worldpoint.at<double>(1,0);
p_3d.z=worldpoint.at<double>(2,0);
p_3d.b=keyframe.data[v*keyframe.step+u*keyframe.channels()];
p_3d.g=keyframe.data[v*keyframe.step+u*keyframe.channels()+1];
p_3d.r=keyframe.data[v*keyframe.step+u*keyframe.channels()+2];
pointcloud->points.push_back(p_3d);
}
//统计滤波
// pcl::PointCloud<pcl::PointXYZRGB>::Ptr tem(new pcl::PointCloud<pcl::PointXYZRGB>);
// pcl::StatisticalOutlierRemoval<pcl::PointXYZRGB> statistical_filter;
//设置聚类,阀值
// statistical_filter.setMeanK(50);
// statistical_filter.setStddevMulThresh(1.0);
// statistical_filter.setInputCloud(currentpoint);
// statistical_filter.filter(*tem);
// (*pointcloud)+=*tem;
}
cout<<"点云读取完成"<<endl;
pointcloud->is_dense=false;
cout<<pointcloud->size()<<endl;
//体素滤波
pcl::VoxelGrid<pcl::PointXYZRGB> voxel_filter;
//设置最小方格
voxel_filter.setLeafSize(0.01,0.01,0.01);
//定义一个点云指针用于保存滤波后的点
pcl::PointCloud<pcl::PointXYZRGB>::Ptr tempoint(new pcl::PointCloud<pcl::PointXYZRGB>);
voxel_filter.setInputCloud(pointcloud);
//滤波
voxel_filter.filter(*tempoint);
tempoint->swap(*pointcloud);
cout<<pointcloud->size()<<endl;
//保存
pcl::io::savePCDFileBinary("globalmap.pcd",*pointcloud);
return 0;
}
Point2d transform(const Point2d& p,const Mat& K)
{
return Point2d(
(p.x-K.at<double>(0,2))/K.at<double>(0,0),
(p.y-K.at<double>(1,2))/K.at<double>(1,1)
);
}
//将位置写入txt便于读取
void writefile(const Mat& mat,const char* filename)
{
ofstream fout(filename,ios_base::app);
for(int i=0;i<mat.rows;i++)
{
for(int k=0;k<mat.cols;k++)
{
fout<<mat.at<double>(i,k)<<" ";
}
fout<<endl;
}
fout.close();
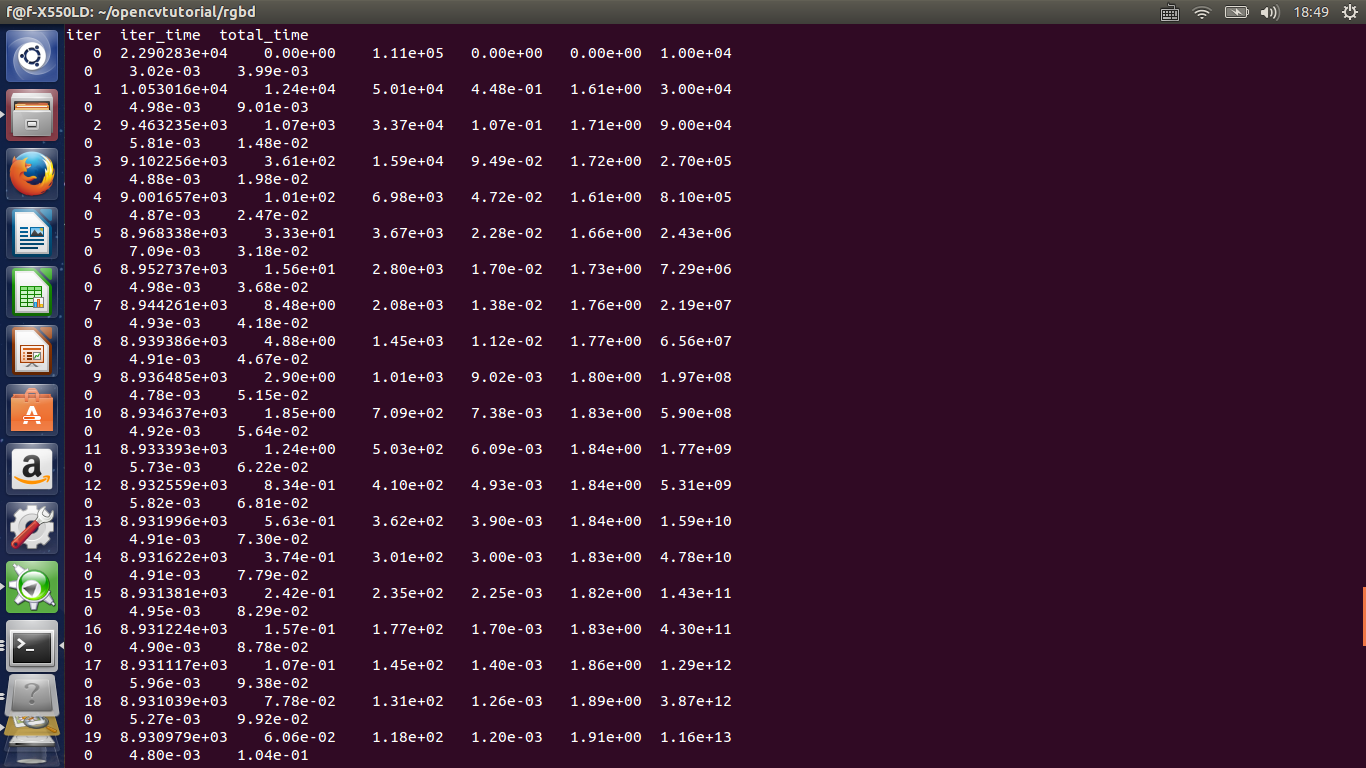
}来看一下结果把,误差还是缩小了一些的
总结:这个程序没有把mappoint考虑进来优化,所以结果一定不是最优解,但是由于博主是想用rgbd做稠密地图所以没有优化路标,接下来博主将会继续探索如何更好的做好后端的ba。















 2440
2440











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









