









XTDrone目前支持多旋翼飞行器(multirotor)、固定翼飞行器(plane)、可垂直起降固定翼飞行器(vtol)以及车辆(rover)四个大类机型,multirotor下有iris、solo和typhoon_h480三个机型,vtol下有tailsitter、quadplane(模型叫standard_vtol)和tiltrotor三个机型,plane和rover没有下属机型。
仿真平台基础配置具体资料参考:XTDrone使用文档
配置方法
以PX4_Firmware/launch文件中outdoor3.launch 为例
 这里有4处solo,就是我们选择的无人机机型,可以自己修改。
这里有4处solo,就是我们选择的无人机机型,可以自己修改。
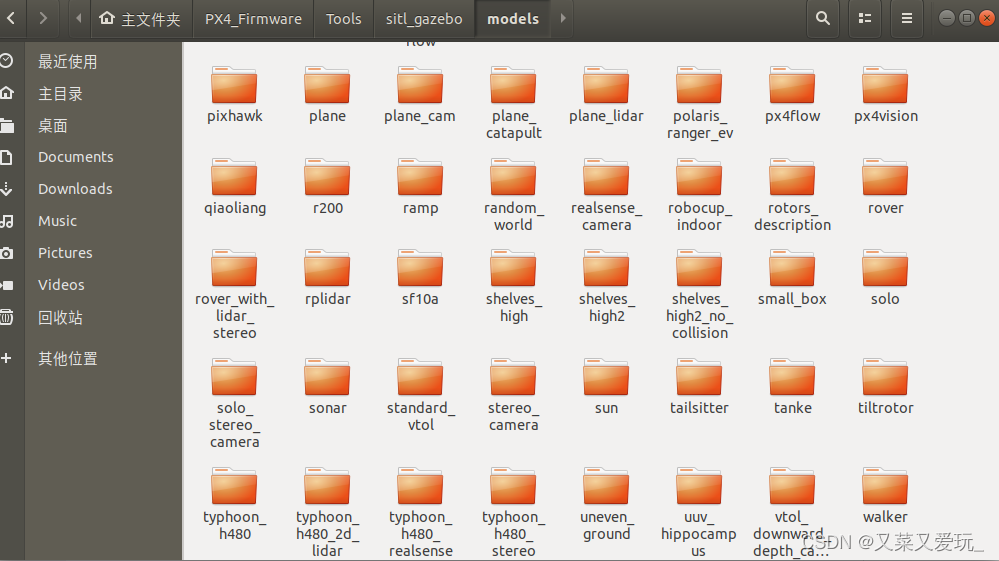
solo_stereo_camera处的修改特别注意sdf文件,由于同一种机型可能配备不同的传感器,所以sdf文件的命名会随之不同,需要在~/PX4_Firmware/Tools/sitl_gazebo/models/文件夹下寻找所需的sdf文件。
打开一个终端,启动仿真程序:
cd ~/PX4_Firmware/launch/
gedit outdoor3.launch
Gazebo界面中就出现了一个四旋翼,可以尝试其他机型;

控制方法
打开一个新的终端,启动通信脚本,solo代表子机型,0代表飞机的编号:
cd ~/XTDrone/communication
python multirotor_communication.py solo 0
再启动键盘控制脚本,solo代表子机型,1代表飞机的个数,vel代表速度控制。虽然多旋翼飞行器提供了速度控制和加速度控制两种键盘控制方式,但手动控制速度比较方便,加速度控制在后面的高级运动规划任务中比较有用。
cd ~/XTDrone/control/keyboard
python multirotor_keyboard_control.py solo 1 vel
 打开了键盘控制并且建立了通信;
打开了键盘控制并且建立了通信;
按照键盘终端窗口的提示,对四旋翼进行控制;
对于多旋翼飞行器,Offboard控制起飞很容易,给一个大于0.3m/s的期望z向速度即可,
不断按i把期望z向速度加到0.3m/s以上,然后按b切到offboard模式,再按t解锁即可起飞,飞到合适的高度后,按s即可实现悬停。


















 701
701











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











