






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
基于扩展卡尔曼滤波(EKF)的四旋翼无人机姿态估计是一种常用的技术,用于推断无人机在空间中的姿态(即俯仰、横滚和偏航角度)。该方法结合了惯性测量单元(IMU)和其他传感器的数据,例如陀螺仪和加速度计,以及可能的外部信息,如磁力计或视觉信息,以提高姿态估计的准确性和稳定性。在这种方法中,IMU提供了关于无人机的角速度和加速度的测量值,但由于积分误差和传感器噪声,单独使用IMU可能会导致姿态估计的漂移。为了解决这个问题,EKF结合了IMU的测量值和四旋翼动力学模型,以及其他传感器提供的信息,通过状态估计和卡尔曼滤波技术,来不断地校正和更新对无人机姿态的估计。具体来说,EKF首先根据四旋翼动力学模型预测下一个时刻的姿态状态,并将这个预测值与来自IMU的实际测量进行比较。然后,根据测量与模型之间的残差,以及预测姿态的不确定性,EKF通过卡尔曼滤波算法计算出对姿态的最优估计,并更新估计的不确定性。通过持续地整合IMU数据和其他传感器的信息,并使用EKF来进行状态估计和滤波,可以实现对四旋翼无人机姿态的高精度和稳定的实时估计,从而为飞行控制和导航提供了可靠的基础。
📚2 运行结果
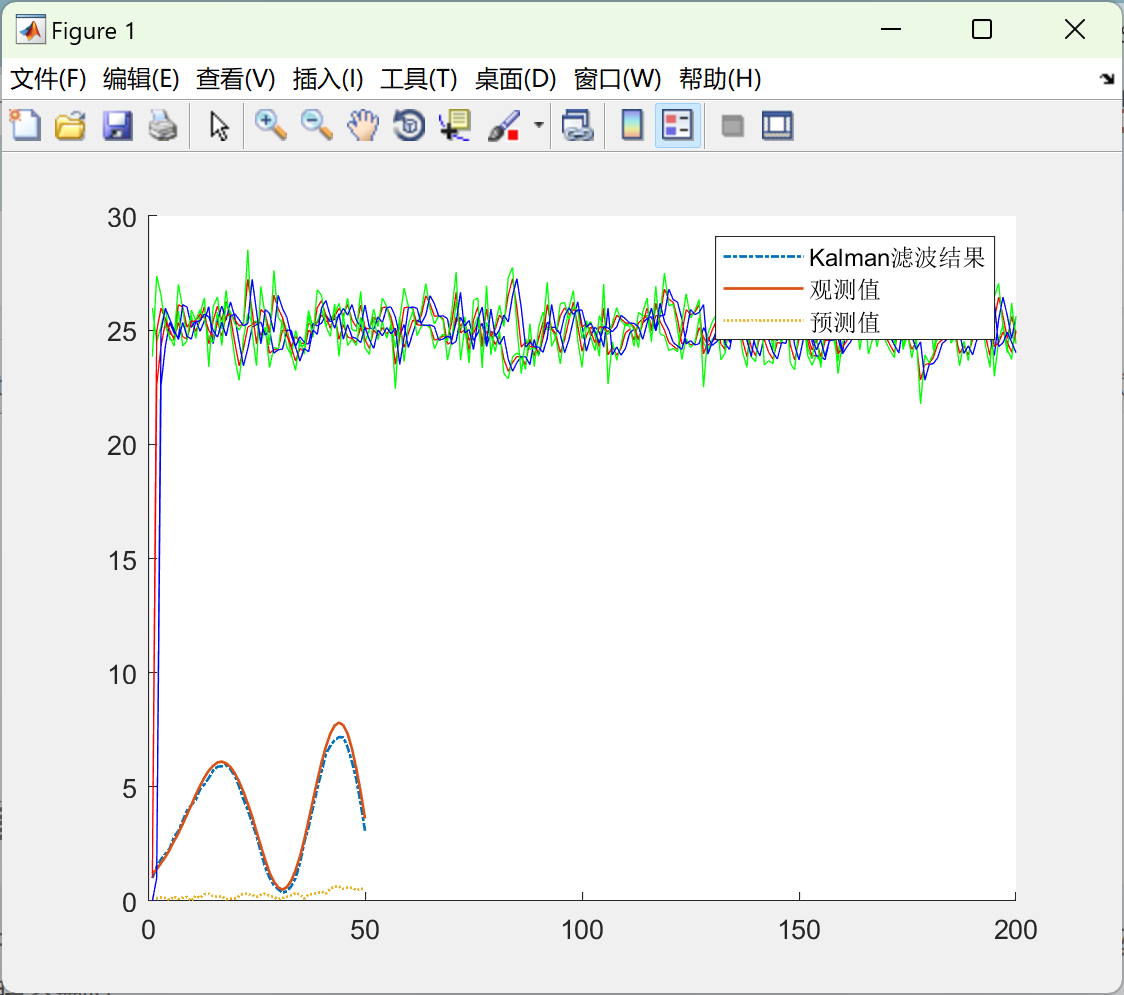
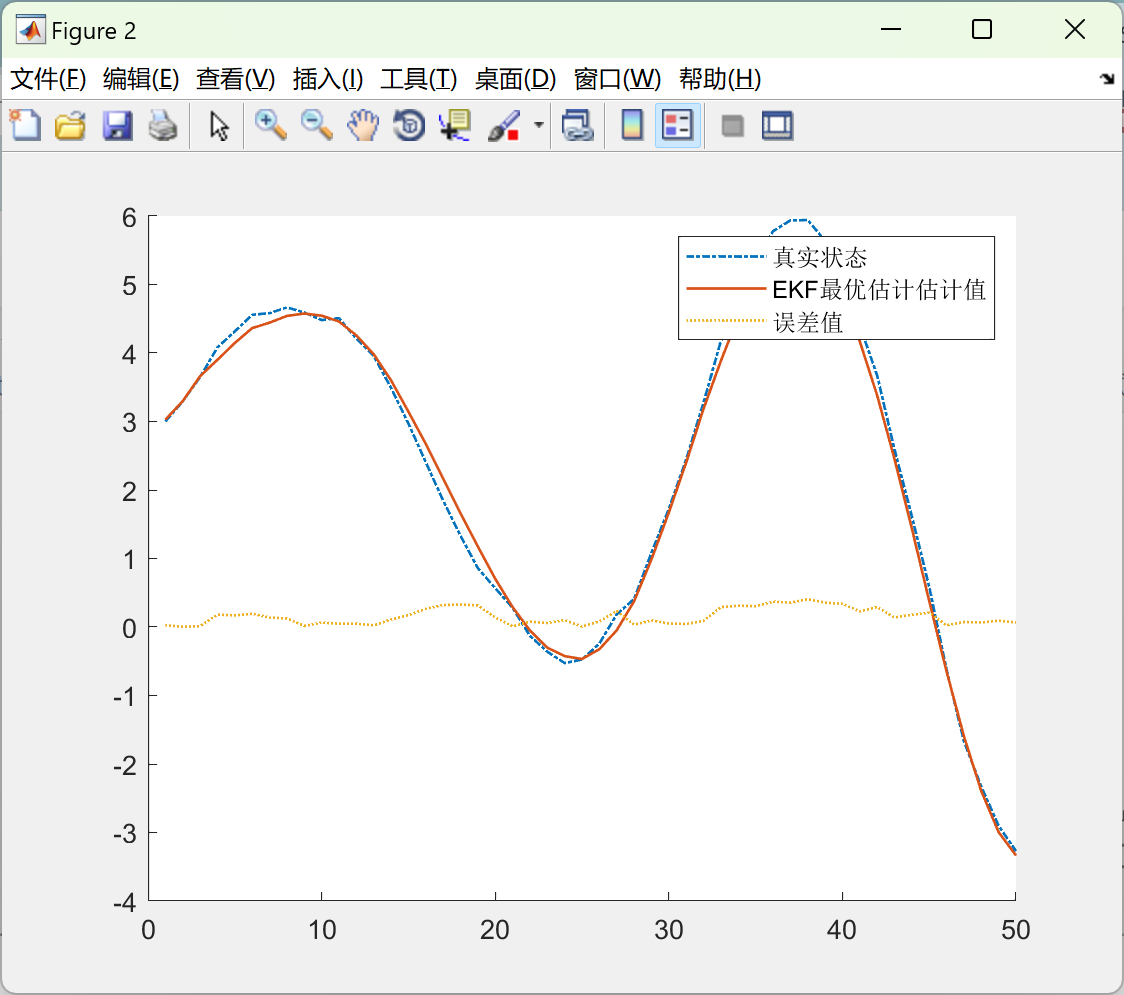
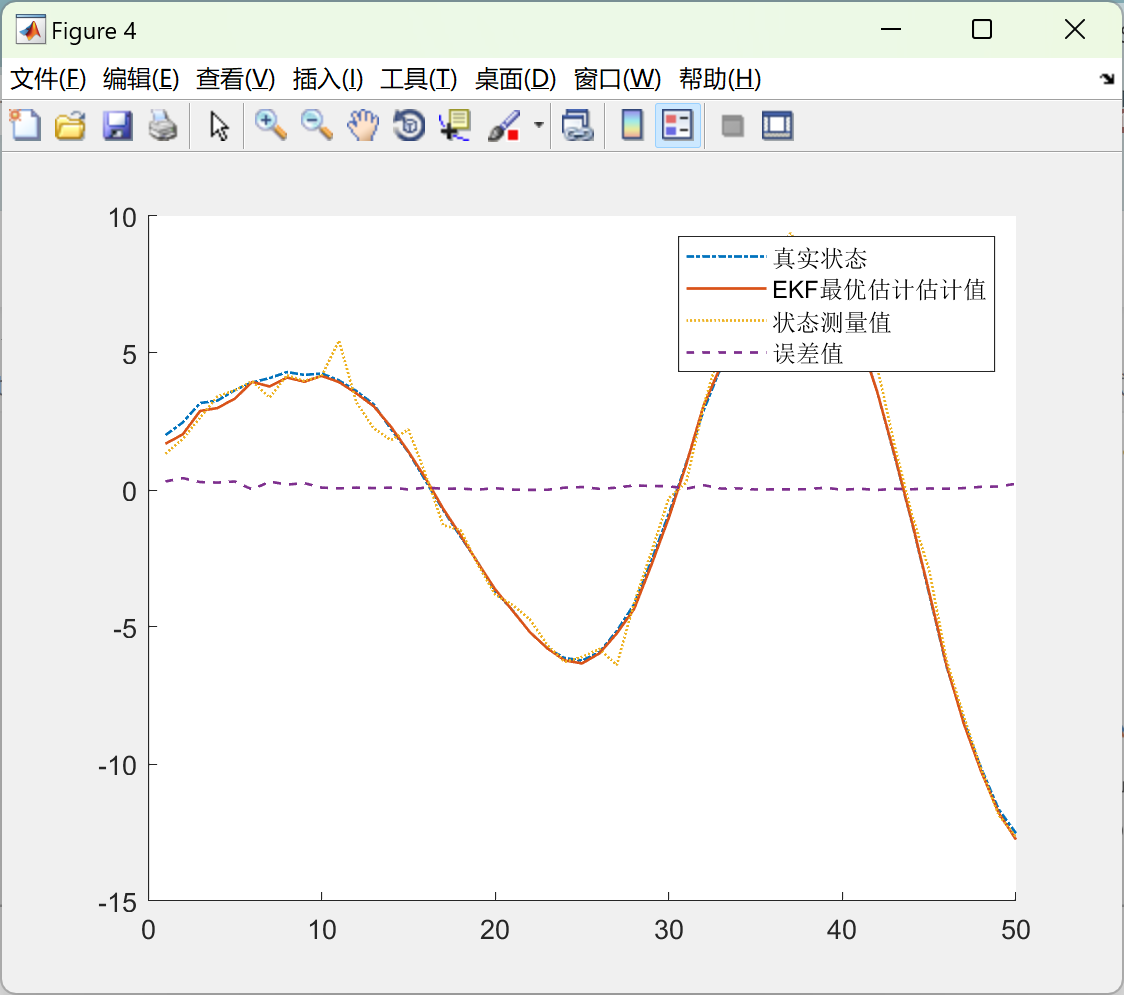
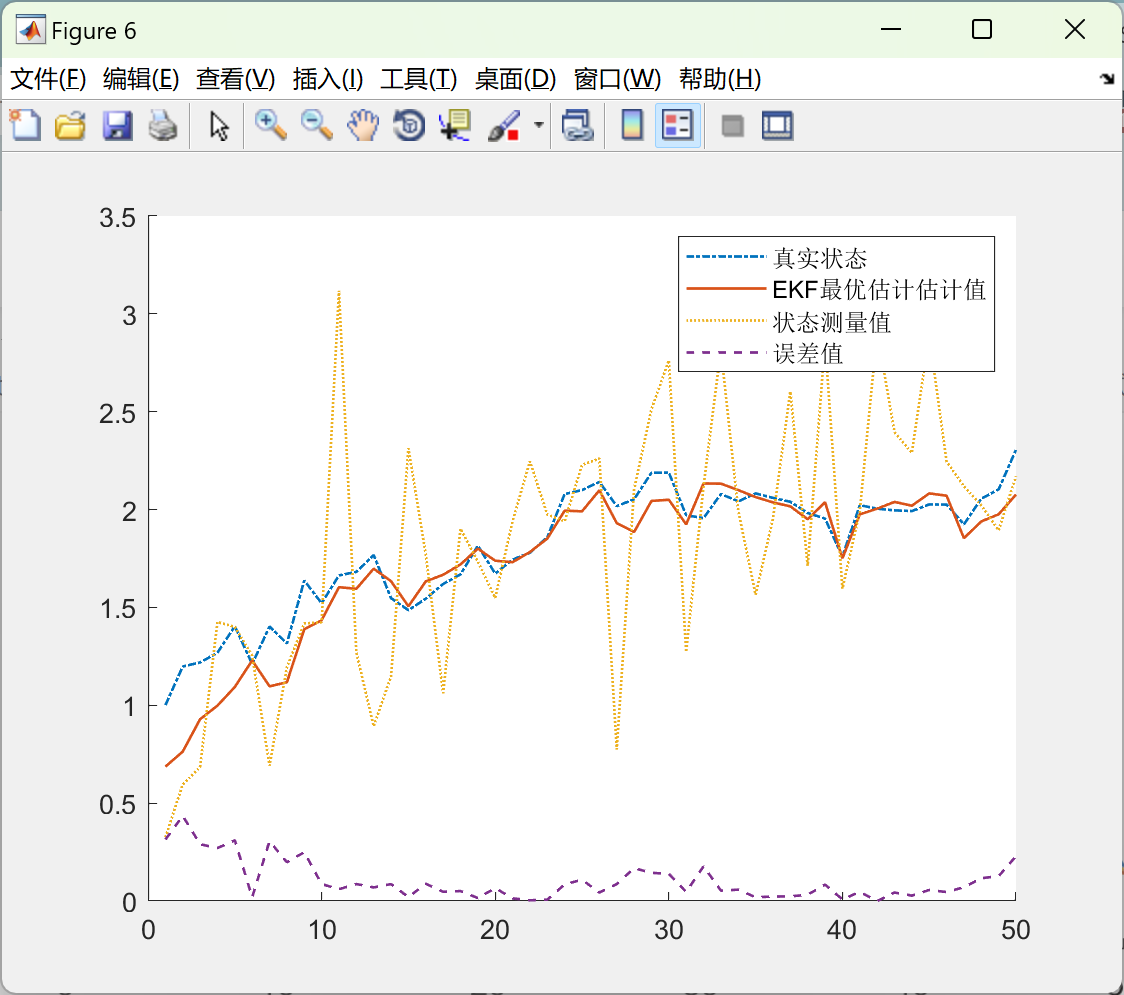
主函数部分代码:
%动态仿真实验结果
%无人机在实际飞行过程中姿态角会不断改变,所以仿真过程中使无人机的姿态角,角速度随机游走
%即每次循环对 4 维输入 u1,u2,u3,u4随机赋值
%俯仰角、俯仰角速度、横滚角、横滚角速度、偏航角、偏航角速度
%状态量:X = [x, vx, y, vy, z, vz]
%控制量:U = [u1, u2, u3, u4] u2,u3,u4:无人机在坐标系{B}三个轴上的升力矩分量[廖坤男公式(2-22)(2-27)]
%正态分布的随机变量通过非线性系统后就不再是正态的了
close all;
clear all;
%常系数
L= 0.3875; %无人机质心到电机转轴的距离 单位(m)
Ix = 0.05887; %绕机体坐标系三个轴的转动惯量 单位(kg·m^2)
Iy = 0.05887;
Iz = 0.13151;
g = 9.81; %重力加速度 单位(N/kg)
%动力学方程的常系数
a1 = -(Iy - Iz)/Ix;
a2 = -(Iz - Ix)/Iy;
a3 = -(Ix - Iy)/Iz;
b1 = L/Ix;
b2 = L/Iy;
b3 = 1/Iz;
Ts = 0.1; %采样时间
t = 5; %仿真时间
len = fix(t/Ts); %仿真步数 50
n = 6; %状态维度
w = 0.1; %过程标准差 状态转移方程的w 这几个参数???
v = 0.5; %测量标准差 观测方程的v
Q = w^2*eye(n); %过程方差
R = v^2; %测量值的方差
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]岳鹍,张月新,宋光坤.基于虚拟力分析的全柔性共轴旋翼无人机路径跟踪方法[J/OL].实验技术与管理:1-11[2024-04-27].http://kns.cnki.net/kcms/detail/11.2034.T.20240425.1624.002.html.
[2]王清华,胡永兵,李迎松.基于四旋翼无人机的嵌入式系统实践教学设计[J/OL].实验室研究与探索:1-5[2024-04-27].http://kns.cnki.net/kcms/detail/31.1707.T.20240418.0954.026.html.














 2212
2212











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









