






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
气象激光雷达图像分析研究
在经济高速发展的当下,环境保护是人类不可避免的议题,作为环保体系之一的大气环境监测,其重要性也逐渐为人们所知;结合了现代激光技术及传统雷达技术的激光雷达技术以它独特的技术优势在大气环境监测及气象领域的应用中占领一席之地。气象遥感激光雷达应用于大气环境监测和气象研究具有重要意义,与传统的微波雷达相比,激光雷达具有抗干扰性强、单色性好、方向性强等优势,对大气、海洋等地区具有高精度的遥感目前,我国气象遥感激光雷达技术在大气环境监测和气象研究中的应用效果显著。
本文目标:定位气溶胶区域并隔离行星边界层。
一、气象激光雷达的基本原理与图像特征
-
技术原理
气象激光雷达是一种主动遥感设备,通过发射激光脉冲并接收大气粒子的后向散射信号,反演大气参数。其核心原理基于激光与大气分子、气溶胶的相互作用(如米散射、拉曼散射、差分吸收等)。典型系统由激光发射机、光学接收机、转台和信息处理系统组成,通过测量回波信号的到达时间、频率变化和波束方向,获取目标的距离、速度、消光系数等参数。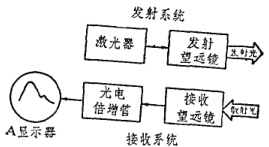
-
图像特征与分析目标
- 三维空间分辨率:激光雷达可生成高垂直分辨率(米级)的三维点云数据,适用于云层高度、气溶胶垂直分布等分析。例如,日本东芝的MP-PAWR雷达每30秒至1分钟完成一次多仰角扫描,覆盖70个以上仰角的数据。
- 多参数融合:图像中可同时包含风速、温度、气溶胶浓度等信息。例如,差分吸收激光雷达通过双波长测量反演痕量气体浓度,而多普勒激光雷达通过频率偏移计算风速。
- 动态范围与噪声挑战:原始数据常受背景光(如太阳辐射)和天气条件(雨、雾)干扰,需通过滤波和算法优化提升信噪比。
二、气象激光雷达图像处理技术及算法
-
预处理技术
- 去噪与滤波:中值滤波、阈值限定滤波(如提出的方法)可有效抑制散斑噪声;基于GPU加速的算法(如总变分去噪)提升实时性。
- 数据融合:结合多传感器数据(如低分辨率Gm-APD雷达与高分辨率ICCD相机)实现超分辨率重构,通过马尔科夫随机场模型优化全局能量函数。
-
特征提取与增强
- 边缘检测:传统算法(Canny、Sobel)在复杂环境中效果有限,改进的CNN模型通过多尺度特征提取和噪声抑制,准确率提升至91.5%。
- 超分辨率重建:非局部自相似性稀疏表示方法和图像引导算法可恢复低信噪比下的细节,例如雨滴谱测量中的模糊修正。
-
深度学习应用
- 污染源识别:基于图像分类(ResNet)和分割(U-Net)的混合模型,实现点/线/区域污染源的自动定位,准确率达91.5%。
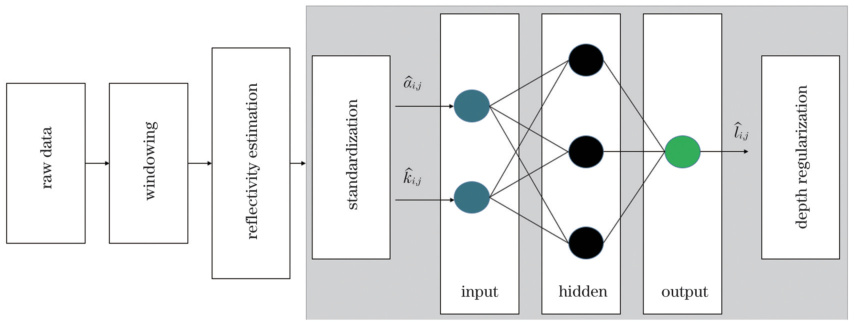
- 气象参数反演:利用LSTM网络处理时序数据,结合卫星图像生成合成点云,解决模态差异问题。
三、典型研究案例与方法对比
| 案例 | 方法 | 优势 | 局限性 | 引用 |
|---|---|---|---|---|
| 气溶胶消光系数反演(北京) | Mie散射理论+MATLAB批量处理 | 数据可视化高效,验证算法与实际气象事件一致性 | 依赖人工参数调整,自动化程度低 | |
| 污染源自动识别(砀山县) | 深度学习(图像分类+分割) | 高准确率(91.5%),支持多类型污染源识别 | 需大规模标注数据集,计算资源需求高 | |
| 降水微物理特征测量 | 基于点扩散函数的雨滴图像复原 | 修正雨滴尺度误差,提升谱分布精度 | 仅适用于特定仪器,泛化能力有限 | |
| 能见度测量比对 | 权重拟合法、斜率法、迭代算法 | 与Belfort能见度仪数据一致性高(R²>0.9) | 长曝光处理导致时间分辨率降低 |
四、行业标准与数据可靠性
-
国家标准
- GB/T 44395-2024:规范激光雷达测风数据与风塔数据的对比方法,要求观测高度覆盖10–400米,统计误差≤15%。
- QX/T 687—2023:规定连续观测、数据产品(三维风场、风切变)及计时精度(误差<10秒),确保全天候数据一致性。
-
可靠性评价
- 验证流程包括数据采集(同步风塔观测)、样本筛选(剔除雨雾干扰)和统计分析(均方根误差、相关系数)。
- 国际参考标准如IEC 61400-12-1,强调多场景测试(山地、海岸)以评估环境适应性。
五、技术难点与未来方向
-
核心挑战
- 恶劣天气影响:雨雾导致信号衰减(消光系数增大约20%),暴雪环境下探测距离缩减50%。
- 复杂数据处理:点云数据量达TB级,需开发轻量化算法(如光子筛滤波技术)和边缘计算架构。
- 多模态融合瓶颈:激光雷达与光学/毫米波雷达的数据时空对齐难题,需引入图神经网络优化。
-
前沿技术
- 固态激光雷达:芯片化设计降低成本,提升抗强光干扰能力(如1550nm波长穿透性优化)。
- 量子激光雷达:利用单光子探测技术(如)实现低信噪比下的深度估计,适用于夜间和雾霾环境。
六、结论
气象激光雷达图像分析正从单一参数测量向多模态智能感知演进。通过算法创新(如深度学习超分辨、边缘检测)和标准体系完善(GB/QX系列),其在污染监测、灾害预警等领域的实用性显著提升。未来需重点突破全天候适应性、数据融合效率和成本控制,以支撑精细化气象服务的全球部署。
📚2 运行结果





主函数部分代码:
close all
clear all
clc
%% Original
close all
clear all
clc
%ucitavanje slike
img = imread('quicklook1_crop.bmp');
imshow(img);
title('Originalna slika')
%% RGB
red = img(:,:,1); % Crvena komponenta
green = img(:,:,2); % Zelena komponenta
blue = img(:,:,3); % Plava komponenta
a = zeros(size(img, 1), size(img, 2));
just_red = cat(3, red, a, a);
just_green = cat(3, a, green, a);
just_blue = cat(3, a, a, blue);
figure,
subplot(2,2,1), imshow(img), title('Originalna slika')
subplot(2,2,2), imshow(just_red), title('Crvena komponenta')
subplot(2,2,3), imshow(just_green), title('Zelena komponenta')
subplot(2,2,4), imshow(just_blue), title('Plava komponenta')
% Popravljanje kontrasta crvene pomocu imadjust
I1=imadjust(red,stretchlim(red));
I2=imadjust(red,[.75 1],[]);
just_red_1 = cat(3, I1, a, a);
just_red_2 = cat(3, I2, a, a);
%iscrtavanje crvenih slika i histograma
figure;
subplot(2,3,1); subimage(just_red); title('Crvena')
subplot(2,3,4); imhist(red); title('Crvena histogram');
subplot(2,3,2); subimage(just_red_1); title('Crvena stretchlim');
subplot(2,3,5); imhist(I1); title('Crvena Hist stretchlim');
subplot(2,3,3); subimage(just_red_2); title('Crvena [0.75 1]')
subplot(2,3,6); imhist(I2); title('Crvena Hist [0.75 1]');
🎉3 参考文献
[1]刘玉.激光雷达在大气环境监测和气象研究中的应用探述[J].清洗世界,2022,38(02):67-68.
部分理论引用网络文献,若有侵权联系博主删除。

















 578
578

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









