








2024.12.4更新:
之前0.0.2版本的包存在依赖库的问题,0.0.3修复了此问题,大家可以直接去gitee官网去下载最新发行版安装即可。
0.前言
之前做项目的过程中,有需要控制UR5实机机械臂的需求,那时是通过ROS去控制UR5实机的。最近在github上找到一个名为"URBasic"的python项目:
项目地址:
其利用的是DashBoard Sever去进行控制的,并且该项目的作者已经把各种功能封装好了,我们只需要调用即可。
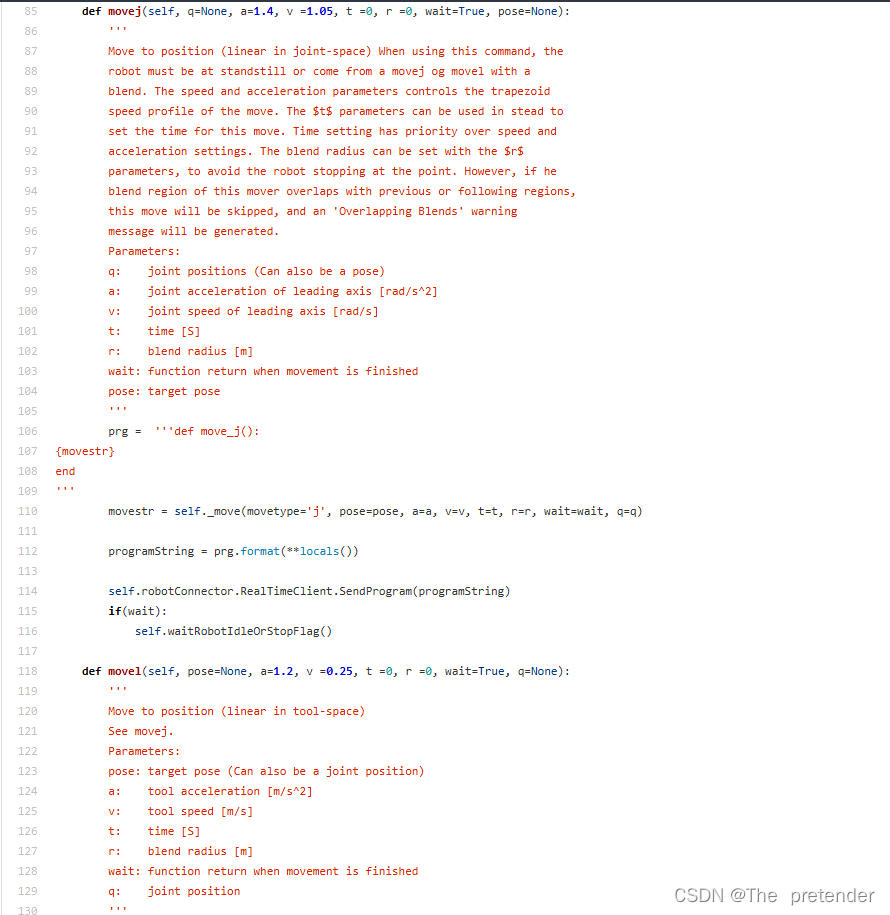
但在使用过程中我发现我每次都要把这个项目代码copy一遍放入自己的项目里,项目一多就很麻烦,还有我发现该项目的代码结构是存在一些问题的。
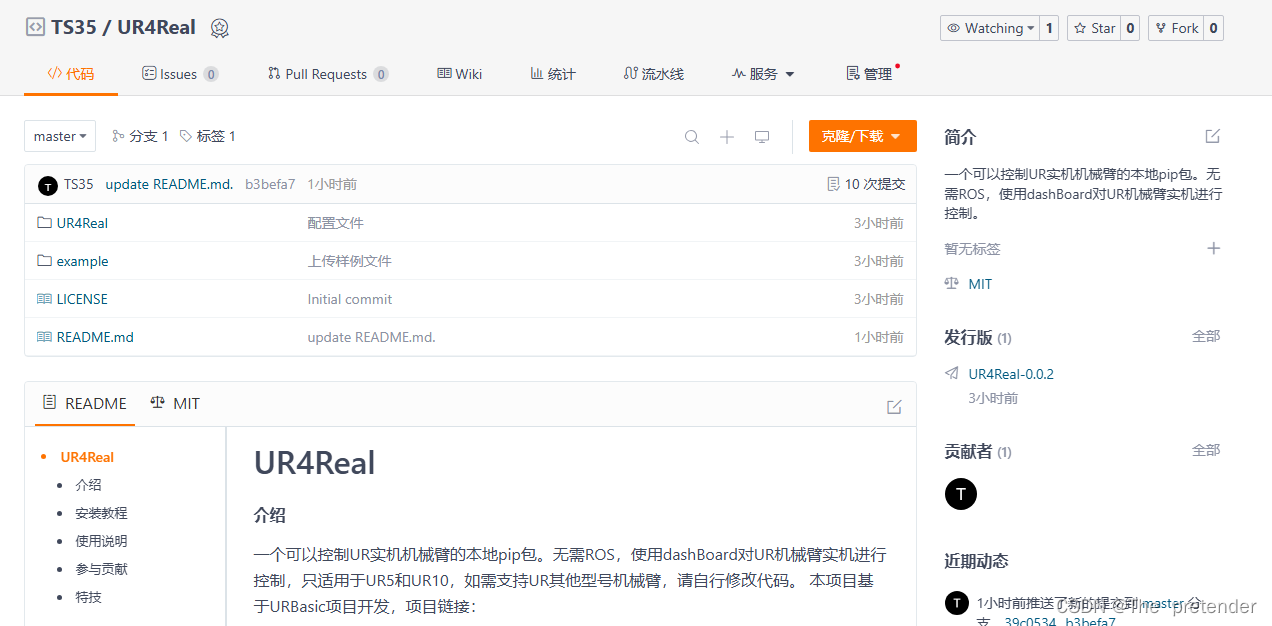
于是,我对原作者的代码进行了修改,并将它封装成了一个pip包,通过 pip install 命令可以直接将这个包安装到python环境中,省去了重复复制代码的麻烦事。
1. 安装教程
修改后的代码仓库:
方式1.自己创建pip包然后安装
1.我将修改后的代码放到了gitee上,你可以从仓库下载源码,
git clone https://gitee.com/ts35/ur4-real.git然后在项目同级目录创建 setup.py 文件,内容参考:
from setuptools import setup, find_packages
setup(
name="UR4Real", # 包名称
version="0.0.3", # 版本号
description="A control library for UR robots", # 简短描述
author="xxx", # 作者名
license="MIT License", # 许可证
# 自动发现所有的 Python 包,包括本地包如 `conf`
packages=find_packages(),
# 包含额外的非 Python 文件
include_package_data=True,
package_data={
"": ["*.xml"], # 包括所有包中匹配的 XML 文件
},
# 安装依赖 (不包含本地包 `conf`)
install_requires=[
"numpy",
"ikpy",
"sympy",
"scipy",
],
)2.然后在当前项目目录下执行 python setup.py sdist,生成tar.gz文件 或 执行python setup.py bdist_wheel,生成whl文件,生成的文件均在 dist 文件夹中。

3.使用命令pip install ur4real-0.0.3.tar.gz 或 UR4Real-0.0.3-py3-none-any.whl 即可安装
方式2.使用打包好的pip包直接安装
1.下载提供的安装包 ur4real-0.0.3.tar.gz 或 UR4Real-0.0.3-py3-none-any.whl,然后直接使用 pip install ur4real-0.0.3.tar.gz 或 pip install UR4Real-0.0.3-py3-none-any.whl即可。
或者你也可以从CSDN下载:


2.使用说明
注:该包只适用于UR5和UR10,如需支持UR其他型号机械臂,请自行修改代码,需要修改的代码主要在 kinematic.py 中
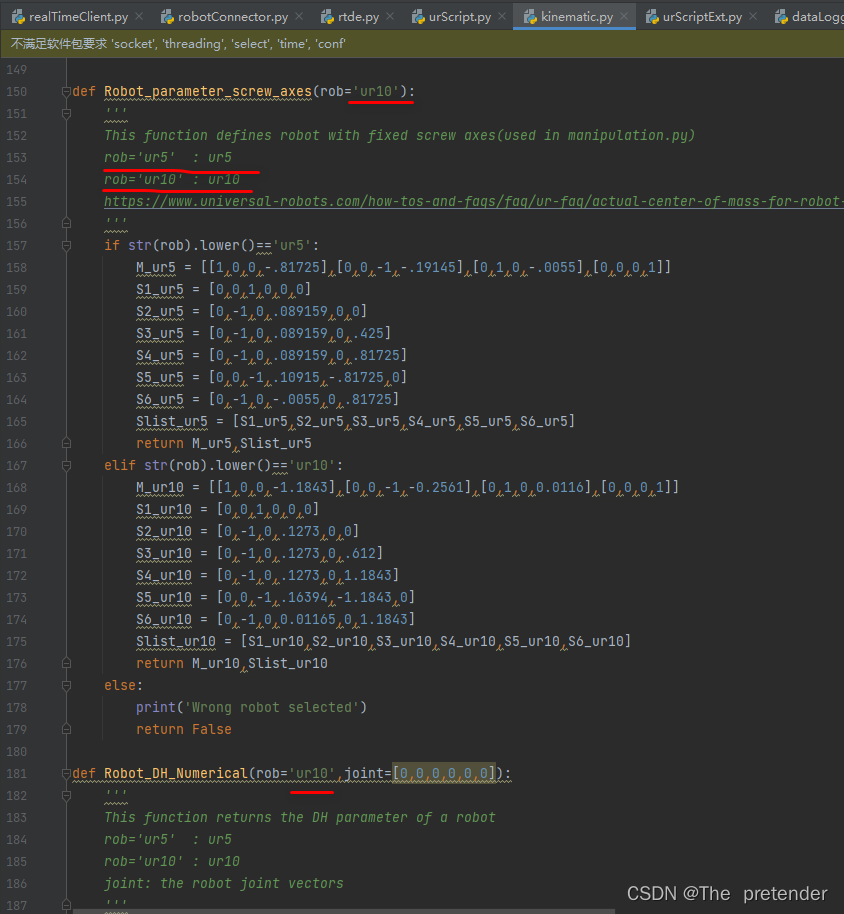
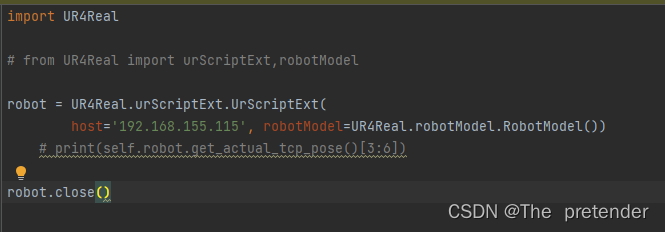
机械臂实例化参考/example/UR_test.py,其他的函数和使用方法都注释在代码里,主要是在urScript.py中
控制步骤
1.启动真实UR机械臂,使用 示教器 -> 设置机器人 -> 网络 ->查看真实机械臂的ip地址



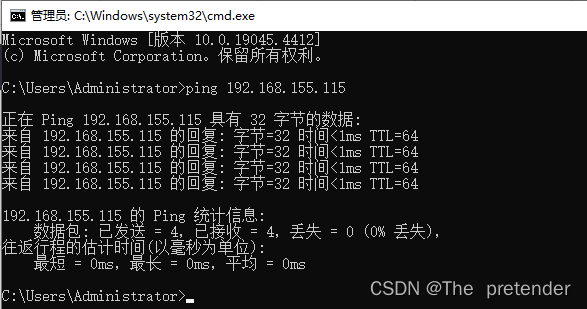
这里示例的UR5实机的地址为192.168.155.115
2.在控制端(就是你的电脑)上,尝试ping UR机械臂实机,检查连接是否正常
3.安装UR4Real包
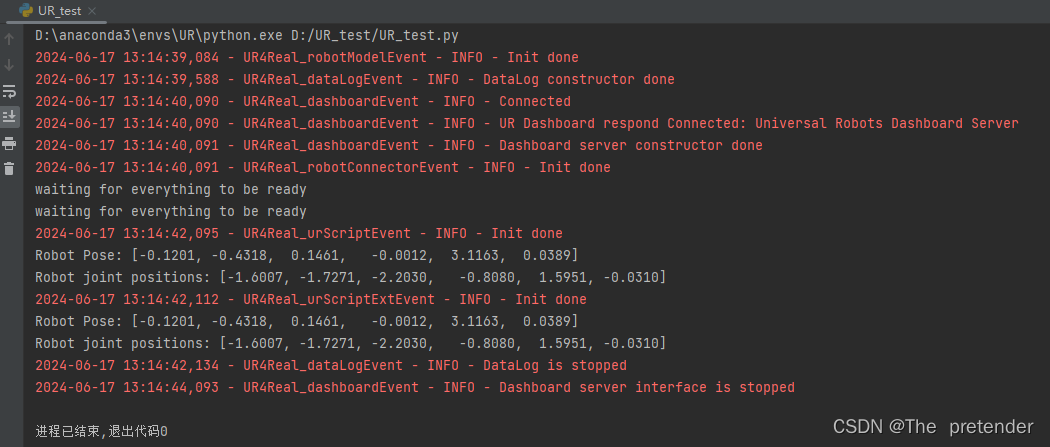
4.运行/example下的UR_test.py,若打印如下信息则表示连接成功。


















 3366
3366

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









